1. 引言
探地雷达(Ground Penetrating Radar,简称GPR),是采用无线电波检测地下介质分布,以及对不可见目标体或地下界面进行扫描,以确定其内部结构形态或位置的电磁技术[1] 。探地雷达具有分辨率高、无损、操作简便、抗干扰能力强等特点,从数据采集到图像处理实现了一体化。可实时输出现场剖面记录图等优势,适用于各种环境条件,只要地下管线目标与周围介质之间存在足够的物性差异,就能被探地雷达发现。探地雷达的管线探测能力,弥补了管线探测仪的探测缺陷,因此在城市地下管线的探测中得到普遍应用。
2. 探测原理
探地雷达探测是以地下不同介质的介电常数差异为基础的一种无损物探方法。它通过发射天线向地下发射高频电磁脉冲,主频为数十兆赫至数百兆以至千兆赫,以宽频带短脉冲形式,由地面通过发射天线T送入地下,此脉冲在向地下传播过程中遇到地层的变化界面会产生反射波。反射波传播回地表后被接收天线所接收,并将其传入主机进行记录和显示,再经过资料的后处理,进行反演解释便可得到地下岩、土层的分界面及地下管线的位置、埋深等参数,如图1所示。由于非金属材质的管道一般都具有较高的电阻率,与周围介质存在明显的介电常数差异,因此采用探地雷达方法进行探测,会有明显的效果。
3. 探测方法
3.1. 管线情况调查
为取得最佳的探测效果,在探测之前,首先要对所探目标管线的基本情况进行充分调查,对目标管线附近的地下埋设物(如电缆、其它管线、暗沟等)也要有较全面的了解,特别是对附近其它管线的基本情况(如材料、管径、大致位置、大致埋深、铺设走向等)要有充分的了解,以便于与雷达探测的结果对比,并排除浅部管线产生的影响,确定需定位的目标管线。
