1. 引言
大规模GNSS基准站网数据处理一直是大地测量学及相关学科的一个研究重点。目前,大规模GNSS基准站网建设速度不断加快,不同规模的基准站网越来越多,基准站数目不断增加。其数据处理不仅需要高性能的计算机以及大量的时间,同时更为重要的是,目前大多数GNSS数据处理软件只能同时处理少于100个测站的数据(如GAMIT软件) [1] ,在同时处理200个及以上测站时消耗大量硬件资源与时间,严重影响数据解算的效率并导致解算结果滞后。
为了解决这一现实性难题,IGS各分析中心(如美国SIO等)采取将一个大规模GNSS基准站网分成若干个站数小于100的子网,首先各个子网独立解算,然后将各子网解联合处理,并得到最终解算结果的解算策略 [2] 。这样的处理方案是在面对日益增多的GNSS观测数据与有限的计算机硬件资源这一矛盾时的妥协,在数学模型的严密性上受到了影响,并增加了潜在的技术难点,主要有以下两点:
1) 子网划分问题。对于一个大规模GNSS基准站网,可以有多种子网划分方案,如何选取最优的子网划分策略,以及不同的子网划分方法对最终解算结果的影响,是需要考虑的一个技术难点。
2) 公共站选择问题。在划分子网时,为了最后将各个子网解联合,需要在子网间保留一定的公共站。选取几个公共站为佳、公共站的空间分布、公共站仪器的硬件要求等,需要在选择时加以考虑。
针对上述技术难点,本文利用IGS全球连续跟踪站的实际数据,通过不同子网划分、不同公共站选取方法进行处理并加以分析,研究子网划分及公共站选取对最终解算精度的影响,并给出了相应的建议。
2. 数据处理方案
数据处理采用高精度GNSS数据处理软件包GAMIT/GLOBK (10.35版本),该软件是全球最优秀的GNSS数据处理软件之一,我国A、B级GPS网的基线解算即采用GAMIT软件进行的 [3] [4] 。数据处理方案如表1所示。
待基线解算完毕后,采用GLOBK软件进行网平差。平差时将GAMIT解算得到的各天基线解作为输入文件进行整体平差,得到点位结果。

Table 1. Data processing program of sub-network division and common-station selection
表1. 子网划分与公共站选取数据处理方案
3. 方案设计及实例分析
3.1. 子网划分方案设计与结果分析
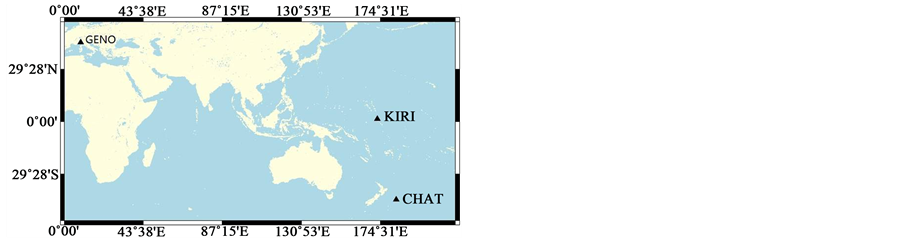
为了研究不同子网划分方案对大规模GNSS基准站网数据解算的影响,本文采用2009年5月2日~7日共计6天,由SIO划分的IGS1(43站)和IGS2(43站)子网数据,去除3个重复的公共站将其合并为拥有83个测站的整网(以下称为IGSA)。针对IGSA,本文设计了三种子网划分方案,连同IGSA整网解算方案,共有如下四种解算模式。方案一:IGSA整网解算,即不划分子网。方案二:按照SIO的原则划分为IGS1和IGS2两个子网,测站分布如图1(a)所示。方案三:自行设计的划分方案,将IGSA分为IGS1-1(46站)和IGS2-1(40站)两个子网,测站分布如图1(b)所示。本方案子网测站数基本一致,但改变了测站空间分布。方案四:自行设计的划分方案,将IGSA分为IGS1-2(62站)和IGS2-2(24站)两个子网,测站分布如图1(c)所示。本方案子网测站数以及测站空间分布均发生了改变。
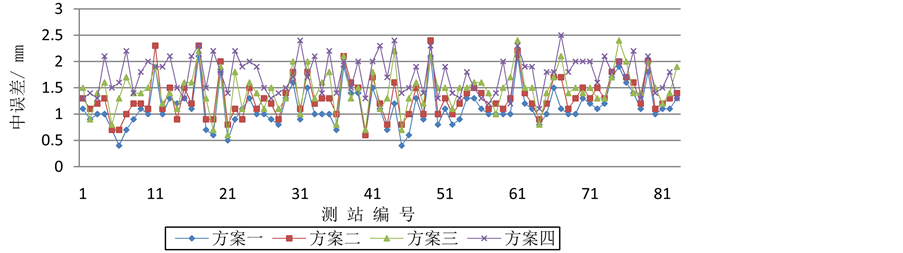
上述方案中,方案二~四中公共站均为CHAT、GENO、KIRI三站。为判定子网划分方式是否合理,本文采用比较各方案平差后的点位中误差以及平差后点位坐标与真实值的较差两方面来评判。由于实际中绝对真实值无法获取,本文以SOPAC发布的IGS站点在ITRF2005、2009.122历元的坐标成果为真值。由于方案一~方案四采取一致的处理策略,区别仅在于子网划分不同,因此,可以认为此时方案一~方案四之间的结果差异是由于不同的子网划分方法引起的。方案一~方案四平差后点位中误差如图2所示。
