1. 引言
半主动控制(SAC)最早被美国学者Karnopp在1974年提出 [1] ,相比于主动控制半主动控制具有结构简单易于维护、经济高效仅需要少部分电量便能进行工作特点,因此其也被广泛地应用在其汽车、建筑、桥梁等不同的工程领域中 [2] [3] 。在学者们的研究下,出现了如平衡逻辑控制、天勾逻辑控制、地勾逻辑控制等许多不同的半主动逻辑控制算法 [4] [5] [6] 。Stammers [7] 等人对采用平衡逻辑控制原理的半主动控制汽车悬架系统进行了研究,结果显示该系统可以明显降低受旋转不平衡力或均方加速度作用下的机械传递给地基的力。Vakakis [8] 等人最早通过研究非线性振动提出了非线性能量阱吸振器的概念。非线性能量阱(NES)吸振器主要通过自身的上下振动将主系统传递过来的振动能量耗散进而到达减振的目的 [9] [10] [11] 。Zhu等人 [12] 提出了一种由磁电层压板和磁铁组成、从磁悬浮在外界作用下而产生的非线性振动中获取能量的新型磁电采集器(MGEH)。在现有的文献研究中,半主动控制的运行仍需要外界环境的供能,振动控制系统并不能独立运行。而在本文中将悬浮磁电能量采集装置集合到非线性能量阱中,然后将集合后的非线性能量采集装置和半主动控制隔振装置结合到一个系统中。通过时域、传递率和电流采集的数值仿真分析,可以看出在该系统中非线性能量采集装置在较宽的频率范围内都可以稳定的为半主动控制装置输出电能,系统不但有了更好的减振性能,而且可以完全自给不依赖外界环境而稳定工作。
2. 半主动控制隔振振动系统分析
2.1. 系统模型
含有半主动控制隔振的单自由度振动系统如图1所示,其中线性刚度
线性阻尼
和伺服传动装置(摩擦力
)与主系统质量块
相连,非线性能量阱由非线性刚度
线性阻尼
和小质量块
组成。

Figure 1. Model of semi-active vibration isolation system
图1. 半主动控制隔振振动系统模型
简谐激励u作用在系统的底座上,其中A为位移幅值,f为激励频率。
和
分别为主系统质量块
和非线性能量阱质量块
的位移。根据牛顿第二定律系统的运动方程如下所示:
(1)
本文中的半主动控制隔振主要由一个伺服传动装置完成。
为可控库伦摩擦阻尼力,主要由伺服传动装置调节施加在摩擦板上的法向力来来随时控制其阻尼力的大小 [13] 。本文采用逻辑控制原理中的平衡逻辑控制对振动系统进行半主动控制,其主要目的是控制库伦摩擦阻尼力
使其尽可能平衡系统的弹簧力,从而降低从底座传递到主系统的振动 [7] 。具体的控制原理是:当弹簧力方向与阻尼力方向相反时,控制器便开始工作,使弹簧力和阻尼力达到平衡;当弹簧力与阻尼力方向相同时,控制器停止工作,阻尼力变为零。相比于主动控制,伺服传动装置仅需要少部分电量便可以进行振动控制调节。
(2)
其中参数
为增益,主要通过阻尼力确定在振动控制开启时对弹性力的抵消程度 [7] 。
将方程(2)带入到方程(1)的动力学方程中,经过简化后可得到:
(3)
2.2. 系统减振分析
振动系统参数使用 [14] 中的数据,其中
,
,
,
,
,
,
。使用龙格-库塔法在MATLAB中对方程(3)进行了数值仿真分析。在固有频率附近
处对振动系统进行了时域分析和主系统阻尼能量耗散分析,并与被动控制(
)进行对比进一步研究了半主动控制(
)对系统减振的影响。在如图2所示的时域对比分析中,可以看出半主动控制系统比被动控制系统具有明显更好的减振性能。
系统在受到外界激励后开始振动,其本质是能量由外界向系统内部传递的过程。通过对系统能量传递过程的分析,从能量的角度评价系统的减振性能。根据动能、重力势能和弹性势能公式,可以得到系统结构的能量吸收如下所示 [14] :

