1. 引言
随着互联网技术与数字化的飞速发展,以及电子数码产品的普及,人们能够获取的数字图像数据已经越来越多 [1] 。图像作为一种表现直观、内容丰富的多媒体信息,在各行各业中也得到越来越广泛的应用,如数字多媒体图书馆、医学图像应用管理、卫星遥感图像等 [2] 。目前,图像处理方法的重要性源于两个主要应用领域:改善图示信息以便人们解释;为存储、传输和表示而对图像数据进行处理,以便于机器自动理解。
图像特征提取是自动识别图像的基础。获得高效的图像不仅可以降低计算复杂度,还可以准确地表述图像的原始信息 [3] 。目前,常用的图像底层特征包括颜色、纹理和形状等。此外,新颖合适的图像特征提取方法对别的领域如人工智能、模式识别等也会有一定的促进作用。因此,如何有效的提取低层视觉特征成为基于内容的图像识别中很关键的一个步骤,也成为图像识别领域研究的热点内容。
图像理解与智能视频技术的不断发展,对室外环境下各种天气现象,尤其是恶劣天气的现象的检测与识别提出了极为迫切的需求,同时在气象领域,对于天气现象的观测仍然依靠人工观测,天气现象信息的采集耗费了大量的人力物力,近几年来基于室外图像与视频数据的天气现象自动识别研究受到了较为广泛的关注 [4] 。
目前,计算机视觉领域中的大多数现有方法都是基于户外图像或视频中的天气明确的假设 [5] 。然而,不同的天气条件如雨,雪或烟雾会降低图像或视频的质量。这种影响可能会显著降低依赖于图像/视频特征提取或视觉注意建模的户外视觉系统的性能。因此,天气分类的应用很多,如天气条件的检测和观察,图像/视频分析,视频监控系统的可靠性改进。
本文基于光学图像处理技术,对晴阴雨雪气象的天气特征进行了提取并研究,为天气现象的自动观测提供光学技术、方法和手段。
2. HSV空间模型
HSV模型在1978年由埃尔维·雷·史密斯创立。
HSV色彩模型从CIE三维颜色空间演变而来,它采用的是用户直观的色彩描述方法,它跟孟塞尔显色系统的HVC球型色立体较接近 [6] 。只不过HSV色彩模型是一个倒立的六菱锥,只相当于孟塞尔球型色立体的一半(南半球),所以不含黑色的纯净颜色都处于六菱锥顶面的一个色平面上 [7] 。在HSV六菱锥色彩模型(如图1)中,色相(H)处于平行于六菱锥顶面的色平面上,它们围绕中心轴V旋转和变化,红、黄、绿、青、蓝、品红六个标准色分别相隔60度。色彩明度(B)沿六菱锥中心轴V从上至下变化,中心轴顶端呈白色(V = 1),底端呈黑色(V = 0),它们表示无彩色系的灰度颜色。色彩饱和度(S)沿水平方向变

Figure 1. Hexagonal cone color model diagram
图1. 六菱锥色彩模型图
化,越接近六菱锥中心轴的色彩,其饱和度越低,六边形正中心的色彩饱和度为零(S = 0),与最高明度的V = 1相重合,最高饱和度的颜色则处于六边形外框的边缘线上(S = 1) [8] 。
HSV模型通常用于计算机图形应用中。在用户必须选择一个颜色应用于特定图形元素各种应用环境中时,经常使用HSV色轮(如图2)。在其中,色相表示为圆环;可以使用一个独立的三角形来表示饱和度和明度。典型的,这个三角形的垂直轴指示饱和度,而水平轴表示明度。在这种方式下,选择颜色可以首先在圆环中选择色相,在从三角形中选择想要的饱和度和明度。
HSV模型的另一种可视方法是圆锥体(如图3)。在这种表示中,色相被表示为绕圆锥中心轴的角度,饱和度被表示为从圆锥的横截面的圆心到这个点的距离,明度被表示为从圆锥的横截面的圆心到顶点的距离。某些表示使用了六棱锥体。这种方法更适合在一个单一物体中展示这个HSV色彩空间;但是由于它的三维本质,它不适合在二维计算机界面中选择颜色 [9] 。
HSV色彩空间还可以表示为类似于上述圆锥体的圆柱体,色相沿着圆柱体的外圆周变化,饱和度沿着从横截面的圆心的距离变化,明度沿着横截面到底面和顶面的距离而变化 [10] 。这种表示可能被认为是HSV色彩空间的更精确的数学模型;但是在实际中可区分出的饱和度和色相的级别数目随着明度接近黑色而减少。此外计算机典型的用有限精度范围来存储RGB值;这约束了精度,再加上人类颜色感知的限制,使圆锥体表示在多数情况下更实用 [11] 。
3. K-邻近分类算法
K-邻近分类算法可以解释为有那么一堆已经知道分类的数据,然后当一个新数据进入的时候,就开始跟训练数据里的每个点求距离,然后挑选这个训练数据最近的K个点看看这几个点属于什么类型,然后用少数服从多数的原则,给新数据归类(如图4) [12] 。
最近邻分类的解释是:令
,其中每一个样本
所属的类别均己标记。对于参数样本点x,在集合
中距离它最近的点记为
那么最近邻分类规则就是把点x分为
所属的类别 [13] 。
4. 基于HSV空间模型和K-邻近分类算法实验
4.1. 图像HSV模型的建立
在图像分类的过程中,我们之所以选择提取图像的主要特征,是因为直接处理原始图像得到的向量

