1. 引言
随着近年来智慧农业和精准农业等概念的提出,农事劳动强度的减轻与资源的合理利用在农业生产中也逐渐推广起来。如何推进我国农业资源合理应用与发展,成为了当下社会关注的热点之一。2016年中央1号文件提出,发展农业现代化,必须着力于强化物质装备及技术支撑,重点突破农机装备、智能农业等领域的关键技术,故在枸杞生产过程中实现机械化施肥有重大意义 [1] 。
我国施肥机械研究起步相对欧美国家较迟,虽然在政府政策的大力支持下,大田主要粮食作物已基本实现机械化施肥,但是在果园施肥机械的研发方面仍然比较欠缺,仍以人工撒施为主。随着枸杞市场逐渐扩大,推进机械化施肥,提高生产效率刻不容缓 [2] 。
枸杞的传统的有机肥施肥是开沟、施肥、覆土三个流程分开操作,人工施肥,这样就会耗费大量的人力、物力且效率低下。针对这种情况,枸杞现有种植模式下的开沟施肥覆土一体化有机肥深施作业机械设计,实现双侧可切换的开沟施肥覆土机构,可以实现高效开沟、精准施肥和全面覆土作业。
2. 研究分析方案
研究内容需满足宁夏科技厅与产业基地的需求,以科技研发为支撑,已解决我国农业现存的实际利益问题为根本,实现开沟施肥覆土一体化智能农机设备,达到功能实现与整机参数要求,以及相应的论文专利要求,对于农业产业的发展迫不及待,对于项目研究与技术突破存在重大意义。
设计方案的构思(图1)。
针对枸杞现有种植模式下的双边可切换式开沟施肥覆土一体化有机肥深施作业机械设计的研究路线设计(图2)。
3. 结构设计
本设计枸杞施肥机主要包括悬挂机构,开沟部分,施肥部分,覆土部分,传动系统和机架等几大部分。采用后置式与拖拉机之间标准三点悬挂,动力来源为拖拉机输出动力。整体机架设计采用平衡支撑式,A点万向节单点悬挂与双边开沟机构相连接,连接与开沟设备上,a下料有b导流至c,后节覆土装置 [3] (图3)。
传统的枸杞种植模式基本为行距2 m,株距1.5 m,而目前种植规模正向集约化发展为行距3 m株距1 m [4] ,而整机的长宽高参数为1900 × 1400 × 2000,能够满足在枸杞中开沟施肥作业的尺寸要求。
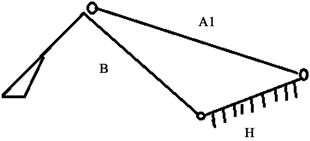
在拖拉机沿直线运动如图4(a)所示,无论是否工作,都可以保持各部分连接的稳定性、互不干涉性;转弯状态如图4(b),在作业基地的有限的空地中,实现转弯的高效性与互不干涉,必须满足在结构设计和传动设计,以及连接处的复合型。犁与拖拉机刚性连接,犁随着拖拉机转动;连接杆与犁架是通过可活动的插销连接的,随着拖拉机的转弯以及转弯角度的增加,拖拉机带着的犁与后面的施肥车会产生
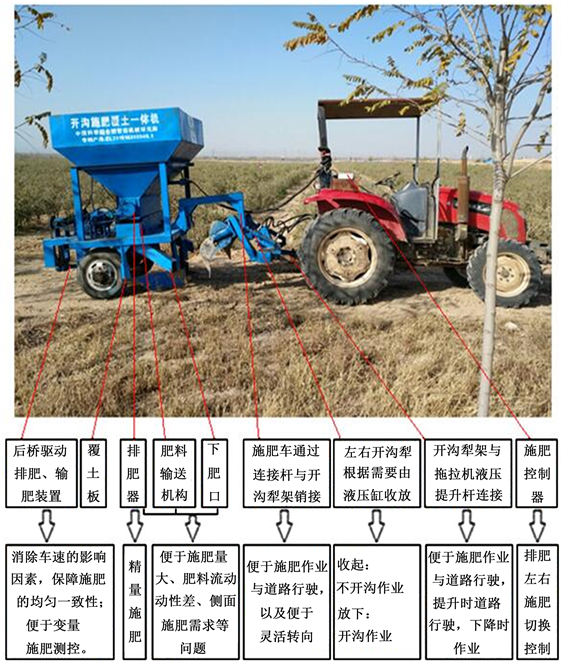
Figure 1. Overall structure illustration
图1. 整体结构说明图
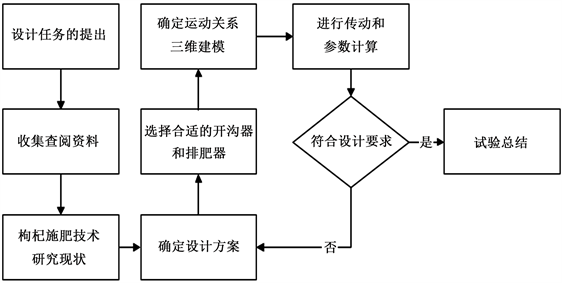
Figure 2. Research the technology roadmap
图2. 研究技术路线图
 (a)
(a) 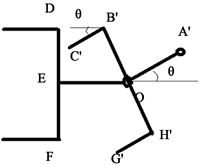 (b)
(b) 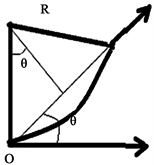 (c)
(c)
Figure 4. Limit size analysis for suspension parts
图4. 悬挂部分的限制尺寸分析
相对运动,在转弯过程中,销所受的作用力在结构与材料的可控范围之内,连接所受的合力
,故满足力与强度的要求。相对运动则如图所示,图4(a)是在直线运动情况,图4(b)是转弯时的状态,图4(c)则是转弯半径与转弯状态 [5] 。
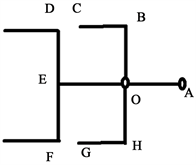
假设地面平整。施肥车质量分布是纵向轴对称的,在转弯时,满足最小的转弯半径,且在犁和后车不干涉的情况下,连接杆最短,其尺寸限制如下所示:
图中后悬挂杆OA与犁架BH垂直且刚性连接,犁装置BC、GH与BH之间垂直,OE连杆的距离是:
旋转角:
(R是转弯半径);
范围是:
为了保证R最小,这里取L的最小值(表1)。
4. 关键部分的力学分析