Figure 2. Comparative analysis of time-domain responses
图2. 时域对比分析
;
(4)
;
(5)
(6)
(7)
(8)
其中
和
分别是主系统的动能和弹性势能,
和
分别是非线性能量阱的动能和弹性势能,
和
分别是主系统阻尼和非线性能量阱阻尼的能量耗散,
是由外界输入到系统的总能量。其中主系统阻尼在振动过程中耗散的能量占系统总能量的百分比如下所示:
(9)
图3为被动控制时
随时间的变化曲线,可以看出在系统刚开始振动的短暂时间主系统阻尼耗散的能量占系统总能量的百分比急速下降,最后经过10 s稳定在1.68%左右,系统中剩下的大部分能量被系统的其他减振组件(非线性能量阱)耗散掉。造成这种现象的原因主要是:当振动系统为被动控制时,系统在受到外界激励后的瞬间,振动能量由底部的基座传递到主系统,此瞬间主系统阻尼为主要能量耗散组件。然后很快主系统将振动能量传递给依附其的非线性能量阱,此后非线性能量阱开始在系统的能量耗散中占据主要作用,主系统阻尼耗散的能量在系统总能量的占比开始降低并逐渐趋于稳定值。

Figure 3. Analysis of passive control energy dissipation
图3. 被动控制能量耗散分析
图4为半主动控制时
随时间的变化曲线,可以看出在系统刚开始振动的短暂时间主系统阻尼耗散的能量占系统总能量的百分比急速下降后又逐渐上升,最后经过10 s稳定在94.5%左右,系统中的大部分能量被主系统阻尼(半主动控制)耗散掉。造成这种现象的原因主要是:当振动系统为半主动控制时,系统在受到外界激励后的瞬间,振动能量由底部的基座传递到主系统,此瞬间主系统阻尼为主要能量耗散组件。然后很快主系统将振动能量传递给依附其的非线性能量阱,非线性能量阱开始在系统的能量耗散中占据主要作用,主系统阻尼耗散的能量在系统总能量的占比开始降低。之后很快半主动控制装置采用平衡逻辑控制原理开始对系统进行振动控制,主系统阻尼(半主动控制)又开始在系统的能量耗散中占据主要作用并最后趋于稳定。这进一步说明了半主动控制在减振方向的优越性。

Figure 4. Analysis of semi-active control energy dissipation
图4. 半主动控制能量耗散分析
传递率是衡量系统减振性能的一个重要指标。在非线性振动系统中,传递率可以在一定程度上消除激励振幅的影响 [15] 。传递率越大,系统的减振能力就越弱。其定义为振动系统位移与外部激励位移的均方根(RMS)比值 [16] :
(10)
图5为半主动控制和被动控制时的系统的传递率对比分析曲线,可以看出在低频段(0~15 Hz)时,半主动控制系统和被动控制系统具有几乎相同的减振性能。然后随着频率的增大,半主动控制系统相比于被动控制系统具有明显更好的减振性能。

Figure 5. Comparative analysis of transmissibility
图5. 传递率对比分析
3. 非线性能量采集振动系统分析
3.1. 系统模型
含有非线性能量采集的单自由度振动系统如图6所示,其中线性刚度
和线性阻尼
与主系统质量块
相连,集合了悬浮磁电能量采集装置的非线性能量阱由非线性刚度
线性阻尼
悬浮磁电能量采集装置(磁力
)和小质量块
组成。简谐激励u作用在系统的底座上,其中A为位移幅值,f为激励频率。
和
分别为主系统质量块
和非线性能量阱质量块
的位移。其中悬浮磁电能量采集装置是一种由磁电层压板和磁铁组成、从磁悬浮在外界作用下(在本文指非线性能量阱为了耗散主系统的传递过来的振动能量而引起的自身上下振动)而产生的非线性振动中获取能量的新型磁电采集器 [12] 。根据牛顿第二定律系统的运动方程如下所示:

Figure 6. Model of nonlinear energy harvesting vibration system
图6. 非线性能量采集振动系统模型
(11)
其中磁力
,
,
[12] 。
悬浮磁电能量采集装置在质量块
与
之间有相对运动的同时便开始采集能量,其中输出电压、电流、功率如下所示:
(12)
(13)
(14)
其中
是负载电阻,方程(12)中的其他参数在文献 [12] 中已经给出,这里不再列出。
3.2. 系统减振和能量采集分析
振动系统参数仍使用第二节给出的数据。使用龙格-库塔法在MATLAB中分别对含有非线性能量采集(With NES-MGEH)的振动系统和不含有非线性能量采集(Without NES-MGEH)的振动系统进行了数值仿真分析。在固有频率附近
处对振动系统进行了时域对比分析。在如图7所示的时域对比分析中,可以明显看出含有非线性能量采集的振动系统具有更好的减振性能。

Figure 7. Comparative analysis of time-domain responses
图7. 时域对比分析
由于悬浮磁电能量采集装置采集到的是交流电压,为了便于分析取交流电压的实部进行研究。
 (15)
(15)
 (16)
(16)
 (17)
(17)
其中方程(15)中的其他参数在文献 [12] 中已经给出,这里不再列出。取负载电阻 时,分别在
时,分别在 和
和 处对With NES-MGEH的振动系统进行了电流输出分析,研究在不同频率下电流的输出情况。如图8和图9所示,两个频率下With NES-MGEH的系统在开始振动的前几秒输出的电流都有较大的变化,然后在几秒后便又都趋于稳定,最后在较长的时间内都可以稳定的输出电流。
处对With NES-MGEH的振动系统进行了电流输出分析,研究在不同频率下电流的输出情况。如图8和图9所示,两个频率下With NES-MGEH的系统在开始振动的前几秒输出的电流都有较大的变化,然后在几秒后便又都趋于稳定,最后在较长的时间内都可以稳定的输出电流。

Figure 8. Analysis of electric current output at 
图8. 在 时的电流输出分析
时的电流输出分析
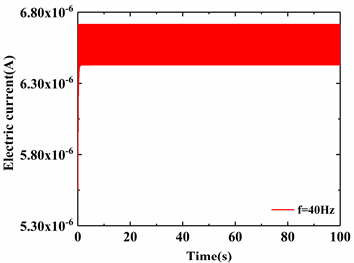
Figure 9. Analysis of electric current output at 
图9. 在 时的电流输出分析
时的电流输出分析
4. 半主动控制隔振与非线性能量采集一体化系统分析
4.1. 系统模型
通过上文第二节的分析,可以看出半主动控制系统相比于被动控制系统具有明显更优秀的减振性能。仅需要部分电量,由伺服传动装置调节的半主动控制便可以进行工作、广泛的应用于工程领域减振。通过上文第三节的分析,可以看出含有非线性能量采集的系统不仅拥有优秀的减振性能,而且同时也可以稳定的输出电流。而在一些严酷的维护周期较长的工程环境中,一套能够完整自给的减振系统将会具有更大的优势和前景。因此在本节中将半主动控制隔振与非线性能量采集结合在一个系统中,研究在两个装置共同作用下系统的减振和能量采集情况。
含有半主动控制隔振与非线性能量采集一体化的单自由度振动系统如图10所示,其中线性刚度 线性阻尼
线性阻尼 和伺服传动装置(摩擦力
和伺服传动装置(摩擦力 )与主系统质量块
)与主系统质量块 相连,集合了悬浮磁电能量采集装置的非线性能量阱由非线性刚度
相连,集合了悬浮磁电能量采集装置的非线性能量阱由非线性刚度 线性阻尼
线性阻尼 悬浮磁电能量采集装置(磁力
悬浮磁电能量采集装置(磁力 )和小质量块
)和小质量块 组成。通过一个闭合电路将伺服传动装置与悬浮磁电能量采集装置连接,随时将悬浮磁电能量采集装置采集到的电能传输给伺服传动装置进行振动控制。简谐激励u作用在系统的底座上,其中A为位移幅值,f为激励频率。
组成。通过一个闭合电路将伺服传动装置与悬浮磁电能量采集装置连接,随时将悬浮磁电能量采集装置采集到的电能传输给伺服传动装置进行振动控制。简谐激励u作用在系统的底座上,其中A为位移幅值,f为激励频率。 和
和 分别为主系统质量块
分别为主系统质量块 和非线性能量阱质量块
和非线性能量阱质量块 的位移。根据牛顿第二定律、结合方程(3)和(11)系统的运动方程如下所示:
的位移。根据牛顿第二定律、结合方程(3)和(11)系统的运动方程如下所示:

Figure 10. Model of integrate semi-active control vibration isolation and nonlinear energy harvesting system
图10. 半主动控制隔振与非线性能量采集一体化系统模型
 (18)
(18)
其中磁力 ,具体参数在第三节已经给出。
,具体参数在第三节已经给出。
4.2. 系统减振和能量采集分析
振动系统参数仍使用第二节给出的数据。使用龙格-库塔法在MATLAB中分别对含有半主动控制隔振与非线性能量采集一体化(With SAC-NES-MGEH)的系统、只含有非线性能量采集(With NES-MGEH)的系统和不含有半主动控制隔振与非线性能量采集一体化(Without SAC-NES-MGEH)的系统进行了数值仿真分析。在固有频率附近 处对振动系统进行了时域对比分析。在如图11所示的时域对比分析中,可以看出With SAC-NES-MGEH的系统和With NES-MGEH的系统都比Without SAC-NES-MGEH的系统具有更好的减振性能。并且通过放大图可以看出With SAC-NES-MGEH的系统比With NES-MGEH的系统具有更好的减振性能,结果说明将半主动控制隔振与非线性能量采集结合在一起可以进一步提高系统的减振性能。
处对振动系统进行了时域对比分析。在如图11所示的时域对比分析中,可以看出With SAC-NES-MGEH的系统和With NES-MGEH的系统都比Without SAC-NES-MGEH的系统具有更好的减振性能。并且通过放大图可以看出With SAC-NES-MGEH的系统比With NES-MGEH的系统具有更好的减振性能,结果说明将半主动控制隔振与非线性能量采集结合在一起可以进一步提高系统的减振性能。

Figure 11. Comparative analysis of time-domain responses
图11. 时域对比分析
根据上文第三节给出的输出电压和功率公式,通过数值仿真分析研究With SAC-NES-MGEH的系统的电能采集情况(理想情况下认为该系统采集到的电能全部自给用于其伺服传动装置进行半主动控制)。取负载电阻 时,分别在
时,分别在 和
和 处对With SAC-NES-MGEH的振动系统进行了电压输出分析,研究在不同频率下电压的输出情况。如图12和图13所示,两个频率下With SAC-NES-MGEH的系统在较长的时间内都可以稳定的输出电压,而且随着频率增大采集到的电压有逐渐增大的趋势。
处对With SAC-NES-MGEH的振动系统进行了电压输出分析,研究在不同频率下电压的输出情况。如图12和图13所示,两个频率下With SAC-NES-MGEH的系统在较长的时间内都可以稳定的输出电压,而且随着频率增大采集到的电压有逐渐增大的趋势。
取负载电阻 时,研究在较大频率范围下With SAC-NES-MGEH的振动系统的最大电压和功率输出情况。如图14和图15所示,可以看出With SAC-NES-MGEH的振动系统在较宽的频率下(0~100 Hz)都能输出电压和功率。并且验证了上文的的分析,随着频率的增大采集到的最大电压和功率逐渐增大直至最后趋于一个恒定值。
时,研究在较大频率范围下With SAC-NES-MGEH的振动系统的最大电压和功率输出情况。如图14和图15所示,可以看出With SAC-NES-MGEH的振动系统在较宽的频率下(0~100 Hz)都能输出电压和功率。并且验证了上文的的分析,随着频率的增大采集到的最大电压和功率逐渐增大直至最后趋于一个恒定值。
通过对With SAC-NES-MGEH的系统在减振和能量采集方面的分析,可以看出该系统不但拥有更优异的减振性能,而且在振动开始后能量采集装置可以稳定的为伺服传动装置输出电能,在较宽的频率范围内都可以输出足够伺服传动装置工作的电能,使该一体化减振系统可以完全自给不依赖于外界环境而稳定工作。
5. 参数分析
通过在第四节对With SAC-NES-MGEH的振动系统的分析,可以看出该系统无论是在减振方面还是在能量采集后自给来应对复杂工程环境方面都有很好的表现。为使该系统适应不同的工作环境,对该系统进行了主要参数的参数分析。
对于伺服传动装置,其参数增益 是调节半主动控制的重要参数,通过数值仿真研究在不同增益
是调节半主动控制的重要参数,通过数值仿真研究在不同增益 下的传递率变化情况。如图16所示,随着增益
下的传递率变化情况。如图16所示,随着增益 的增大,系统的传递率越来越低,系统的减振性能越来越好。但增益
的增大,系统的传递率越来越低,系统的减振性能越来越好。但增益 的值不能等于0.5,以防止系统出现啮合状态。
的值不能等于0.5,以防止系统出现啮合状态。
对于悬浮磁电能量采集装置,从方程(15)、(16)和(17)可以看出负载电阻 影响着系统的输出电压、电流和功率,通过数值仿真研究在不同负载电阻
影响着系统的输出电压、电流和功率,通过数值仿真研究在不同负载电阻 下输出电压的情况。如图17所示,可以看出随着负载电阻
下输出电压的情况。如图17所示,可以看出随着负载电阻 的增大系统在低频下的的输出电压越来越大。而在高频处,随着电阻的增大系统的输出电压几乎不再变化。
的增大系统在低频下的的输出电压越来越大。而在高频处,随着电阻的增大系统的输出电压几乎不再变化。