3.2. 探测剖面的布置
雷达剖面的布设应做到以下几点:
1) 雷达剖面应尽量垂直管线走向;
2) 尽量不要将雷达剖面定在管线拐点,拐点的确定应在雷达探测基础上利用交会法确定;
3) 雷达剖面应尽量避开高压电线、变电站等高频电磁干扰较大的区域;
4) 对雷达剖面上的其它类型地下管线应作详细调查,必要时应用管线仪进行初测,以避免将其它管线异常相似(尤为相似的是给水管)的定为排水管线,造成定位失误。
3.3. 雷达参数的设定
在探地雷达探测施工前,应针对测区的场地条件、地段环境、管线分布等特点,选择有代表性地段的已知管线进行方法试验。通过与已知明显管线点的对比、校核,通过不同频率天线信号的对比,确定
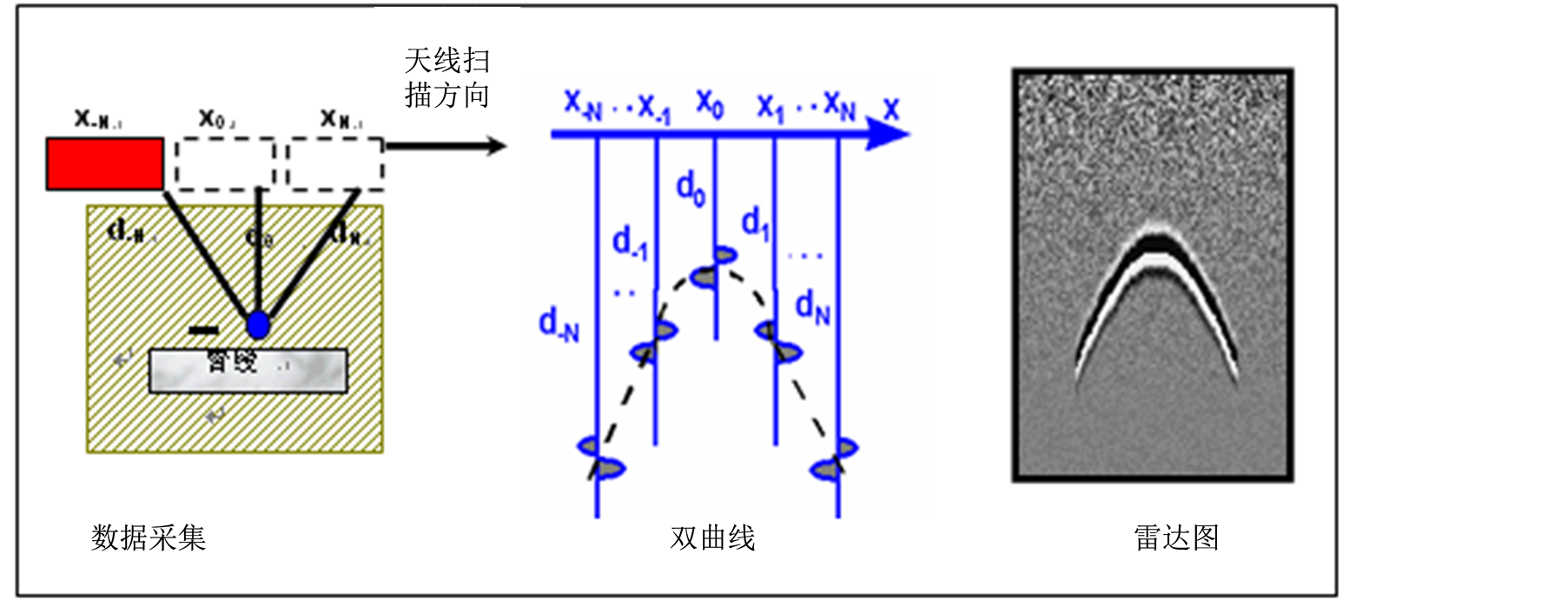
Figure 1. Detection principle diagram
图1. 探测原理图
该方法和仪器的有效性和精度,选择最佳的探测方式、采样方法、天线频率、最佳收发距、时窗和合适的迭加次数等,以提高工作效率和探查成果精度。
3.4. 雷达异常的判断
管线异常从理论上讲,在雷达波形图上,管线的反射同向轴会呈现出双曲线型弧状异常,一般还会有两次甚至多次回波反射出现[2] 。但在实际的探测工作中,由于管线材料差异、管线上部的覆盖物变化较大、探测剖面与管线走向不完全垂直、管线内充水丰富等原因,所得的实测波形就不会很标准,有时还会有较大的畸变。