1. 引言
由于煤、石油等不可再生能源的不断消耗与其造成的严重环境问题,风能、太阳能等可再生能源发电技术逐渐被人们重视。随着国内和国际海上风电的大规模开发,海上风电场的接入方式成为研究的热点。由于海上风速不可预测,造成风机转速不稳定,与电网频率差别较大,很难符合交流并网的条件。风电的不稳定性对电网和电能质量造成的影响使其难以用交流和传统的直流输电方式并网。基于电压源型换流器的高压直流(VSC-HVDC)输电在潮流方向改变时,直流电压极性不变,换流器之间无须通信,能实现有功无功的独立控制,为交流母线提供动态的无功补偿而且能够起到STATCOM的作用,提高电力系统的电压、功角稳定性,并能向无源网络供电[1] -[7] 。基于VSC的多端直流输电技术在运行灵活性、可靠性方面较VSC-HVDC有更大的技术优势[8] [9] 。
多端VSC-HVDC系统可以实现多电源供电,多落点受电,有较强的灵活性和经济性[10] -[12] 。本文建立了PSCAD/EMTDC下四端VSC-MTDC输电系统模型,每个换流站采用基于IGBT三相桥型拓扑结构,设计了定有功功率控制器、定无功功率控制器和定直流电压控制器。分析了VSC中的电压偏差控制和电压下降控制的工作原理,提出了一种综合电压控制策略。仿真结果表明多点电压控制方式响应迅速,功率潮流自动调整,功率振荡和超调量小,稳定性增强,但良好电压质量和功率调节能力无法同时满足。
2. VSC-MTDC输电系统模型
基于电压源型换流器的多端直流(VSC-MTDC)输电送端和受端的换流器均采用VSC,结构如图1所示。VSC使用具有高频开断功能的器件IGBT,使得PWM的应用成为可能。载波滤波器、电容C连接在交流电网和接地点之间,R和L分别为换流器的电阻和电感。GG1~GG6分别代表六个IGBT的导通脉冲。
四端VSC-MTDC系统的原理图如图2所示。系统由四个换流站、五条直流输电线路组成,换流站1、2与海上风电场连接,换流站3、4与陆地上交流电网连接,直流输电线路可以实现海上风电场与岸上电网的功率交换。换流站3控制全网的电压水平,换流站1、2、4控制系统的有功功率。L1~L5为直流线路,对于流过直流电流较大的线路L5,可采用双回线。
