1. 引言
车载充电机对于整个地铁车辆而言有着非常重要的作用,DC110V的蓄电池需要车载充电机充电,车辆正常运行情况下通道照明、制动控制、司机室控制需要车载充电机为其提供辅助110V DC的电源。基于北京平谷线地铁业主的需求,开发了一款交错Buck电路的车载充电机。硬件上采用三电平降压开关技术 [1] ,软件上基于DSP TMS320F28335实现数字智能化交错控制。
文中给出了车载充电机的硬件拓扑,分析了其工作原理,在此基础上,提出了电压、电流闭环的PR数字控制策略,为了验证所提出控制方法的有效性,构建了基于电压、电流闭环的数字控制系统。文中基于PSIM软件搭建了系统的仿真模型,最后,通过实验,验证其控制方法的有效性和可靠性。
2. 车载充电机的工作原理
基于交错BUCK三电平的车载充电机硬件拓扑如图1所示,其中,输入侧为交流380 ± 10%V,来自车辆上的ACM输出(即辅助变流器模块),由于ACM的输出电压含有谐波分量和高频干扰,为了滤除谐波以及消除高频干扰,因此在输入侧加入EMI滤波器;D1-D6组成三相全桥整流电路,为了使直流母线电容C1,C2,C3,C4上的电压缓慢上升,避免大电压对电容的冲击从而影响电容的寿命,故在电路中加入预充电电路,S1为充电接触器,R1为充电电阻,S2为分离接触器,这在很大程度上起到对电容保护的功能,防止电容损坏。
图中,C1,C2,C3,C4既是直流母线稳压电容,也是后级三电平直流降压电路的分压电容,其容量很大并且相等,C1,C2,C3,C4两端的电压均为直流母线电压的一半,D7 & D8为续流二极管,L2为滤波电感,C5为滤波电容;图1中IGBT VT1,VT2交错工作,即其驱动信号移相180˚,开关管在一
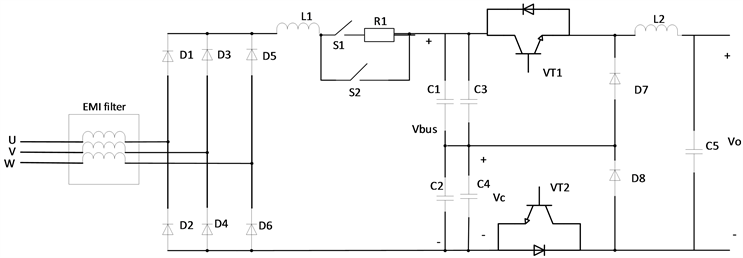
Figure 1. Topology structure of on-board battery charger
图1. 车载充电机拓扑结构
个工作周期内的工作模态在此不作详细的分析,可参考文献 [2] 。
接触网正常时,地铁车辆受电弓升弓,升弓后当ACM工作正常时,即车载充电机输入侧有交流380 V ± 10%电压,整流后转换为DC450V-564V的直流电压信号,经直流降压三电平变换器后输出电压的范围为DC78V-130V,经过滤波电路后,使输出电压、电流稳定输出。
3. 车载充电机数字控制策略
针对车载充电机的特点,设计了基于TMS320F28335 DSP (即数字信号处理器)的双闭环控制系统,如图2所示。
图中,PT为电压传感器,CT为电流传感器。由图2可以看出,根据蓄电池不同的充电阶段,此控制系统由双电压PR控制器或者外环为电流PR控制器,内环为母线电压PR控制器相互作用,用来控制开关管VT1和VT2的导通与关断,输出电压或输出电流经PR调节器作用后,作为飞跨电容电压环的反馈量,与载波信号调制后生成PWM信号用于驱动下管VT2;飞跨电容电压环经PR调节器作用后用于输出电压环或者输出电流环的反馈量,与载波信号调制后生成PWM信号用于驱动上管VT1,(其中VT1的驱动信号与VT2的驱动信号交错导通,相位移相180˚)。
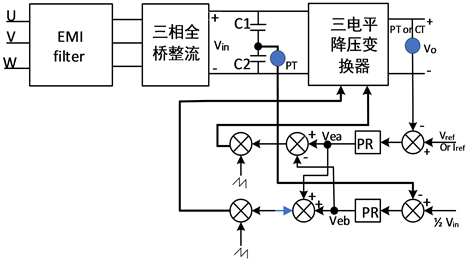
Figure 2. Digital control system of on-board battery charger
图2. 车载充电机数字控制系统
若变换器工作在稳定状态,若飞跨电容(即C1 & C3或C2 & C4)两端的电压受到扰动而上升,如图2所示,Vc > 1/2 Vbus,此时,电容电压PI调节器输出的结果为负(即Veb < 0),因此Vea – Veb结果增大,使得VT1的占空比增大,Vc则减小,VC减小会导致Veb + Vea减小,进而Q2占空比减小,从而使电容电压稳定在1/2 Vbus [3] [4] ,输出电压、输出电流按照蓄电池的充电曲线,稳定输出。
