1. 前言
风能是当今世界最具发展前景的新能源之一,具有重要的开发利用价值。风能的利用方式不仅有风力发电,风力提水,而且还有风力致热等 [1] - [4] 。风力提水机被人类应用已有悠久的历史。开发和应用风力和常规能源混合动力提水系统对于节省常规能源,解决广大农牧区的动力短缺,农业灌溉,改善中国的生态环境都有重要的现实意义,因此也越来越受到全球各国的重视 [5] - [8] 。
基于T-S模糊模型的建模方法为解决复杂控制系统的分析问题提供了有效途径,其主要思想是将非线性系统的状态空间划分成不同区域,并针对每个局部区域建立线性系统模型,再通过对每个子系统的加权组合得到全局系统 [9] [10] 。近年来,基于T-S模糊模型的滑模控制问题开始受到关注和研究参见文献 [11] - [14] 。
风力资源受季节和地域形态影响较大,提水系统中,风能和常规能源协同工作,二者存在相互耦合,控制难度大。本文用T-S模糊规则表示该模型,定义一组期望状态变量并将速度恒定问题转化为位移跟踪问题。设计的模糊滑模控制器保证水泵额定转速运行的同时,实现风能的最大功率跟踪,充分利用风能。
2. 系统组成及控制原理
2.1. 工作原理
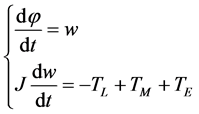
系统构成见图1所示,柴油机和电动机共同驱动水泵主轴恒速运转。图中: ,
, ,
, ,
, ,
, 分别为柴油机输出转矩,电动机输出转矩,水泵给主轴的阻转矩,水泵主轴的转速,风速。在本设计中,采用
分别为柴油机输出转矩,电动机输出转矩,水泵给主轴的阻转矩,水泵主轴的转速,风速。在本设计中,采用 控制主轴转速
控制主轴转速 恒定,
恒定, 为对主轴转速的扰动,其大小是整流环节跟踪最大功率的结果,随风速
为对主轴转速的扰动,其大小是整流环节跟踪最大功率的结果,随风速 的变化而变化,最大功率跟踪控制本文不作介绍,可参考其它相关文献。依据理论力学相关理论得以下控制系统模型:
的变化而变化,最大功率跟踪控制本文不作介绍,可参考其它相关文献。依据理论力学相关理论得以下控制系统模型:
 (1)
(1)
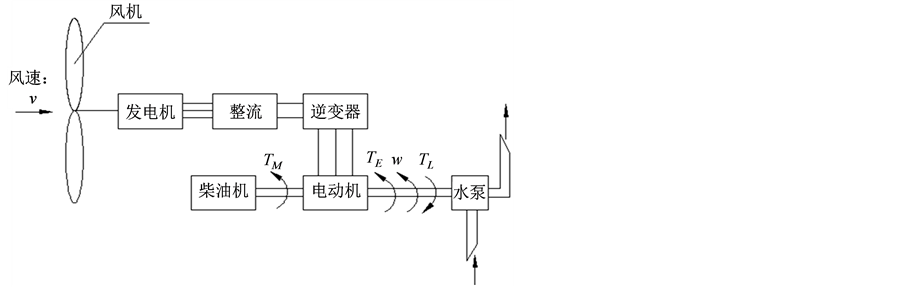
Figure 1. Theory frame chart of wind power aided pumping water system
图1. 风力辅助提水系统原理图
上式中, 是主轴转角,
是主轴转角, ,
, 是主轴转速,
是主轴转速, ,
, 是主轴转动惯量,
是主轴转动惯量, 。
。
依据离心水泵的机械特性得:
 (2)
(2)
式(2)中 是与水泵结构有关的常数。
是与水泵结构有关的常数。
柴油机运行过程中输出的转矩是转速 和电子调速器输出轴位移
和电子调速器输出轴位移 的函数,即:
的函数,即:
 (3)
(3)
式(3)中 是柴油机电子调速器输出轴的位移 [15] 。结合柴油机的速度特性和调整特性,测试得到
是柴油机电子调速器输出轴的位移 [15] 。结合柴油机的速度特性和调整特性,测试得到 组数据,方法如下:
组数据,方法如下:
1) 将调速范围等分为 段,这里取
段,这里取 ;
;
2) 每段的速度取段末点,依次为: ;
;
3) 柴油机加负载,其大在允许范围小随机变化,依次将柴油机输出转速控制在 ,记录5组数据,每组数据长度为
,记录5组数据,每组数据长度为 ,其中,第
,其中,第 组的数据为
组的数据为 ,基于每组数据,均可获得一个线性映射函数
,基于每组数据,均可获得一个线性映射函数
 (4)
(4)
上式中 辨识方法是:第
辨识方法是:第 组的数据