基于电压源型换流器的输出特性与所使用器件的开关频率有很大关系,采用PWM控制技术可以提高器件的开关频率以获得很好的正弦波形。换流站3采用直流电压与定无功功率控制策略,保证电网的有功功率平衡和全网的电压水平。换流站1、2、4采用有功功率与无功功率相结合的控制策略,可以独立控制换流器吸收的有功和无功。
利用PSCAD/EMTDC建立了四端VSC-MTDC输电系统模型,四个换流站参数一致,采用基于IGBT
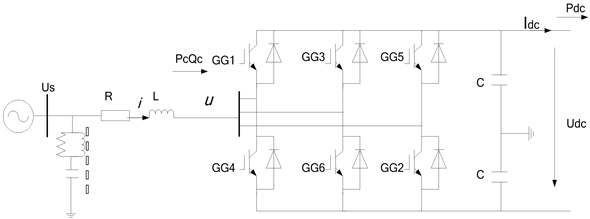
Figure 1. Topology of the voltage source converter
图1. 换流器拓扑图
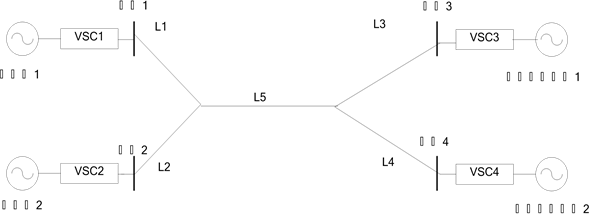
Figure 2. Schematic diagram of four-terminal VSC-MTDC system
图2. 四端VSC-MTDC系统原理图
三相桥型拓扑结构,每个换流器可以运行在整流或逆变状态。交流系统额定电压400 kV,换流器变压器变比为420 kV/230 kV,额定容量为1500 MVA,高通滤波器截止频率为450 Hz,电抗器电感为0.0724 H,直流电容器为150 mF。直流线路均采用T型等效电路,L1、L2、L4、L5的等值电阻为4 Ω,等值电感为8 mH,等效电容为2 mF;直流线路L3的等值电阻为16 Ω,等值电感为32 mH,等效电容为4 mF。
3. 基于直流电压-有功功率调节特性的下降控制方式
VSC-MTDC系统通常由一个控制系统直流电压的平衡节点和一系列控制注入交流系统有功功率的节点组成,称为单点电压控制方式。平衡节点保证了流入系统的有功功率总和等于流出系统的有功功率加上内部功率损耗。只要保持直流网络稳定运行所需的有功功率不超过平衡换流站的额定容量,并且直流电压控制足够快地处理极端的过渡过程,直流过电压是可以避免的。可是在过渡过程平衡节点会承受很大压力,不能再把电压控制在规定范围内。
