1. 引言
在工业生产中,脉冲和时滞是普遍存在的现象,如:信号传输、电力输送、人造卫星轨道变换。脉冲时滞系统既反映了过去状态对当前状态的影响,也反应了由脉冲产生的跳变现象。另一方面,实际系统的参数在扰动或其它因数的影响下会发生变化,从而使系统响应不能达到预期的要求,甚至出现不稳定,因此要求系统对不确定参数具有一定的鲁棒性.近年来,人们对脉冲系统或时滞系统的研究取得了较多的成果。文献 [1] [2] [3] [4] 研究了脉冲系统的 控制问题,文献 [5] [6] [7] [8] [9] 研究了不确定系统的时滞稳定性问题,然而有关不确定线性脉冲时滞系统的研究却很少。
控制问题,文献 [5] [6] [7] [8] [9] 研究了不确定系统的时滞稳定性问题,然而有关不确定线性脉冲时滞系统的研究却很少。
相对于连续时间脉冲时滞系统,离散系统研究较少,目前离散时间脉冲时滞系统的稳定性分析主要集中在时不变Lyapunov函数的方法,如: [4] [6] 。利用该方法研究没有充分利用脉冲区间长度信息,得到的稳定性条件具有一定的保守性。本文引入时变Lyapunov函数,利用凸组合技术、线性矩阵不等式及相关稳定性理论,研究了不确定线性离散脉冲时滞系统的鲁棒稳定性问题及脉冲状态反馈控制器的设计方法。最后,通过一个数值实例验证了结果的有效性。
2. 问题描述
本人用到的记号:对给定的实对称矩阵 ,表示:M为正定(半正定,负定,半负定)矩阵。
,表示:M为正定(半正定,负定,半负定)矩阵。 表示合适维数的单位矩阵。
表示合适维数的单位矩阵。 表示对称矩阵M的最大(最小)的特征值。
表示对称矩阵M的最大(最小)的特征值。 表示
表示 的欧拉范数,
的欧拉范数, 。任意的两个整数
。任意的两个整数 ,定义
,定义 ,及
,及 。
。
考虑如下离散线性系统:
 (1)
(1)
其中 是状态变量,
是状态变量, 是脉冲控制输入,
是脉冲控制输入, 为系统状态在脉冲时刻
为系统状态在脉冲时刻 的跳变。脉冲时间序列
的跳变。脉冲时间序列 ,满足
,满足 ,且
,且 。
。 为已知的参数矩阵,
为已知的参数矩阵, 表示系统参数的不确定性,并具有如下结构:
表示系统参数的不确定性,并具有如下结构:
 ,
,  ,
, 
其中, 为已知的常值矩阵,
为已知的常值矩阵, 为具有适合维数的不确定矩阵,且满足:
为具有适合维数的不确定矩阵,且满足:
 ,
,  ,
, 
本文的目的是对给定的脉冲时间序列 ,设计脉冲状态反馈控制律
,设计脉冲状态反馈控制律 ,使闭环系统
,使闭环系统
 (2)
(2)
的零解是鲁棒指数稳定的。
定义1 系统(1)是鲁棒指数稳定的,如果存在常数 ,使得
,使得

引理1 [8] 对任意 和正定矩阵
和正定矩阵 ,及正数
,及正数 ,则有:
,则有:

引理2 [10] 设矩阵 ,
, ,
, ,
, ,及常数
,及常数 ,且
,且 ,对任意矩阵
,对任意矩阵 ,下列矩阵不等式成立:
,下列矩阵不等式成立:

引理3 [11] 设矩阵 ,且
,且 ,则对任意的正数
,则对任意的正数 ,有
,有

引理4 (Schur补引理)对给定的 ,以下三个条件等价:
,以下三个条件等价:
1) ;
;
2) ;
;
3) 。
。
3. 主要结果
本文引入时变Lyapunov函数的方法建立系统(1)的鲁棒镇定条件。为此,我们先定义一些关于脉冲时间序列的离散函数。
给定的脉冲时间序列 ,定义线性分段函数
,定义线性分段函数
 (3)
(3)
易见,
 .(4)
.(4)
 . (5)
. (5)
其中, ,
, ,
, 。对任意的
。对任意的 ,令
,令