组的数据 的每个样本点到直线式(4)的距离平方和最小,直线上方的点距离平方取正,直线下方的点距离平方取负,这是一个参数
的每个样本点到直线式(4)的距离平方和最小,直线上方的点距离平方取正,直线下方的点距离平方取负,这是一个参数 寻优的过程,具体方法见相关文献。
寻优的过程,具体方法见相关文献。
式(4)可以由如下5个模糊规则方程表示:
If  is
is  then
then  (5)
(5)

则任意 时系统线性方程为:
时系统线性方程为:
 (6)
(6)
式(6)中的权系数可根据输入量 与各速度段末点
与各速度段末点 之间的距离获得,即为
之间的距离获得,即为
 (7)
(7)
上式中 为灵敏度系统,反映了输入值
为灵敏度系统,反映了输入值 远离速度段末点
远离速度段末点 时隶属度降低的速度。
时隶属度降低的速度。
依据三相异步交流电动机的机械特性得:
 (8)
(8)
式(8)中 是与电动机结构、逆变器输出频率有关的常数(本设计中,输出频率恒定,为50 Hz/秒);
是与电动机结构、逆变器输出频率有关的常数(本设计中,输出频率恒定,为50 Hz/秒); 是转差率;
是转差率; 是逆变器输出电压;
是逆变器输出电压; 是转子每相绕组的电阻;
是转子每相绕组的电阻; 是电动机不动(
是电动机不动( )时转子每相绕组的感抗。
)时转子每相绕组的感抗。 其大小是整流环节跟踪最大功率的结果,随风速
其大小是整流环节跟踪最大功率的结果,随风速 的变化而变化,但每个时刻其值确定。
的变化而变化,但每个时刻其值确定。
2.2. 系统模型建立
由式(1)、式(3)、式(8)得:
 (9)
(9)
式(9)中, 为可测状态变量,
为可测状态变量, ,
, 随机变化,当前时刻值已知,
随机变化,当前时刻值已知, 分别是系统的控制输入和输出。该系统为带干扰的单入单出二阶仿射非线性系统。控制转速
分别是系统的控制输入和输出。该系统为带干扰的单入单出二阶仿射非线性系统。控制转速 恒定等价于控制
恒定等价于控制 为斜率
为斜率 不变的斜线。
不变的斜线。
3. 风力辅助提水系统的模糊滑模变结构控制
滑模变结构控制是变结构控制系统的一种控制策略。这种控制策略与常规控制的根本区别在于控制的不连续性,即一种使系统“结构”随时间变化的开关特性。该控制特性可以迫使系统在一定的条件下沿规定的状态轨迹作小幅度、高频率的上下运动,即所谓的“滑动模态”和“滑模”运动。这种滑动模态是可以设计的,与系统参数及扰动无关。
设计滑模变结构控制器的基本步骤包括两个相对独立的部分:
1) 设计切换函数
 (10)
(10)
其中 为系统状态及其各阶导数,选取常数
为系统状态及其各阶导数,选取常数 ,使得多项式
,使得多项式 为Hurwitz稳定,
为Hurwitz稳定, 为Laplace算子。
为Laplace算子。
切换函数应使它所确定的滑动模态渐近稳定且具有良好的动态品质。
2) 设计滑动模态控制律 ,使到达条件得到满足,即:
,使到达条件得到满足,即: 。
。
滑模控制器中,控制率通常由等效控制 和切换控制
和切换控制 组成。切换控制将系统状态保持在滑模面 上,等效控制迫使系统状态在滑模面上滑动。本文利用模糊规则,建立基于等效控制和切换控制的模糊系统,来消除抖振。
组成。切换控制将系统状态保持在滑模面 上,等效控制迫使系统状态在滑模面上滑动。本文利用模糊规则,建立基于等效控制和切换控制的模糊系统,来消除抖振。
3.1. 等效滑模控制器设计
由式(9)得,设被控对象为
 (11)
(11)
系统跟踪误差为
 (12)
(12)
上式中, 是系统状态变量
是系统状态变量 的目标,则切换函数为
的目标,则切换函数为
 (13)
(13)
上式中, ,其中