采用分布式平衡节点可以解决以上问题,控制有功功率的节点可以协助主平衡节点来维持系统直流电压稳定。分布式平衡节点有两种控制方式:电压偏差控制和电压下降控制。采取电压偏差控制时,若有功功率不平衡导致电压偏差过大,另一个换流站会把直流电压控制在一个新的参考值。采取电压下降控制时,换流站的直流电压随有功功率(或输出电流)的增加而线性下降,可允许多个换流站同时控制直流电压,称为多点电压控制方式。
3.1. 电压偏差控制
在多端直流输电系统中可以采用电压偏差控制。主导换流站采用定直流电压控制,参考电压为Udcref,其他换流站都采用两级直流电压控制,如图3所示。它提高了系统的灵活性:所有换流站的有功功率可以通过改变有功功率参考值Pref来调节,同时,有功功率极限值Pmin和Pmax总保持在这个换流站的边界值;而且,它保证了所有母线都有一定的重要性。若希望一条母线总是工作在有功功率参考值,电压偏差值可以变得足够大。当主平衡节点达到了功率极限,其他节点都会首先成为平衡节点。
为了防止换流站间功率的不稳定振荡,直流电压裕度需比较大,这是电压偏差控制的一个缺点。PI控制器可以保持直流电压稳定在参考值,可是,它不能同时控制多点的直流电压,会产生次优静态工作
点和摄振,因此,多端系统适宜采用电压下降控制。
3.2. 电压下降控制
在没有PI控制器的条件下使用电压下降控制时,电压控制器的有功功率P会随着直流电压Udc的升高而下降。当Udc下降时,平衡节点注入直流网络的有功功率会相应增加,达到新的平衡,直流电压稳定在一个更低的水平,如图4所示。图中,A是起始平衡位置,B是再次平衡后的位置,ΔUdc和ΔP分
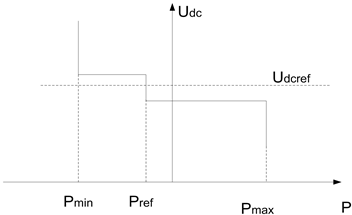
Figure 3. Schematic diagram of four-terminal VSC-MTDC system
图3. 四端VSC-MTDC系统原理图
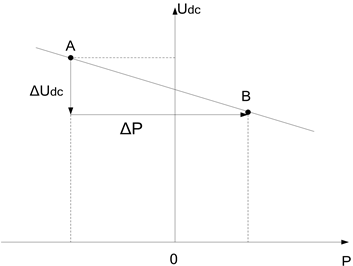
Figure 4. Droop characteristics of DC voltagereal power
图4. 直流电压–有功功率下降特性曲线
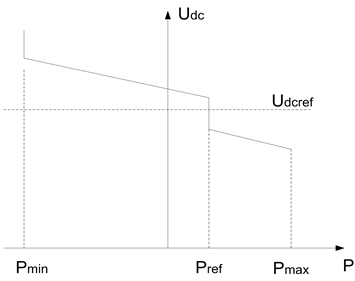
Figure 5. Droop characteristics of DC voltagereal power
图5. 直流电压–有功功率下降特性曲线