Figure 16. Analysis of gain  parameter variation
parameter variation
图16. 增益 参数变化分析
参数变化分析
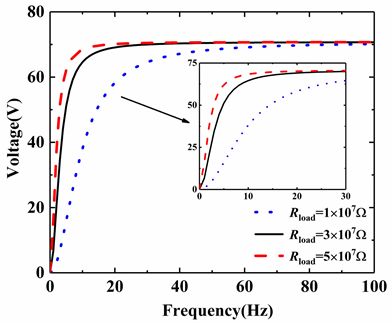
Figure 17. Analysis of load resistance  parameter variation
parameter variation
图17. 负载电阻 参数变化分析
参数变化分析
6. 结论
本文将半主动控制隔振应用到含有非线性能量阱的单自由度振动系统中,通过与被动控制系统的时域对比分析、主系统能量耗散对比分析和传递率对比分析研究半主动控制系统的减振性能。通过对含有非线性能量采集的单自由度振动系统进行时域分析和电流采集分析,研究了其在减振和能量采集方面的性能。最后为了应对复杂严酷的工程环境,将半主动控制隔振与非线性能量采集结合在一个系统中,进一步研究在两个装置共同作用下系统的减振和能量采集情况。得到了以下结论:
1) 通过时域对比分析和主系统阻尼能量耗散对比分析,结果显示半主动控制系统比被动控制系统具有明显更好的减振性能。通过传递率对比分析,结果显示在低频段(0~15 Hz)时,半主动控制系统和被动控制系统具有几乎相同的减振性能。然后随着频率的增大,半主动控制系统相比于被动控制系统具有明显更好的减振性能;
2) 通过时域分析和电流采集分析,结果显示含有非线性能量采集的系统不仅拥有优秀的减振性能,而且同时也可以稳定的输出电流(如图8和图9所示);
3) 通过对半主动控制隔振与非线性能量采集一体化系统在减振和能量采集方面的分析,可以看出该系统不但拥有更优异的减振性能,而且在振动开始后能量采集装置可以稳定的为伺服传动装置输出电能,在较宽的频率范围内都可以输出足够伺服传动装置工作的电能。在两个装置共同作用下该一体化系统不仅拥有更好的减振性能,而且还可以做到完全自给不依赖于外界环境而工作。在条件严酷、维护周期较长的工程环境中有很好的应用前景。