1. 引言
排水管道深埋地表之下,分布错综复杂,调查掌握管道状况,并及时维修可预防事故发生,延长管道寿命。传统检测方法主要有目测法 [1] 、反光镜检测 [2] 、潜水员下管道检测 [3] 、量泥斗检测 [4] 等方法。传统方法较多依靠人工参与,随着管线建设的高速发展,检测需求的增加,已跟不上现代化排水管网管理自动化智能化要求。近几年,仪器检测在管道领域得到广泛应用,主要有闭路电视检测系统 [5] 、声纳检测系统 [6] 、潜望镜系统 [7] 、红外分析系统 [8] 、透地雷达系统 [9] 等检测设备。
国外管道检测新技术主要向两个方向发展。1) 管道扫描与评价技术 [10] ,主要利用扫描仪及回转仪扫描整个管道,相比闭路电视检测技术,它能够提供更全面更高清的管道数据,但是其检测成本也比闭路电视检测高。2) 多重传感器技术 [11] ,它最先由德国提出,包括CCTV系统及三类传感器。一是光学测量系统,主要用于管径的检测,可测量变形病害;二是微波发射器,可用于测量管道附近土壤的松散情况;三是声学传感器,通过声波发散来探测管壁破裂及错口等病害。
近几年机器视觉技术发展迅速,各种仪器设备纷纷面世。此类设备均属于自动化设备,但是处理分析数据依然依靠人工分析视频资料,对处理人员的专业性要求极高,劳动强度大、成本高、效率低。探索高效、准确的管道破裂检测方法已成为当前亟需解决的问题。
本文基于管道图像提出了一种用于管道破裂的自动检测算法。该算法能有效消除管径中心的干扰信息,自动筛选出存在管道破裂的图像,标记破裂存在的位置,实现管道破裂病害高效识别。
2. 管道图像预处理
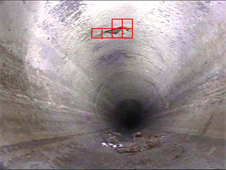
采集的管道破裂图像一般为彩色图像,如图1所示,而图像处理是基于灰度图像进行处理,因为灰度图像只含有亮度信息,针对破裂图像的识别要求需去掉色彩信息。图像的色彩由红(R)、绿(G)、蓝(B)三原色组合而成,通过对RGB三原色数值的叠加得到其他颜色,RGB变化可实现色彩间的转换。
如果三原色的亮度值相等,就会产生灰度颜色。对图像灰度化通常有分量值、最大值、平均值和加权平均值4种方法。本文采用加权平均值来实现灰度化,即将3个分量加权平均进行计算得到灰度值,如式(1)所示。
(1)
式中,
为RGB模型中的某点像素。
3. 区域定位破裂病害自动识别方法
管道二维图像与其他二维图像不同之处在于,其他二维图像是针对平面拍摄的图像,而管道图像是弧形图像。图像中心区域是管道的管径中心,图像底部是过水区域,其他区域是管壁区域。针对弧形图像,一些方法是将图像进行伸展变换为平面图像,然后再采用常规的图像处理技术进行识别病害。本文方法在于首先搜索管道中心,将管道中心区域去掉,然后再去掉底部的水流区域,对管壁采用阈值分割法识别破裂区域。本文提出一种管道破裂识别算法——采用区域排除及形态学滤波方法,该算法处理流程如图2所示。
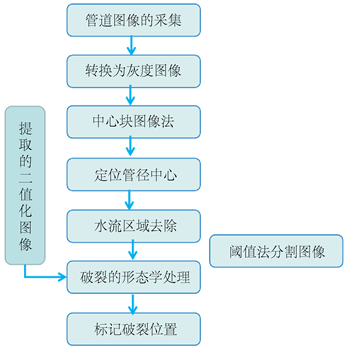
Figure 2. Flow chart for identifying pipeline rupture diseases
图2. 管道破裂病害识别流程图
管道机器人的摄像头巡拍过程中,探头处于管道中心附近位置向前拍摄,采集图像的管径中心不会偏离管径中心太远,对图像建立坐标系,采用数学模型确定管径中心区域,其示意图如图3所示。
记图像的长为a,宽为b,截取图像(1/4a, 1/4b)至(3/4a, 3/4b)部分,记为
。在
中搜寻利用圆形检测算法搜寻圆形区域,记圆形区域像素坐标集合A,记其总共点数为n,(
)为集合中任意一点。可求管径区域的质心,如公式(2)所示。
(2)
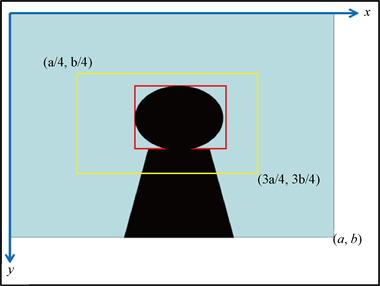
Figure 3. Mathematical model sketch of regional positioning