别是直流电压和有功功率的变化量。比例控制器的使用保证了多个换流器能同时调节电压。
电压下降控制可以引入直流电压偏差,如图5所示,但必须有一个主导换流站采用无电压偏差的电压下降控制或PI控制,可以使直流电压在参考电压附近连续调节。当主导换流站采用PI控制来调节直流电压,其他换流站的直流电压下降只在直流线路电压下降超出电压界限的情况下才会产生影响。PI控制器能实现无差控制,因此直流电压能保持在电压偏差内。主导站必须采用PI控制,因为它可以降低换流站的电压水平。
在图3中,VSC1、VSC2连接风电场,VSC3、VSC4连接交流电网。主导换流站VSC3采用直流电压控制方式,VSC4采用引入直流电压偏差的直流电压-有功功率下降控制方式,实现多点直流电压控制。VSC4的直流电压-有功功率下降特性曲线如图6所示,Udcref为直流电压参考值,Udcst为VSC4直流启动电压,Udcmax为VSC4直流电压最大值,Pmin为换流站向直流网络吸收的有功功率最大值。当VSC4的直流电压Udc未达到启动电压Udcst时,输出的有功功率为恒定值0。当VSC4的直流电压Udc满足Udcst ≤ Udc ≤ Udcmax,换流站4的直流电压随着输出有功功率的增加而线性下降,下降斜率与换流站的容量有关。下降斜率较陡时,换流站的功率调节能力较强,但直流电压偏离额定值较大;下降斜率较平缓时,直流电压比较稳定,但是功率调节范围较小。设特性曲线斜率为k,则
 (1)
(1)
当VSC4满载时,VSC4会进入定功率状态,输出的有功功率保持在Pmin,不再控制直流电压。
4. 仿真验证
4.1. 电压偏差控制仿真
VSC3采用定直流电压控制,VSC1、VSC2、VSC4采用两级电压偏差控制,高值参考电压420 kV,低值参考电压380 kV。
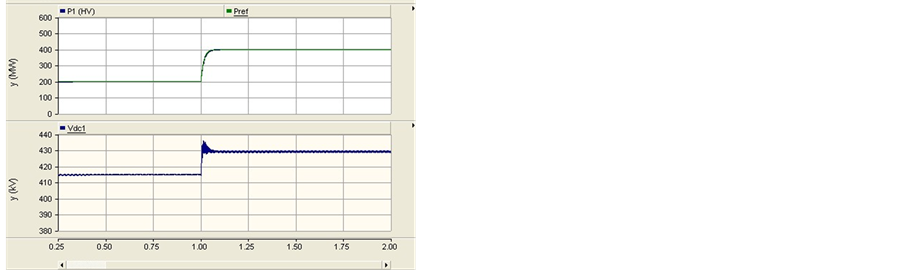
例1:VSC3直流电压指令值400 kV,初始时刻,VSC1、VSC2的有功功率指令值Pref为200 MW,VSC4的有功功率指令值Pref为−200 MW,在1.0 s时刻,VSC1、VSC2的有功功率指令值Pref阶跃到400 MW,VSC4的有功功率指令值Pref阶跃到−400 MW。仿真结果如图7。