另外,在一条剖面上还可能会有不止一个双曲线异常出现,在这些情况下,要想准确分辨出目标管线异常,就必须增加现场调查工作,还有特别重要的是要平移探测剖面,重复进行剖面探测,从异常的重复性、连续性方面进行综合判断。
4. 雷达图像的解译
探地雷达系统的采集软件具有较好的增益控制、实时显示和回拖定位功能,首先采取技术人员现场探测定位的解释方式。然后将采集的记录文件保存到计算机,再使用专业的处理软件进行编辑、零点校正、垂直带通滤波、去除背景波、线性增益、平滑增益等处理,形成后期解释用剖面图,并结合现场情况进行成果对比解释。
4.1. 管线的定位
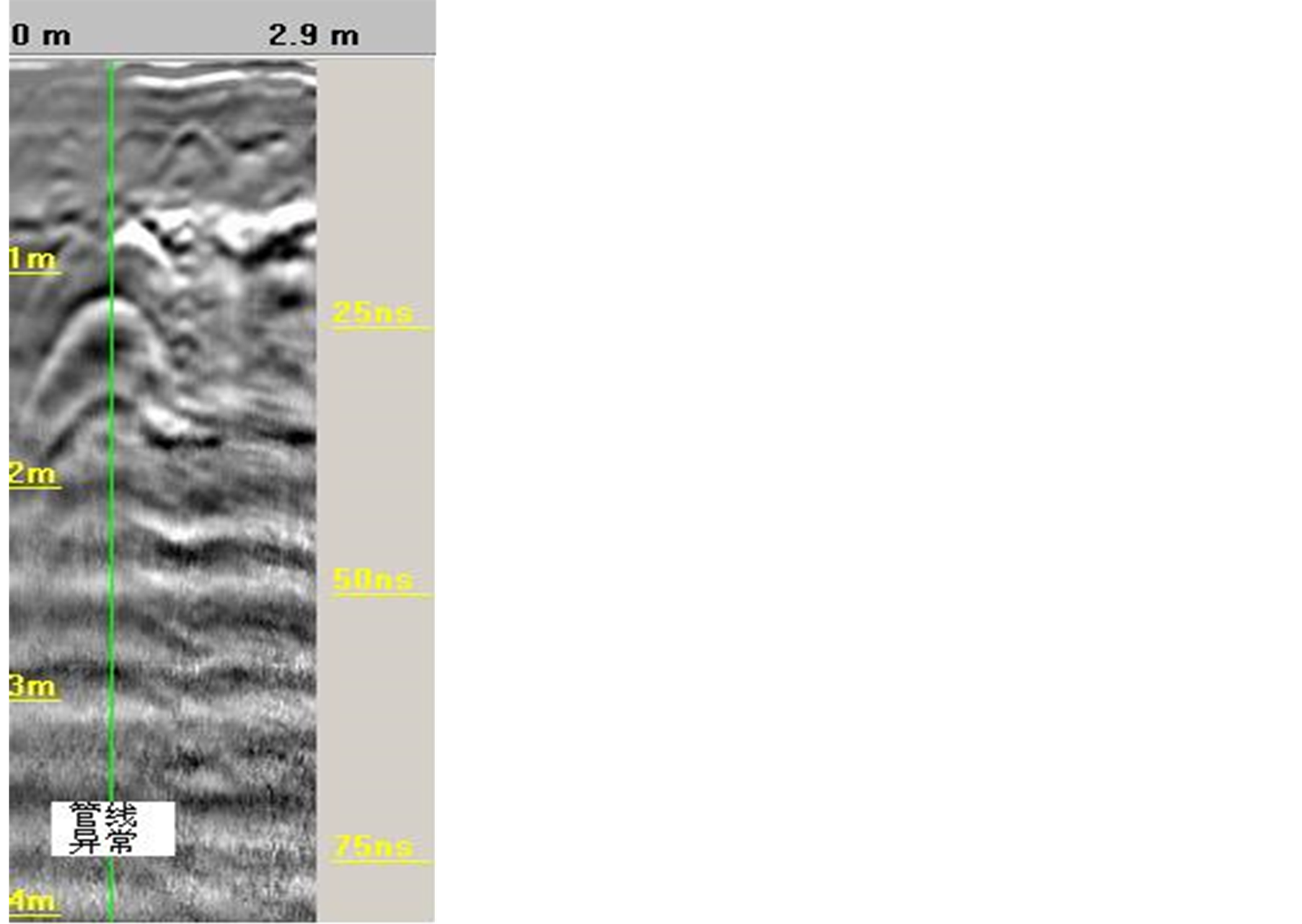
图2(a)/图2(b)是采用意大利IDS RIS K2探地雷达实测的地下管线典型剖面图资料,其异常的特征为双曲线。从雷达的反射剖面看,对管线有较高的分辨率和信噪比,可根据双曲线的顶点位置确定管线的平面位置和埋深。
4.2. 密集、复杂管线的区分、识别
对于管线铺设密集、复杂的情况,单一采用管线仪探测难以达到预期目的,此时可采用探地雷达探测。图2(b)为PVC给水管道(DN150, h = 1.02 m)与电力电缆(h = 0.61 m)中心间距为0.5米的雷达探测剖面。当使用管线仪从给水管的分支管(DN100,铸铁)采用直连法探测时,由于该段PVC管无电磁信号,故极易将电力电缆的信号误认为水管的信号,导致错误的探测结果。但采用雷达探测后,就能够将它们识别、区分开来。
