1. 引言
17世纪初,Newton和Leibniz发明了微积分,同时也开创了微分方程的研究。1771年,Condorcet导出历史上第一个时滞微分方程,时滞微分方程就是时间滞后的微分方程,用于描述即依赖当前状态也依赖过去状态的微分方程。时滞微分方程所构建的时滞微分系统在现实世界中有着广泛的应用:经济系统、机械系统、计算机网络系统、制造系统等 [1] 。中立型时滞系统的研究起步较早,并且取得非常丰硕的研究成果。中立型时滞系统是存在于客观世界中的一种典型系统,时滞的存在是系统不稳定和性能变差的主要原因之一。因此,研究中立型时滞系统的稳定性是非常有必要的 [2] [3] 。文献 [4] 考虑用多积分的方法对中立型时滞系统进行研究,并且取得很好的结果。文献 [5] 中沈博士分别从“离散时变时滞”、“分布式时变时滞”、“非线性扰动和不确定时变时滞”和“离散延迟随时间变化”等几个方面对中立型时滞系统的稳定性进行深入考虑,并且取得了很好的结果。
中立型马尔科夫跳跃系统是一类特殊的中立型时滞微分系统,系统的转移概率由马尔科夫过程控制。由于此类系统能更好地描述且解决实际问题,故引起国内外很多专家和学者进行研究,并且取得了很丰硕的结果 [6] - [12] 。
本文考虑了一类中立型马尔可夫跳跃系统的随机稳定性问题。通过构造lyapunov函数,利用Jensen’s不等式对系统进行分析,获得满足随机稳定性的充分条件。
2. 系统描述
首先,考虑以下具有离散时滞和时变时滞的中立型马尔科夫跳跃系统
(1)
其中,
是状态向量,
,
是离散时滞,
是时变时滞。
且满足以下不等式
(2)
是已知常数矩阵,
在有限状态概率空间
中取值,
,具有以下性质
(3)
其中,
,对任意的
,
表示由t时刻的第i状态转移到
时刻的第j状态的概率,并且有
,状态转移概率矩阵为
(4)
其中
表示未知的状态转移概率,对于任意的
,集合
表示
,其中
此外,
是一个非空集,可以表示为
,其中
为非负整数,
表示在状态转移概率矩阵
中第i行第j列的已知元素。
3. 引理及结论
定义1 [13] :对于系统(1),若
时满足以下条件
(5)
则系统是随机稳定的。
引理1 [14] :(Ito’s lemma)若
,Lyapunov函数满足以下等式
(6)
则系统是稳定的。
引理2 [15] :(Jensen’s inequality)假设
和
,对于任意正定矩阵W有以下不等式成立
(7)
引理3 [16] :对于任意正定矩阵
,标量
,向量函数
可积时有以下不等式成立
(8)
为方便起见,有以下代替
定理1:若存在实对称矩阵
,适当维数的实矩阵
且
,则系统(1)是随机稳定的。
(9)
其中
证明:构造lyapunov函数
(10)
其中
由引理1可得
(11)
(12)
由引理2:(Jensen’s inequality),可得
(13)
由
可得
(14)
(15)
(16)
由(14)~(16)式,有以下不等式成立
(17)
(18)
从系统(1)可知
(19)
其中
综合(11)~(13)和(17)~(19)式,可得
其中
可得稳定性的充分条件
,即
(20)
证明系统(1)是随机稳定的。
其次,考虑以下具有时变时滞和分布时滞的中立型马尔科夫跳跃系统
(21)
推论1:若存在实对称矩阵
,适当维数的实矩阵
且
,则系统(21)是随机稳定的。
(22)
其中
证明:推论1的证明过程和定理1类似,但需要构造如下的lyapunov函数
由引理3得
(23)
同理,由系统(21)可得
(24)
其中
综合(11)~(13)、(17)~(19)、(23)和(24)式,得证推论1。
4. 数值仿真
在这一部分,我们给出两个仿真算例,来验证理论结果的有效性。
例1:考虑以下具有离散时滞和时变时滞的中立型马尔科夫跳跃系统
在这里,我们的目的是使用matlab中的LMI工具箱验证定理1中结果的有效性,假设初始状态
,可得系统的状态轨迹图(见图1,具有离散时滞和时变时滞的中立型马尔科夫跳跃系统状态轨迹图)。
例2:考虑以下具有时变时滞和分布时滞的中立型马尔科夫跳跃系统
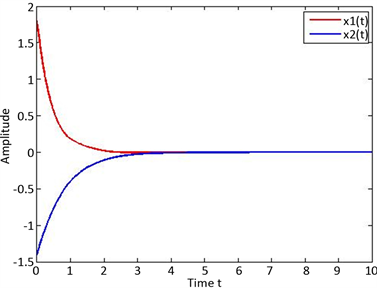
Figure 1. The state trajectories of a neutral Markov jumping system with discrete and time-varying delays
图1. 具有离散时滞和时变时滞的中立型马尔科夫跳跃系统状态轨迹图
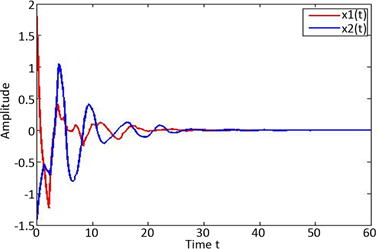
Figure 2. The state trajectory of a neutral Markov jumping system with time-varying delay and distributed delay
图2. 具有时变时滞和分布时滞的中立型马尔科夫跳跃系统状态轨迹图
在这里,我们的目的是使用matlab中的LMI工具箱验证推论1中结果的有效性,假设初始状态
,可得系统的状态轨迹图(见图2,具有时变时滞和分布时滞的中立型马尔科夫跳跃系统状态轨迹图)。
5. 结论
本文考虑了一类中立型马尔可夫跳跃系统的随机稳定性问题。首先,通过构造lyapunov函数,利用Ito’s引理和Jensen’s不等式获得随机稳定性的充分条件。其次,使用matlab LMI工具箱验证结果的正确性。最后,列举两个实例,对此方法的有效性进行验证。
基金项目
贵州省科技厅科学研究基金(J[2015]2074),贵州省科技厅、贵州民族大学联合基金项目(LKM[2013]21),贵州省教育厅群体创新研究项目贵州民族大学博士启动基金项目(KY[2016]021),贵州民族大学科研基金资助项目(2017YB066)。