从图7可知,由于VSC1、VSC2有功功率参考值变化,静态工作点在特性曲线的定有功功率控制段变为在定直流电压控制段,直流电压为高参考值420 kV,有功功率响应时间为0.4 s。由于VSC3采用定直流电压控制,VSC4的直流电压保持恒定,VSC4的有功功率稳定在参考值。状态改变时换流站的有功功率发生振荡,其中VSC4的有功功率超调量为−83.8 MW,直流电压超调量−14.2 kV。
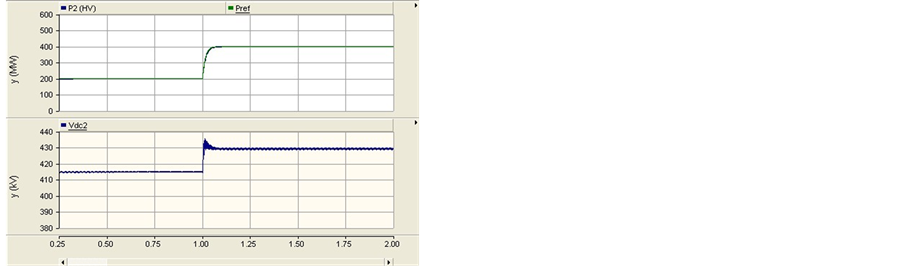
例2:VSC1、VSC2的有功功率指令值为50 MW,VSC4的有功功率指令值为−50 MW,初始时刻,
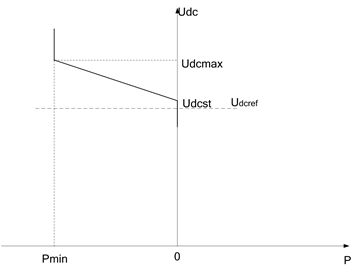
Figure 6. Udc-P droop characteristics of VSC4
图6. VSC4的Udc-P下降特性曲线
(a) VSC1的有功功率和直流电压(b) VSC2的有功功率和直流电压 (c) VSC3的有功功率和直流电压(d) VSC4的有功功率和直流电压
Figure 7. Simulations results of voltage deviation control—Case 1
图7. 电压偏差控制例1的仿真结果
(a) VSC1的有功功率和直流电压(b) VSC2的有功功率和直流电压(c) VSC3的有功功率和直流电压(d)VSC4的有功功率和直流电压
Figure 8. Simulations results of voltage deviation control—Case 2
图8. 电压偏差控制例2的仿真结果
VSC3的直流电压指令值为400 kV,在1.0 s时刻阶跃到410 kV,仿真结果如图8。
从图8可知,静态工作点始终位于VSC1、VSC2、VSC4特性曲线的定有功功率控制段,因此,VSC3直流电压指令值改变前后,各换流站的有功功率不变。由于VSC3的直流电压升高,其他换流站的直流电压均升高相同的数值。系统响应迅速,振荡小,有部分超调。其中,VSC3的直流电压超调量为2.3 kV,有功功率超调量为67.81 MW。
4.2. 下降控制仿真
