摘要:
利用惯性测量组件(IMU)的周期性旋转自动补偿光学陀螺的漂移是实现捷联惯导系统高精度、长航时的有效途径之一。本文阐述了影响单轴旋转式惯导系统的误差效应,分析了单轴旋转方案设计的关键因素,并针对传统四位置单轴转位方案在静态情况下水平方向上的常值漂移误差抵消不完全的问题,提出了一种改进的四位置单轴转位方案,通过计算机仿真比较了自补偿前后两种方案下惯导系统的导航误差(位置、姿态误差),结果表明采用旋转自补偿技术可以克服惯性元件的静态误差,经改进的四位置转位方案更是大大提高了导航输出的位置和姿态精度。
Abstract:
Using the periodic rotation of inertial measurement unit to compensate the drift of optical gyros-cope automatically is one of the effective ways to realize the high accuracy and long-distance na-vigation of strapdown inertial navigation system. This paper expounds the error effect of the sin-gle-axis rotary inertial navigation system, analyses the key factors of its design, and aims at the constant drift of the traditional four-position single-axis rotation in the horizontal direction under static conditions. A modified four-position single-axis rotation direction is proposed to eliminate the incomplete errors. The navigation errors (position and attitude error) of the INS are compared by computer before and after self-compensation. The results show that the static errors of inertial compents can be overcome by using rotation self-compensation technology and the accuracy of position and attitude is improved greatly by modified four-position rotation scheme.
1. 引言
为满足运载体长时间航行的导航精度的需求,通常有两种途径,一种是提高惯性器件的性能,这需要更高精度的惯性传感器,由于受现代工艺水平的限制,这种方法不仅耗时长,难度大,而且成本高。第二种途径是误差补偿,一般情况下,惯性元件的误差补偿方法有两种:一种是利用外信息进行校正,如组合GPS信息、地磁传感器信息、CNS信息等 [1] ;另外一种方法是惯性器件误差的自补偿方法,旋转式捷联惯导系统通过对惯性测量组件(IMU)进行周期性的机械转动来实现对惯性器件的误差补偿,其实质是一种从系统角度消除误差的自补偿技术,从而有效提高惯导系统的导航精度。
2. 单轴旋转式捷联惯导系统的误差效应
由于光学陀螺(激光陀螺、光纤陀螺等)对重力g不敏感 [2] ,对这类陀螺进行翻转或旋转运动不会增加因重力引起的漂移,所以在现实惯性敏感元件精度受限的条件下,通过对系统中IMU的旋转来提高系统的精度。捷联惯导系统在导航过程中存在一系列影响导航精度的误差,其中IMU误差是主要误差源。
2.1. 常值误差效应
常值误差是指IMU中的陀螺仪的漂移误差和加速度计的零位误差为常值时的情况。通常情况下,陀螺仪漂移误差是由两部分构成的,分别为常值漂移误差和随机漂移误差。虽然可以事先对常值漂移予以补偿,但实际应用中常值漂移会随着时间不断发生变化,在每一次或每日开启设备进行导航工作后,陀螺仪会随着工作时间的增长使得常值漂移不断发生缓慢的变化,这样的漂移误差分别为逐次启动漂移和逐日启动漂移,最终随着这些漂移误差随时间的不断积累会导致惯导系统的位置精度受到严重影响。
2.2. 标度因数误差效应