同时,以SOPAC发布的IGS站点坐标成果为真值,并将方案一~方案四平差的点位结果与之比较,得到的精度统计如表2所示。
由图2和表2可以看到,四种方案的点位中误差趋势大体一致,总的来说中误差较小,均优于5 mm;同时与真值的较差亦较小,各坐标分量统计精度均优于1 cm。具体来说,方案一(整体求解)的精度最高,方案二(SIO划分子网)精度与方案一接近但仍略低于方案一,方案三与方案四(自行划分子网)精度较方案一、二为低。虽然四种方案点位中误差的差异数值不大,但足以反映整体求解(方案一)的精度优势。
比较方案二~四这三种子网划分方案,均将同一个大规模GNSS基准站网划分为2个子网,子网间的


 (a) (b) (c)
(a) (b) (c)
Figure 1. Sites distribution of different sub-network division methods. (a) scheme two; (b) scheme three; (c) scheme four
图1. 子网划分各方案测站分布图。(a)方案二;(b)方案三;(c)方案四


 (a)(b) (c)
(a)(b) (c)
Figure 2. Mean square error diagram of different sub-network division methods. (a) The direction of X; (b) The direction of Y; (c) The direction of Z
图2. 子网划分各方案点位中误差示意图。(a) X方向;(b) Y方向;(c) Z方向
Table 2. Precision statistics table of different sub-network division methods
表2. 子网划分各方案多天解精度统计表(mm)
公共站也相同。但在子网测站的数目及测站的空间分布上,方案二中2个子网的测站数目一致(均为43站),测站分布也大体一致,空间分布较为均匀。方案三中2个子网的测站数目大体一致(46站与40站),但测站的分布不均匀:IGS1-1中的测站位于欧洲及美洲,而IGS2-1中测站位于非洲、南极及亚太地区,2个子网测站分布重叠区域较小。方案四则更加特殊,不仅测站数目相差较大(62站与24站),子网测站的空间分布也很不均匀:IGS1-2子网测站均位于北半球而IGS2-2子网测站均位于南半球,两个子网间基本没有重叠区域。因此,从这个角度来说,SIO划分的子网(方案二)是一种较合理的划分子网方式,而方案三、四的划分方式则是较不合理的。同时也可以看到,当子网划分合理时,精度与整体解算的结果基本一致。
3.2. 公共站选取方案设计与结果分析
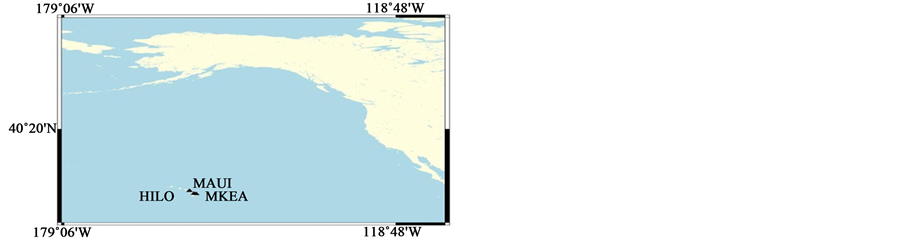
为了研究选择不同的公共站会对大规模GNSS基准站网数据处理带来的影响,本文采用2009年5月2日~7日连续六天的IGS连续运行跟踪站观测数据,采取SIO划分的子网IGS1和IGS2,通过对公共站的不同选取,设计了如下四套方案。方案一:SIO的选取方式,公共站为CHAT、GENO、KIRI三站,分布如图3(a)所示。方案二:自行选取公共站,为MAUI、MKEA、HILO三站,分布如图3(b)所示。方案三:自行选取公共站,为MAUI、GENO、CHAT三站,分布如图3(c)所示。方案四:自行选取公共站,为GENO、CRAO、SULP三站,分布如图3(d)所示。
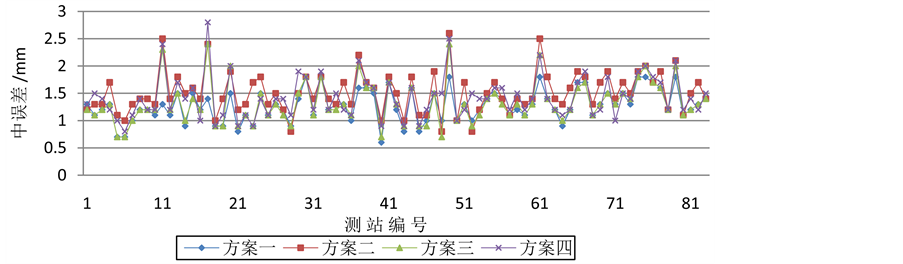
方案一~方案四采取一致的数据处理策略,区别仅在于公共站选取不同,因此,可以认为此时方案一~方案四之间的结果差异是由于不同的公共站选取方法引起的。方案一~方案四平差后点位中误差如图4所示。
同时,以SOPAC发布的IGS站点坐标成果为真值,并将方案一~方案四平差的点位结果与之比较,得到的精度统计如表3所示。