4. 基于PSIM软件的车载充电机控制系统仿真研究
为了验证数字控制策略的合理性,以输出双电压闭环PR控制器为例建立系统仿真模型,如图3所示:
图3中,开关频率设为15K,直流输入电压(即图1中三相全桥不可控整流后的电压)设为520VDC,C2 = C3 = 100 uF,L1为0.5 mH,C1为500 uF,负载R设为500 Ω。
从图4可以看出,开关管VT1&VT2交错导通,互相移相180˚角度,与理论分析完全吻合。
图5为车载充电机输出电压波形,从图中可以看出,输出电压波形没有出现震荡或纹波过大的现象,输出电压稳定可靠。
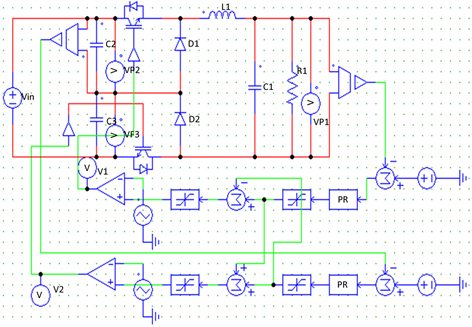
Figure 3. Simulation model of on-board battery charger control system
图3. 车载充电机控制系统仿真模型
5. 实验分析
为了验证基于Buck交错三电平车载充电机的控制策略上,在实验样机上进行试验研究,调节交流输入端的电压,使直流母线电压稳定输出DC520V,图6所示为VT1和VT2的驱动信号,从图中可以看出两驱动PWM信号幅值相同,相位相差180˚,为了防止两个管子出现同时导通或者同时关断的现象在驱动波形的上升沿和下降沿均设有死区。
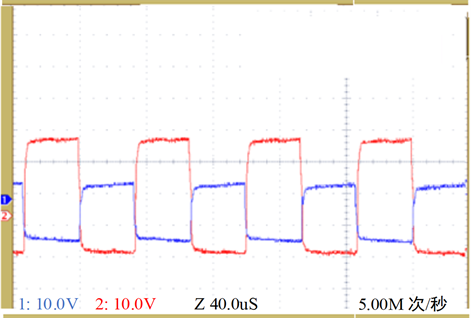
Figure 6. Drive signal of switch VT1 & VT2
图6. 开关管VT1 & VT2的驱动信号
图7中,通道3为充电机的充电电流波形,从图中可以看出,在充电初始阶段,有一软启动过程,时间持续为12 S,12 S软启动完成后输出电流稳定在30 A,没有出现输出电流震荡现象,纹波也在±5%以内,满足要求。
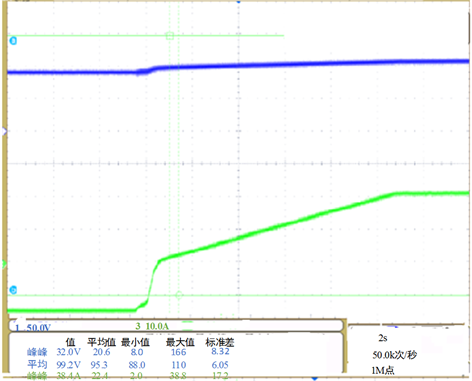
Figure 7. Battery charger wave during the constant current charging mode
图7. 蓄电池恒流模式充电机波形
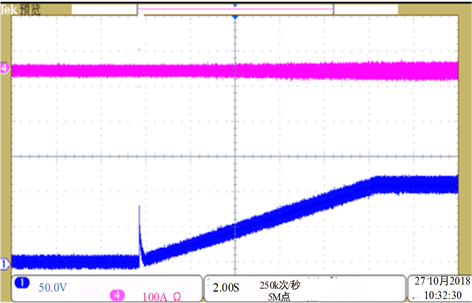
Figure 8. Battery charger wave during the constant voltage charging mode
图8. 蓄电池恒压模式充电机波形
图8中,通道1为充电机的充电电压波形,从图中可以看出,在充电初始阶段,有一软启动过程,时间持续为12 S,12 S软启动完成后输出电压稳定在120 V,没有出现输出电压震荡现象,纹波也在±5%以内,满足要求。
总之,基于Buck交错电路的车载充电机,能根据蓄电池充电的特性曲线满足蓄电池充电的需要,由于采用交错控制技术,使开关管的电压应力减半,减小了开关管的开关损耗,从而能提高整个系统的转换效率,试验结果表明输出电压、电流波形稳定可靠,从而验证所提出的数字控制策略的正确性。
6. 结论
针对北京平谷线地铁业主的需求,开发了一款基于Buck交错电路的车载充电机,提出了车载充电机的硬件拓扑,在分析其工作原理的基础上,设计了变换器的数字件控制系统,为了验证其控制系统构建了PSIM的仿真模型,为了进一步验证数字控制策略的合理性,进行了实验研究,仿真和实验结果表明,输出电压、电流波形稳定,纹波含量均在标准范围以内,开关管的电压应力较单Buck电路减小了一半,从而极大地减小了开关损耗,提高车载充电机的工作效率。