惯性传感器(陀螺仪和加速度计)的输出量与输入量的比值称为标度因数。由于种种原因,在进行标定实验时,不可能将惯性传感器的标度因数标定得绝对准确,标度因数很有可能随着环境的改变,时间的变化等因素而改变,因此而产生的误差为标度因数误差。标度因数误差包括对称性误差和非对称性误差 [3] 。
2.3. 随机误差效应
陀螺仪和加速度计的随机漂移误差简称随机误差,通常情况下随机误差用高斯白噪声来表示 [4] 。因为单轴旋转式捷联惯导系统的旋转频率远远小于高斯白噪声的频率,通过单轴旋转不能将变化很快的误差量在一个旋转周期内消除,即通过单轴旋转不能消除随机漂移误差。可以通过采用滤波估计的方法,对随机漂移误差进行估计,已达到减小随机误差对导航精度的影响。
3. 单轴旋转方案设计
3.1. 单轴旋转系统转轴的选取
对于舰船单轴旋转式捷联惯导系统,通常选择绕天向轴进行旋转。因为在航行中舰船水平方向的横摇角和纵摇角会发生变化,此时,IMU在旋转过程中旋转轴方向上的加速度计基本上都处在天向轴方向附近,虽然这个方向的加速度计的常值漂移误差并不能通过旋转得到调制,但同时该误差对惯性系统的导航精度的影响也很小,只有此误差在水平方向上的投影会对导航精度造成影响;在初始对准过程中,绕天向轴旋转可以便捷地控制惯性测量组件艏向角的变化,这样对于提高系统的可观测度非常有帮助,同时能够得到更好的初始对准与标定结果。因此,目前国际上舰船装备的单轴旋转式惯导系统均是将转轴选取在天向轴方向上的。
3.2. 旋转速度的选取
惯性测量组件(IMU)通过单轴旋转运动实现了对惯导系统的误差调制,需要根据IMU相对于运载体的方向余弦转换矩阵及惯性测量组件的姿态角求得运载体的姿态角。旋转速度是惯性测量坐标系到载体坐标系的转换矩阵中规律变化的唯一参数,故旋转速度的选取对惯导系统误差调制效果起着至关重要的作用。通常情况下,单轴旋转式捷联惯导系统的旋转运动角频率应取为舒拉周期频率的两倍到150 Hz之间,即大约为4 × 10−4 Hz~150 Hz之间,旋转运动角频率正比于旋转速度 [5] 。虽然IMU的旋转运动角频率远大于舒拉周期的频率,但是不应将旋转运动角频率选得很大,若旋转运动角频率很大的话,不但造成转动机构负担增大,同时使得旋转轴上的陀螺仪和水平方位的加速度计始终敏感到较大的角速率与比力,这导致IMU对于运载体的小振幅运动的敏感精度降低,不利于长航时提高导航精度。综上,在实际使用中,常将惯性测量组件的旋转速率选取在1˚/s~50˚/s之间。
3.3. 旋转周期的确定
转动状态下捷联惯导“数学平台”的误差角度增长与一个转动周期内漂移的常值分量无关,与静止状态下相比,增长速度及大小都大为降低。并且漂移的变化速率越缓慢,转动周期越短,对非随机漂移引起误差的自动补偿效果越好。然而转动周期也不能特别的短,因为这将会增加机械结构和加速度计的负担。一般在采取了温控、磁屏蔽以后,都能够保证惯性元件的漂移变化很慢,此时系统误差主要以舒勒周期、地球自转周期和傅科周期三种震荡周期传播,其中频率最高的舒勒周期为84.4 min,如果系统没有特别的干扰和误差源,只需转动一周的时间小于舒勒周期数倍即可“平均掉”常值漂移。所以大多数旋转系统均采用转停结合的方式,转速虽快,但转动周期一般都为十几分钟以上。
3.4. 旋转运动方式的选择
旋转运动方案的选择和系统导航精度之间存在一定的平衡关系 [6] [7] ,旋转运动的方案设计必须要严格保证姿态角信息在通过方向余弦转换矩阵的转换过程中对系统实际的姿态输出的实时性和精度不产生影响。在设计旋转运动方案时,还要考虑惯性测量组件通过正反两个方向的旋转对误差的调制效果。因为在旋转系统的旋转轴方向上存在旋转角速率,适当使用正反两个方向旋转可以使一些误差量的符号先正后反或是先反后正,这样在一个旋转运动周期内可以将这个误差抵消。
4. 单轴正反旋转方案设计
目前国际上的机械抖动激光陀螺单轴旋转式惯导系统普遍采用了四位置转停的单轴转位方案,例如美国的MK39MOD3C和WSN-7B系统 [8] [9] 。在这种方案中系统不含有滑环,并且为了可靠性的考虑,IMU的最大转动角度被限制在小于360˚的范围内。但在转动的过程中发现,水平方向惯性元件发生的常值漂移误差无法得到自动抵消。基于此,本文提出了一种改进的四位置转位方案。
4.1. 传统的四位置单轴转位方案
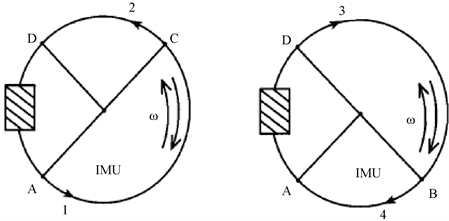
在单轴旋转系统中,当IMU能够转动的最大角度小于360˚时,常采用IMU在(−135˚,+45˚,+135˚,−45˚)的四个位置间循环运动的转位方案来进行漂移误差的自动补偿 [10] 。设IMU在每个位置上停止相同的时间Ts,令每次转动的角速度均为
,如图1所示,其转动的过程描述如下:
次序1,IMU从A点出发正转180˚到达位置C,停止时间Ts;次序2,IMU从C点出发正转90˚到达位置D,停止时间Ts;次序3,IMU从D点出发反转180˚到达位置B,停止时间Ts;次序4,IMU从B点出发反转90˚到达位置A,停止时间Ts;然后IMU按照次序1~4的顺序循环运动。在这种转位方案中,IMU是每次转动180˚或者90˚间隔进行,而非通常认为的每次转动90˚。
 (1) 次序1、2 (2) 次序3、4
(1) 次序1、2 (2) 次序3、4
Figure 1. Order of IMU four position with rotary angle less than 360 degrees
图1. 转动角度小于360度时的四位置IMU转动次序
从图1的对称性可以发现,在IMU从B位置转动到C位置或者从C位置转动到B位置转动的过程中,水平方向惯性元件发生的常值漂移误差在一个完整周期内并不能得到完全抵消。适当的增加在每个位置的停止时间,或者缩短转动的时间可以有效的减小没有抵消的漂移误差所占比例的大小。
4.2. 改进的四位置单轴转位方案分析
即使在载体静止的条件下,传统的四位置单轴转位方案也无法把水平方向上惯性元件的常值漂移误差全部抵消。经理论分析将IMU停止在A、D两个位置停留的时间由Ts增加为
就有可能解决这个问题。
设IMU停止在A、D两个位置停留的时间均为
,其它条件和转动次序不变,一个完整转动周期内数学平台的累积的东向、北向误差角度为:
(3-1)
(3-2)
、
——水平方向陀螺的常值漂移。
可见,只要在A、D两个位置停留的时间
满足下列条件:
,则式(3-1)和(3-2)均为零,即一个转动周期内水平方向上惯性元件的常值漂移所引起的数学平台累积误差角度为零。
因此,采用新改进的四位置单轴转位方案,只需将IMU在A、D两位置的停止时间增加
,在载体静止的状况下即可以实现把水平方向上惯性元件的常值漂移误差全部抵消,实现起来非常简单,可应用于实际的单轴系统中。
5. 仿真分析
为了验证该方法对惯导系统性能的影响,本文对惯导系统静态条件下、IMU按两种方案绕方位轴旋转进行了仿真,仿真条件如下:
1) 载体处于静止状态,三个陀螺的漂移均为0.02˚/h,加速度计零偏选为0.0001 g,忽略其他误差因素的影响。
2) 采用的调制方式是单轴持续正反转调制方式,调制角速度选为6˚/s。
3) 仿真时间均为72小时。
由图2~4中的姿态误差曲线可见,静态条件下,三个姿态误差均存在直流分量,且其幅值较大;单轴旋转调制后,由于水平陀螺常值漂移得到调制,水平姿态具有很大的改善,方位误差幅值比静态时减小一半;改进的单轴旋转调制结果中,水平陀螺常值漂移得到调制外,由于方位轴惯性器件误差也得到了补偿,姿态误差较补偿前有更加明显的改善。
静态时,经度误差表现出明显的发散特性,纬度误差虽未发散,但存在较大幅值的舒勒周期振荡和更大幅值的地球周期振荡;单轴旋转调制后,由于水平惯性器件误差得到了调制,经度误差发散程度明显减小,纬度误差剩余较小幅值的地球周期振荡,舒勒周期振荡幅值有了较大程度的减小;改进的单轴旋转式惯导系统,由于方位惯性器件误差得到完全补偿,随时间发散的位置误差彻底消除,剩余的位置误差周期振荡幅度最大仅约为(5 × 10−5)˚。
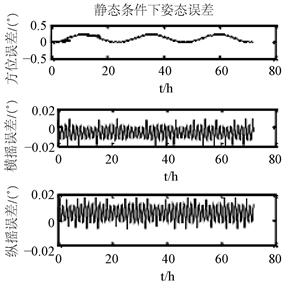
Figure 2. Navigation errors of single-axis rotation system under static conditions
图2. 静止条件下单轴旋转系统导航误差
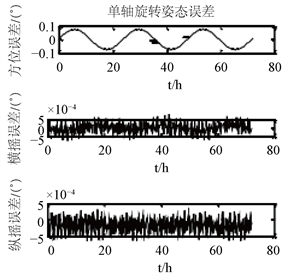
Figure 3. Navigation errors of single-axis rotation system with traditional four-position
图3. 传统四位置单轴旋转系统导航误差
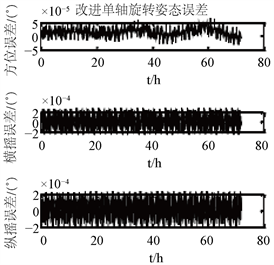
Figure 4. Navigation errors in improved four-position single-axis rotation system
图4. 改进四位置单轴旋转导航误差
6. 结论
仿真结果表明,采用旋转技术后,光学捷联惯导系统克服了惯性元件的静态误差,大大提高了导航输出的位置和姿态精度,改进的四位置单轴转位方案,只需将IMU在A、D两位置的停止时间增加
,在载体静止的状况下即可以实现把水平方向上惯性元件的常值漂移误差全部抵消,实现起来非常简单,可应用于实际的单轴旋转惯导系统中。