由图4和表3,可以看到四种方案精度均较高,点位中误差优于5 mm,与真值较差优于1 cm。其中,方案一的精度最高,方案三与方案一的精度大体一致,方案四精度略差,而方案二的RMS值最高,特别在X方向与方案一相比RMS值增加了约2 mm,同时方案二的点位中误差也最高。结合图3,可以发现,方案一和方案三选取的公共站在全球范围内均匀分布,而方案二和方案四选取的公共站分布上较为集中:方案二的公共站均位于夏威夷群岛,而方案四的公共站均位于欧洲南部。可以认为,方案一选取的公共站较为合理,而类似方案二选取的公共站则较不合理。不合理之处主要在于其选取的公共站过于集中,无法很好地将两个子网联结起来;同时可以看到,方案三与方案一的差别在于将KIRI站换成了MAUI站,虽然MAUI站同样位于北半球,但由于三个公共站之间分布较为均匀,因此得到了与方案一相一致的解算结果。
 (a) (b)
(a) (b)
 (c) (d)
(c) (d)
Figure 3. Sites distribution of different common-station selection methods. (a) scheme one; (b) scheme two; (c) scheme three; (d) scheme four
图3. 公共站选取各方案测站分布图。(a)方案一;(b)方案二;(c)方案三;(d)方案四
Table 3. Precision Statistics table of different common-station selection methods
表3. 公共站选取各方案多天解精度统计表(mm)
4. 子网划分与公共站选取的一般性原则
关于如何在整体平差时进行子网划分,国内已有学者进行研究并得出了相关结论 [5] - [10] 。但已有的研究成果基本是针对某一特定工程而进行的,缺乏一般性,同时对于如何选取子网间的公共站也没有进行论述。更为重要的是,已有的研究成果主要是针对由不同时期施测的会战式GPS网组合而成的大规模网数据情况,特别是1998年之前早期观测的GPS数据中粗差较多、数据质量较弱的情况而提出的,与现在正在迅速建设的大规模GNSS基准站网的特点并不一致。
为此,针对大规模GNSS基准站网的自身特点,根据本文的研究结果,提出子网划分与公共站选择的一般性原则如下:
1) 划分子网时,应尽量保证各个子网间的测站数目基本一致,避免出现子网间测站数目过于悬殊的情况。
2) 划分子网时,应保证各子网的空间分布具有一定的重叠性,仅以地域来划分子网并非最优方式。


 (a)(b) (c)
(a)(b) (c)
Figure 4. Mean square error diagram of different common-station selection methods. (a) The direction of X; (b) The direction of Y; (c) The direction of Z
图4. 公共站选取各方案点位中误差示意图。(a) X方向;(b) Y方向;(c) Z方向
3) 划分子网时,应考虑各子网中测站的分布以较为均匀为佳,避免出现部分子网测站过密、而其他子网测站过于稀疏的情况。
4) 选取公共站时,应考虑公共站的空间分布。公共站应在子网内均匀分布为佳,应避免公共站集中于某一区域的情况;沿子网间的边界选取公共站并非最优选择。
5) 选取公共站时,应注意公共站的数据质量,有明显质量缺陷的测站不应作为公共站。
6) 选取公共站时,公共站的数目并非越多越好,一般情况下选取三个公共站已经足够。
5. 结论
由以上的实验结果和分析,不难得出如下结论:
1) 大规模GNSS基准站网的数据处理,先划分子网单独处理,然后将基线解联合平差得到最终结果是一个行之有效的手段;
2) 分子网解算时,子网划分和公共站选取是能够影响解算精度的重要问题,不同方法会对结果造成不同程度的影响;
3) 当子网划分及公共站选取较合理时,分子网求解与全网整体求解的结果大体一致;反之解算精度则可能会有一定程度的降低;
4) 全网整体处理策略由于不需要划分子网和选取公共站,因此可以避免由于子网划分或公共站选取不当带来的不必要的精度损失,但对处理能力提出了新的要求。