开沟犁是由后悬挂液压装置牵引,在运动过程中,根据开沟的深度与自身的倾斜角度,产生不同的受力效果和开沟翻土效果,具体分析如下:
图5中的(a)是开沟犁在液压缸的收缩时,未进入工作状态的情形;图5中的(b)则是液压缸的扩张时,进入工作状态的情形;
 (a)
(a) 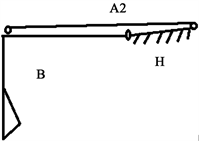 (b)
(b)
Figure 5. Unilateral analysis of furrow plough on both sides: State (a) and state (b)
图5. 两边开沟犁的单侧分析的状态(a)和状态(b)
表1. 整机参数
在施肥运动过程中,
即运动方程。
在开沟切土过程中,抛土阻力与抛土刀的线速度的平方成正比。这是一个不容忽视的量,根据农艺要求,开沟覆土距离为单侧1.5~2m,按抛土角呈45˚斜上抛计算线速度 [6] :
式中:l:单侧抛土距离;g:重力加速度;T:抛撒角 [7] 。
受到来自地面土壤的阻力
可表示为 [8] :
式中:
为土壤坚实度冲击值,参照沙土地的土壤坚实度冲击值取为6,
为刀片的厚度(mm),φ为刀片的切削角(˚),
为刀片尖角计算系数,带入数据得
为了满足强度要求,材料按国标选择为65 Mn,锻压成型刀身部分热处理硬度HRC为48~54,金相组织为回火马氏体,且刀身平整,无内外裂纹 [9] 。
行驶单趟的时间为:
,
每秒需排肥量为:
排肥轮每转的排肥量按下式计算:
(1)
式中:F为星轮每单个齿槽面积为14.454 (cm2);
为星轮齿厚(cm);
h活门开度(cm);
α为肥料充满系数一般为0.7;
z为星轮槽数设计为6;
γ为肥料的密度,取720 g/L。
带入数据到(1)中计算得
在综合考虑枸杞对肥量的要求以及整体机械机构尺寸、性能需求,即可得到排肥轮设计参数 [10] 。
5. 对关键部分的有限元分析
从上部分对开沟部件的受力分析,进行有限元仿真,进一步分析所受载荷对其的应力应变分布,这里取单侧犁,双侧的受力情况是相同的:
材料设置,室温下(22˚),弹性模量210 GPa,泊松比0.269,材料密度,7850 kg/m3材料参数。
其中网格划分影响其计算精度,这里选sizing为1,如图6。
通过对其中的连接部分进行固定,添加相应的约束,与此同时,对载荷施加在相应的位置,施加均匀载荷,此时FS取360 N,应力、应变图如下图7~9。
从结果可以看出,当施加载荷为360 N时,犁的总形变为0.21687 mm,数值较小,符合设计要求,最大等效应力为16.387 Mpa,最大分布应力为17.563 Mpa,而螺旋轴的材料选择是为合适的材料其屈服应力为σs,按软件分析数据校核或第三第四强度理论校核应大于分析结果,以满足在强度方面设计合理
6. 传动设计
枸杞施肥机分为动力输入部分,传动机构部分,和开沟施肥机构部分。开沟器的动力来自于牵引机械的输出动力,第二部分施肥机构的动力来自于地轮,通过链条传动来传输动力到十字转向器,分别在两个方向上输出动力驱动送肥皮带轴的转动和排肥轴的转动,离合器电控开沟犁的左右单侧开沟,并且实现在传动上的左右两侧随意切换的施肥方式 [11] 。
以齿轮链轮传动,50马力拖拉机在施肥过程中正常行驶速度和地轮尺寸的大小,预算地轮的转速在100~120 r/min,参照机械设计链传动相关章节 [12] ,取传动比
,公式
,差速包减速比5.86,实现最终地轮与排肥轴的传动比是1:0.75 (图10)。
7. 优势分析
本研究的优势在于首次实现了开沟施肥覆土的功能组合实现,完成了双侧精准施肥,在智能化、精准化、可靠化的性能指标上均实现了新的突破,有利于精准农业的推广;但是,由于种植模式的限制,是施工作业在空间紧凑感上,需要进一步改进,在更小的空间上具有高度的灵活性与高度可控性。
8. 试验验证
在应对变化相对较大的工作条件与工作环境下,实际试验车速1.2 m/s,每秒需排肥量0.4 Kg/s,实现精准的开沟、施肥、覆土的功能,实际效果图如图11和图12所示。
基金项目
2015-2017年宁夏农业综合开发宁夏枸杞产业科技项目“枸杞绿色生产精准作业机械的研制”(编号znnfkj2015-04);中国科学院STS项目(KFJ-SW-STS-144)。
NOTES
*通讯作者。