注意到
 ,
,  ,
, . (6)
. (6)
记 ,
, 。
。
定理1 对给定的矩阵 ,脉冲序列
,脉冲序列 ,其中
,其中 及标量
及标量 ,
, ,若存在对称矩阵
,若存在对称矩阵 ,及标量
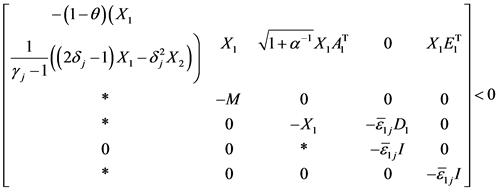
,及标量 使得下列矩阵不等式成立:
使得下列矩阵不等式成立:
 ,
, (7)
(7)
 ,
, (8)
(8)
 (9)
(9)
则系统(1)的零解是鲁棒指数稳定的。
证明:定义 为式(7),
为式(7), 为式(8),于是
为式(8),于是 ,
, ,即:
,即:
 ,
, . (10)
. (10)
 ,
, (11)
(11)
式中 ,
, ,对(10),(11)应用Schur补得到:
,对(10),(11)应用Schur补得到:
 (12)
(12)
 (13)
(13)
对(9)运用Schur补得到
 (14)
(14)
选取时变Lyapunov函数 ,由(5)得,
,由(5)得, ,有
,有
 (15)
(15)
记 ,
, 。
。 根据引理1-3及(2)有:
根据引理1-3及(2)有:

所以,对 ,有:
,有:
 (16)
(16)
下面估计 ,
, ,由(2),(14)得:
,由(2),(14)得:
 (17)
(17)
综合(16),(17)得:
 ,
, (18)
(18)
注意到 ,则
,则
 ,
, (19)
(19)
因此,由(18),(19)得: ,
,
其中, ,
, ,由定义1系统(2)的零解是鲁
,由定义1系统(2)的零解是鲁
棒指数稳定的。
推论1 给定的矩阵 ,脉冲序列
,脉冲序列 ,及标量
,及标量 ,
, ,若存在对称矩阵
,若存在对称矩阵 ,及标量
,及标量 使得下列矩阵不等式成立:
使得下列矩阵不等式成立:
 (20)
(20)
 (21)
(21)
 (22)
(22)
则系统(1)的零解是鲁棒指数稳定的。
证明:令 ,
, ,
, ,由定理1成立,于是推论1得证。
,由定理1成立,于是推论1得证。
下面定理给出了脉冲反馈增益矩阵 的设计方法。
的设计方法。
定理2 对给定的脉冲序列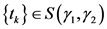 ,其中
,其中 及标量
及标量 ,
, ,若存在对称矩阵
,若存在对称矩阵 ,及标量
,及标量 使得下列矩阵不等式成立:
使得下列矩阵不等式成立:
 ,
, (23)
(23)
 ,
, (24)
(24)
 ,
, (25)
(25)
 . (26)
. (26)
相应的脉冲状态反馈增益矩阵为 时,则闭环系统(2)的零解是鲁棒指数稳定的。
时,则闭环系统(2)的零解是鲁棒指数稳定的。
证明:令 ,
, ,
, ,
, ,
, ,
, ,在式(23)两边分别乘
,在式(23)两边分别乘 ,在式(24)两边分别乘
,在式(24)两边分别乘 ,在式(25)两边分别乘
,在式(25)两边分别乘 ,在式(26)两边分别乘
,在式(26)两边分别乘 ,利用引理2和引理4,即可得(7),(8),(9),因此,当
,利用引理2和引理4,即可得(7),(8),(9),因此,当 时,由定理1,闭环系统(2)的零解是鲁棒指数稳定的。
时,由定理1,闭环系统(2)的零解是鲁棒指数稳定的。
4. 数值例子
考虑系统(1),其中系统参数为:
 ,
,  ,
,  ,
,  ,
,
 ,
,  ,
,  ,
,  ,
,  .
.

Figure 1. The evolution curve of system state under impulsive control law
图1. 系统状态在脉冲控制律作用下的演化曲线
不确定项 ,
, ,
, 。不妨取
。不妨取 ,
, ,
, ,
, ,
, ,
, ,
, ,应用定理2可得相应的脉冲状态反馈控制器
,应用定理2可得相应的脉冲状态反馈控制器 ,图1给出在此脉冲控制器的作用下,取初始值
,图1给出在此脉冲控制器的作用下,取初始值 ,系统的演化曲线。仿真结果显示,系统(1)在该脉冲控制器的作用下,其状态指数收敛于零。
,系统的演化曲线。仿真结果显示,系统(1)在该脉冲控制器的作用下,其状态指数收敛于零。
基金项目
(2013LX148)积分不等式在脉冲和随机微分方程中的应用。
(KY2015YB280)脉冲作用下神经网络的同步设计与多稳定性研究。
(2014KB03)脉冲作用下动态网络的多稳定性研究。