,其中 ,满足Hurwitz条件。
,满足Hurwitz条件。
通过取 ,可得
,可得
 (14)
(14)
则等效控制器为
 (15)
(15)
3.2. 滑模控制器设计
为了满足滑模到达条件 ,其中
,其中 ,必须采用切换控制,切换控制器设计为
,必须采用切换控制,切换控制器设计为
 (16)
(16)
滑模控制器为
 (17)
(17)
稳定性证明:
 (18)
(18)
将式(15) 式(17)代入式(18),得
式(17)代入式(18),得
 (19)
(19)
3.3. 模糊控制器设计
根据模糊控制的原理,如果滑模控制器由等效滑模控制和切换控制两部分构成,其控制规则为
If  is
is  then
then  is
is  (20)
(20)
If  is
is  then
then  is
is  (21)
(21)
其中模糊集 和
和 分别表示“零”和“非零”。
分别表示“零”和“非零”。
模糊规则式(20)表示当切换函数 为零时,模糊控制器为等效控制
为零时,模糊控制器为等效控制 。模糊规则式(21)表示当切换函数
。模糊规则式(21)表示当切换函数 为非零时,模糊控制器为等效滑模控制
为非零时,模糊控制器为等效滑模控制 。
。
采用去模糊化方法,模糊控制器设计为
 (22)
(22)
 (23)
(23)
当 时,
时, ,此时控制律为传统的等效滑模控制。当
,此时控制律为传统的等效滑模控制。当 时,通过隶属函数
时,通过隶属函数 的变化实现抖振的消除。
的变化实现抖振的消除。
4. 仿真
针对系统式(9),考虑以下SISO仿射非线性系统
 (24)
(24)
考虑如下形式的随机干扰
 (25)
(25)
 是
是 之间的随机数,即
之间的随机数,即 在
在 随机变化,符合自然界风能的特征。
随机变化,符合自然界风能的特征。
设采样时间为1秒,系统给定的输入为,
 (26)
(26)
基于模型式(24),调速范围在这为 ,无量纲,划分为10段,每段速度变化量相等,为6。
,无量纲,划分为10段,每段速度变化量相等,为6。
模糊系统的输入输出隶属函数形式如图2、图3所示。模糊规则设计为
1) If ( is
is ) then (
) then ( is
is )
)
2) If ( is
is ) then (
) then ( is
is )
)
3) If ( is
is ) then (
) then ( is
is )
)
系统的响应结果如图4所示,根据仿真数据,输出转速误差在 以内。由图4可以看出,系统取得了良好的控制效果,有一定的应用和推广价值。
以内。由图4可以看出,系统取得了良好的控制效果,有一定的应用和推广价值。
图4中的曲线输出转角和输出转速是式(24)确定的模型变量,无量纲。
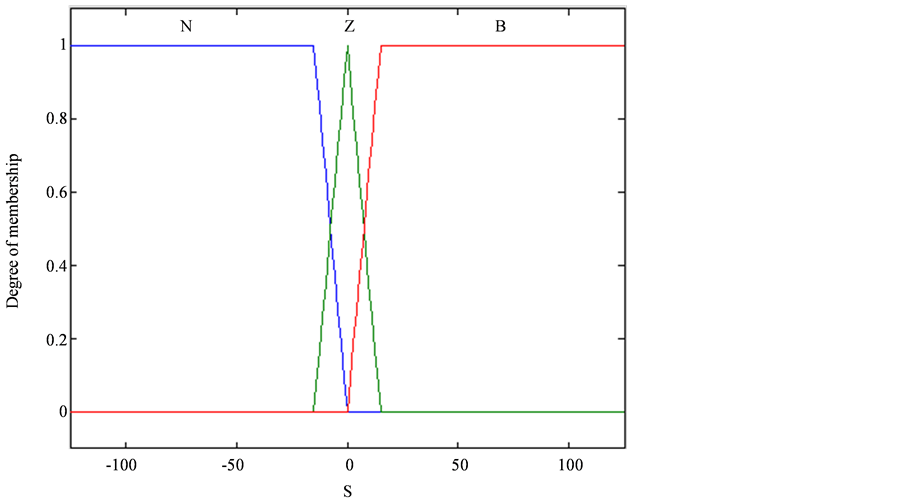
Figure 2. The degree of fuzzy input membership
图2. 模糊输入隶属函数

Figure 3. The degree of fuzzy output membership
图3. 模糊输出隶属函数

Figure 4. The result curve of system response
图4. 系统响应的结果曲线
5. 结论
结合滑模变结构控制器和模糊规则的优点,本文给出了能实现最大功率跟踪的风力辅助提水控制系统的仿射非线性单输入单输出的模型结构,基于模型实现了模糊滑模变结构控制,提高了能源利用效率。仿真结果验证了采用的系统结构和控制策略的有效性和可行性。
基金项目
教育部“春晖计划”合作科研项目(项目编号:Z2011082)。