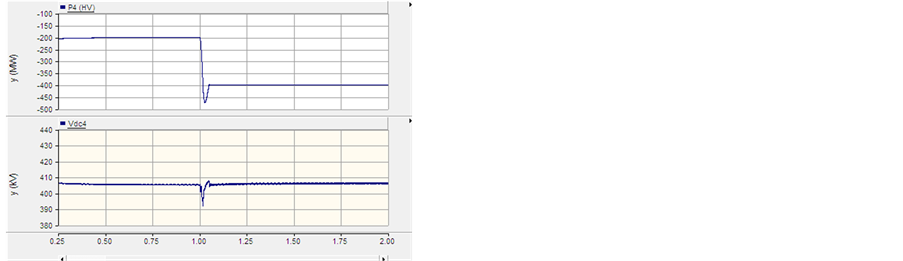
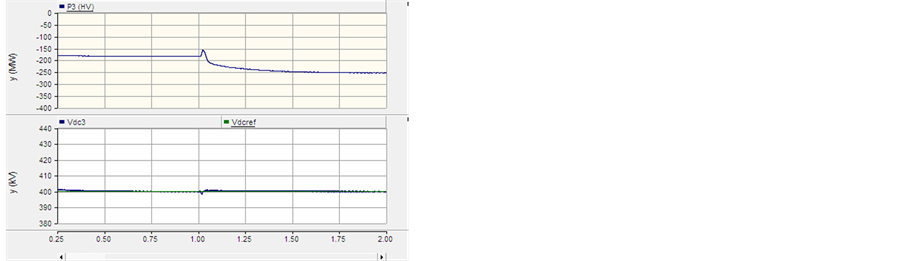
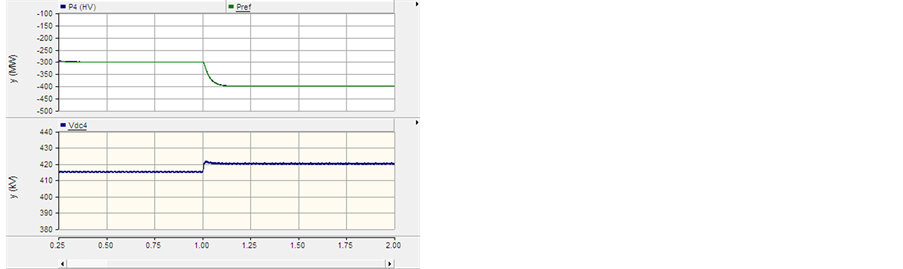
VSC1、VSC2采用定有功功率控制,VSC3采用定直流电压控制,VSC4采用基于直流电压–有功功率的下降控制。设置VSC4的启动电压Udcst为400 kV,电压最大值Udcmax为420.2 kV,Pmin为−400 MW,进行仿真。
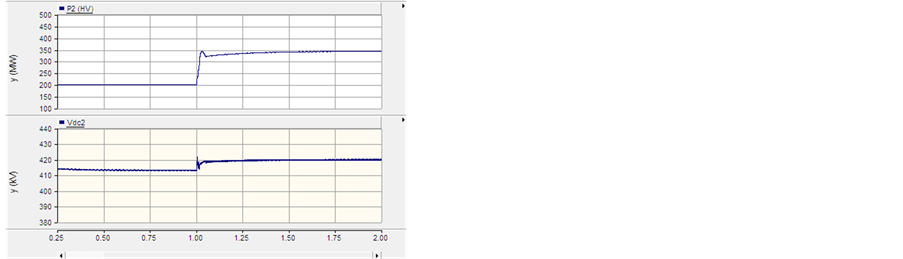
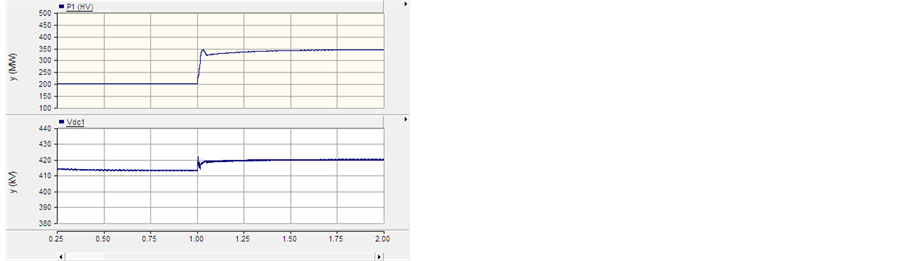
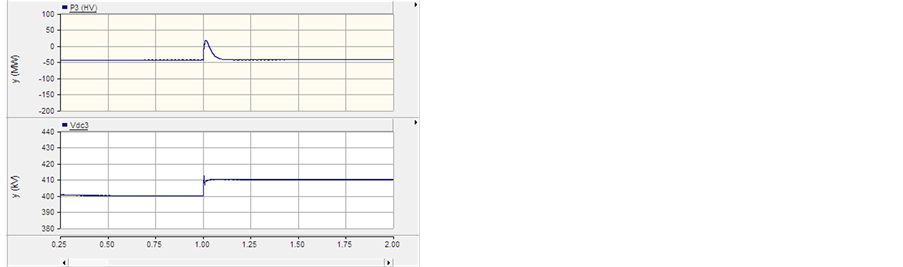
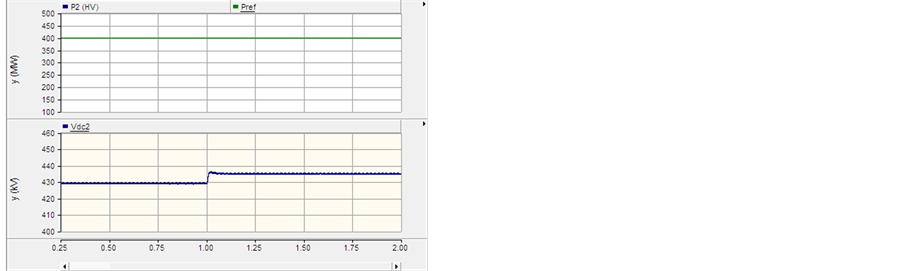
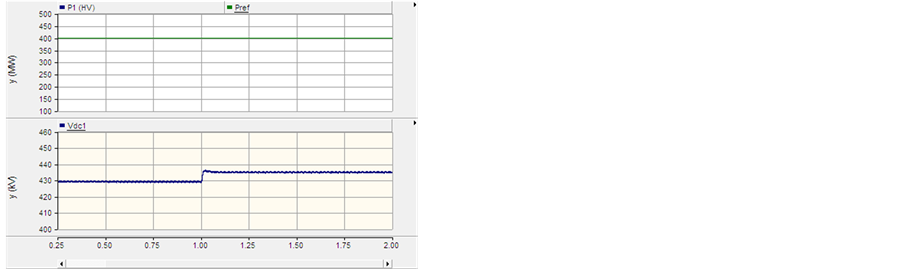
例1:VSC3直流电压指令值400 kV,初始时刻,VSC1、VSC2的有功功率指令值为200 MW,在1.0 s时刻,阶跃到400 MW,仿真结果如图9。
可以看出,当注入系统的有功功率发生阶跃变化时,各换流站的有功功率基本无超调,VSC3和VSC4的有功功率能够快速地按一定规律分配,直流电压快速跟踪功率的变化达到新的稳定值,响应时间小于0.05 s。与图7的仿真结果相比,过渡过程平缓,各换流站的过电压和低电压减小。当系统有功功率发生变化时,此控制策略有良好的动态响应特性。
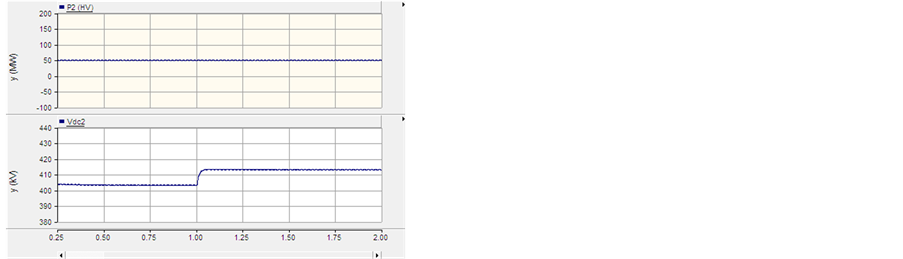
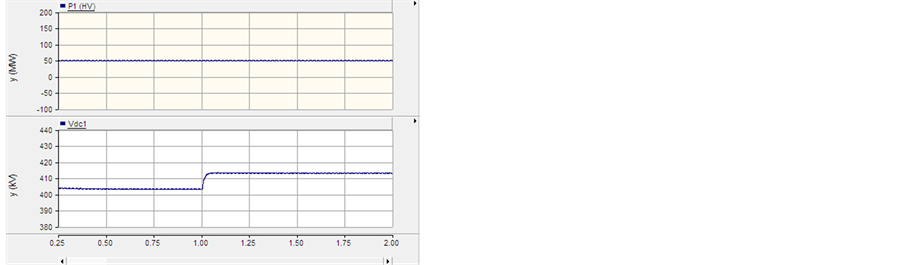
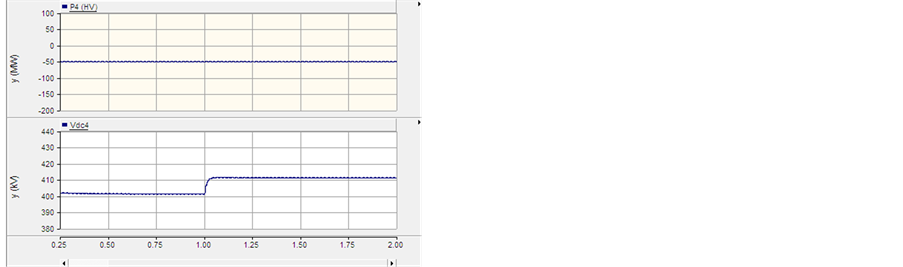
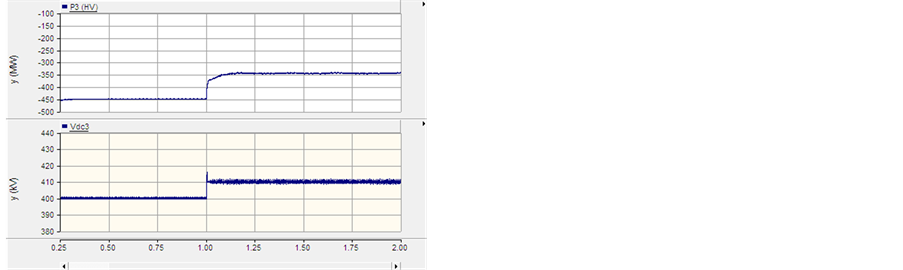
例2:VSC1、VSC2的有功功率指令值为400 MW,初始时刻,VSC3的直流电压指令值为400 kV,在1.0 s时刻阶跃到410 kV,仿真结果如图10所示。