Figure 4. K-nearest neighbor classification algorithm diagram
图4. K-邻近分类算法示意图
维度不易分类。因此,提取图像的主要特征就成为了图像分类的关键。实际来讲,HSV分类是从两类问题的分类所提出的,但是现在我们所要做的工作是对多类图像进行分类,这就需要将两类的问题扩展到多类 [14] 。本文要通过三种特征将图5中四种天气图像分类。
表1反应了四种天气H、S、V三个通道的特征数据情况,其中H_avg表示色调均值;H_var表示色调标准差;S_avg表示饱和度均值;S_var表示饱和度标准差;V_avg表示亮度均值;V_var表示亮度标
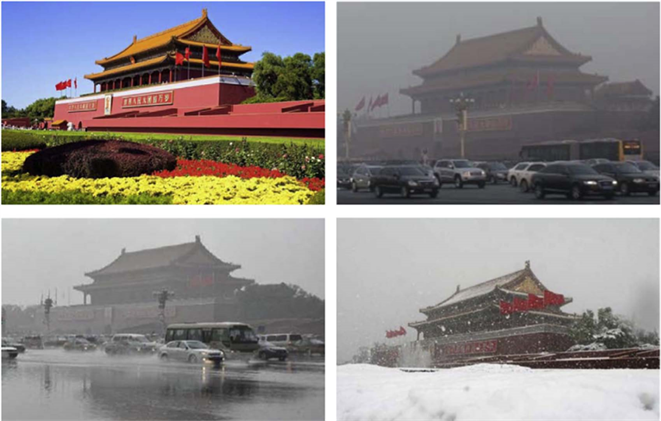
Figure 5. Four kinds of weather including sunny, cloudy, rainy and snowy
图5. 晴、阴、雨、雪四种天气图

Table 1. Classification results of HSV
表1. HSV分类结果
准差。本文共采用了800张天气图像,其中晴、阴、雨、雪四种天气中每类天气图像各200张用来提取图像特征,建立分类器,即四种天气已知样本库,分类结果如表1。
4.2. k = 1与k = 3时邻近法的比较
在4.1建立四种已知天气样本库的基础上,选取晴、雨、阴、雪四种天气图像各200张作为待识别图像样本库,经图像识别,k = 1时分类结果如表2,k = 3时分类结果如表3。
从实验结果来看,当k = 1时晴天的正确识别率最高,到达85%,雨天的正确识别率最低,为65%。k = 3时晴天的正确识别率最高,到达80%,雨天的正确识别率最低,为62%。可见k = 1比k = 3时的天气正确识别率要高。但是,从人们视觉的直观感受来看,阴天图像与雪天图像整体上都呈现白色,两种天气的亮度和饱和度大致相同,因此,无论是k = 1的情形还是k = 3的情形都存在将阴天天气错判为雪天天气的情况。
5. 结论
基于光学图像的天气识别技术是当前研究比较热门的领域,涉及了计算机视觉、模式识别、图像处
Table 2. Weather recognition rate when k is 1
表2. k = 1时的天气识别率
Table 3. Weather recognition rate when k is 3
表3. k = 3时的天气识别率
理、分类聚类分析等众多方面的技术 [15] 。基于HSV空间模型和K-邻近分类算法识别是本文的主要研究内容:
1) 利用HSV色彩分析法并结合近邻方法对图像进行比较归类,较为准确的对图像进行了自动识别,达到了预期的目的;
2) 在特征提取后,我利用K-NN对待识别检测图像进行了识别检测,检测正确率普遍为70%左右,准确度有待进一步提高;
3) 图像识别技术作为当前比较热门的专业,应该有很多的研究方法,因此可进一步拓宽研究渠道,进而增加图像识别的准确率。
该研究成果可以应用于天气条件的检测和观察,图像/视频的分析,视频监控系统的可靠性改进等方面。