 (a)
(a)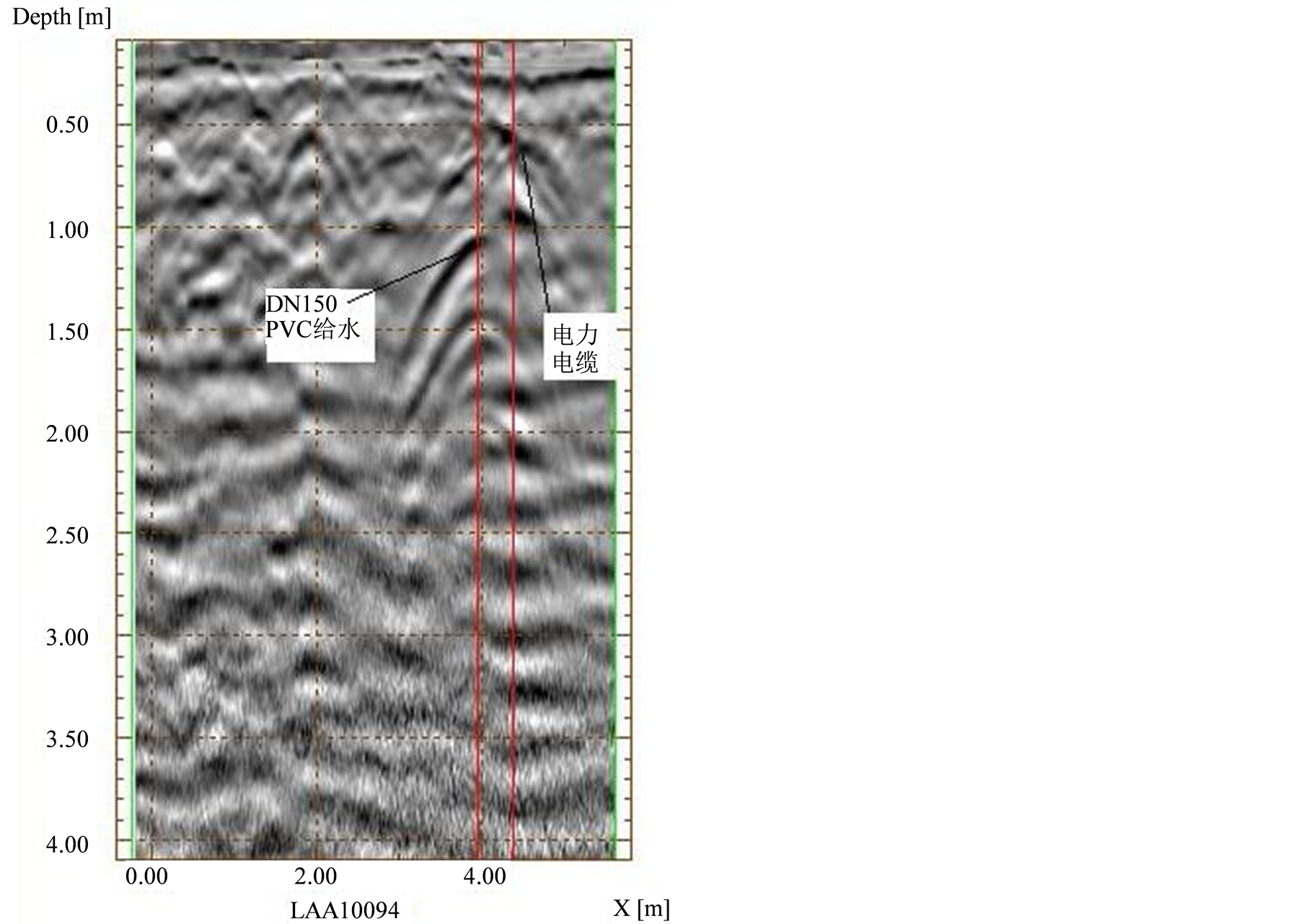 (b)
(b)
Figure 2. (a) Typical profile (b) The distinction between dense pipeline detection section
图2. (a) 典型剖面图 (b) 密集管线的区分探测剖面
4.3. 管线深度计算
根据雷达的时间剖面,按以下公式可将时间转换为管线的顶深度:
式中:T-雷达反射波的双程旅行时间;
V-不同介质中的电磁波速度。
本测区初选的电磁波波速为0.10 m/ns。例如图2(a)中可按上公式计算出给水管道(DN150, PVC)的顶埋深h = 1.15 m。当与已知管线点的实际埋深出入大时,则对探测埋深校正。
5. 结论
由于探地雷达所接收到的信号十分复杂,迭加了电磁信号脉冲在通过地下各个介电常数变化的界面时的反射;传播过程中,信号被吸收衰减,波形和波幅也发生较大的变化,此时如果覆盖层中有其它的积杂物,则会使雷达波的反射变得紊乱、无条理,不易准确判断管线的位置和埋深。因此在探测过程中,对情况复杂的地段,要采用多次重复探测、调试多种参数、平移探测剖面等手段,以确保探测工作的精度。
探测过程中,虽然是根据已知管顶埋深的下水砼管作了电磁波波速的测定,但在不同区域、不同路段,会因介质的电磁波速度差异,给最终判定管线的深度带来一定误差。还有,受地电条件的影响,雷达的探测深度有一定得局限性,对于埋深大的管线将无法探测到。