可以看出,当直流电压发生阶跃变化时,VSC1、VSC2的有功功率保持在指令值,系统电压迅速稳

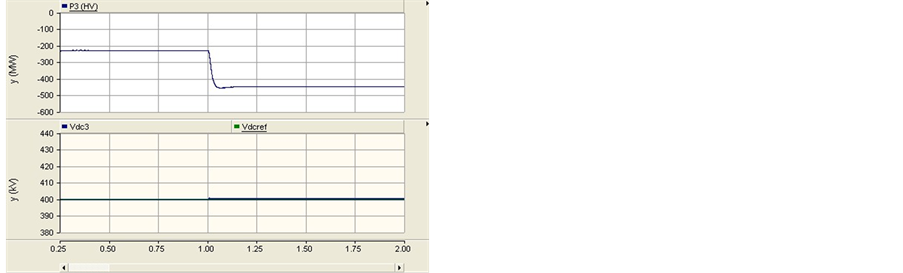
(a) VSC1的有功功率和直流电压(b) VSC2的有功功率和直流电压(c) VSC3的有功功率和直流电压(d) VSC4的有功功率和直流电压
Figure 9. Simulations results of voltage drop control—Case 1
图9. 下降控制例1的仿真结果
(a) VSC1的有功功率和直流电压(b)VSC2的有功功率和直流电压(c) VSC3的有功功率和直流电压(d)VSC4的有功功率和直流电压
Figure 10. Simulations results of voltage drop control—Case 2
图10. 下降控制例2的仿真结果
定在新的值。VSC3直流电压超调量为5.56 kV。与图8的仿真结果相比,VSC3的有功功率无超调,直流电压超调较大,但其他换流站的直流电压偏差减小。随着电压的升高,VSC4吸收的有功功率按比例下降,VSC3吸收的有功功率增大,维持系统的功率平衡,系统响应时间短。
5. 结论
(1) 多端直流输电系统的规模越来越大,多点电压控制可以减少系统对主导站的依赖性。基于电压偏差控制和直流电压-有功功率下降控制的功率控制器结构简单,换流站之间无需通信,有较好的灵活性和可靠性。
(2) 采用电压偏差控制虽然能实现分布式电压控制,减轻主导换流站的压力,但当换流站状态改变,输送的有功功率变化时,系统响应慢,直流电压偏离参考值较大,有功功率发生明显振荡,超调量大。当定直流电压控制器参考电压改变时,超调量小,但其他换流站电压偏差较大,不能同时控制多点电压。
(3) 采用直流电压控制和基于直流电压-有功功率调节特性的下降控制相结合的电压控制方式的多端系统可以稳定运行,系统控制简单,响应迅速,功率潮流自动调整,功率振荡和超调量小,稳定性增强,但良好电压质量和功率调节能力不能同时得到满足。仿真结果证明了当稳态工作点在下降特性上,VSC4吸收的有功功率下降时,直流电压将按一定规律增加。
项目基金
山东省科技发展计划项目资助(2012GGA01215/2012GQX20115)。