图3. 区域定位数学模型示意图
记
最大值为
,最小值为
,
最大值为
,最小值为
,管径区域的外接方框如图4中红框所示,管径下方为水流区域,排除水流区域及管径中心即为管壁位置。
记排除管径区域及水流区域的灰度图矩阵为
,其矩阵所有灰度值的算术平均值为
,利用阈值法获得二值化图,判别式如式(3)所示。
(3)
满足公式(3)的
点,对其采用聚类算法剔除孤立点,挑选的区域可认为是破裂,聚类算法不是本文叙述重点,不进行展开。
4. 实验及分析
4.1. 区域定位算法识别破裂结果与真实破裂间差异
为了说明算法实用性,为了说明算法实用性,本文将管道机器人采集的图像用此算法识别,列举下面3组数据来分析,其中两组包含破裂病害,一组不包含破裂病害,验证算法是否能将含病害的数据里的病害挑出,未包含破裂的数据不会挑出破裂病害。另外为了证明算法的鲁棒性,分析本文方法识别出来的破裂与真实数据之间的差异。
 (a)
(a)  (b)
(b)
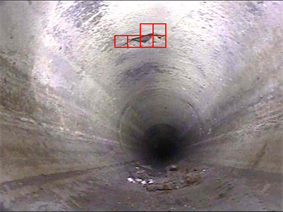
Figure 4. Pipeline image with fracture, (i) group (a) fracture recognition result marking map; (b) binary chart of fracture recognition result
图4. (i)组有破裂,(a) 破裂识别结果标记图;(b) 破裂识别结果二值化图
图4为一组破裂识别的标记结果,图中对破裂位置进行了识别。图中可以看出,识别结果的位置与真实破裂位置吻合,说明本文提出的破裂自动识别算法鲁棒性较好。
图5为一组破裂识别的标记结果,图中对破裂位置进行了识别。图中可以看出,识别结果的位置与真实破裂位置吻合,说明本文提出的破裂自动识别算法鲁棒性较好。
 (a)
(a) 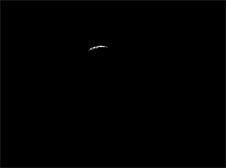 (b)
(b)
Figure 5. Pipeline image with fracture, (ii) group (a) fracture recognition result marking map; (b) binary chart of fracture recognition result
图5. (ii)组有破裂,(a) 破裂识别结果标记图;(b) 破裂识别结果二值化图
图6为第(iii)组数据,不包含破裂。区域定位算法没有识别出破裂,说明本方法不会将未包含破裂的数据挑出破裂病害,实用性较好。
 (a)
(a)  (b)
(b)
Figure 6. Pipeline image without fracture, (iii) group (a) fracture recognition result marking map; (b) binary chart of fracture recognition result
图6. (iii)组无破裂,(a) 破裂识别结果标记图;(b) 破裂识别结果二值化图
4.2. 不同算法间的比较
 (a)
(a)  (b)
(b)
Figure 7. Recognition result, group (i) (a) regional positioning recognition method; (b) Fracture feature search method
图7. 组(i)识别结果,(a) 定区域识别算法;(b) 破裂特征搜索算法
图7中(a)图为定区域算法识别结果,(b)图为破裂特征搜索算法识别结果。从图中可以看出,(a)图识别结果准确识别破裂的位置,而(b)图将管径中心也识别为破裂。
图8中(a)图为定区域方法识别结果,(b)图为破裂特征算法识别结果。从图中可以看出,(a)图识别结果准确识别破裂位置,而(b)图识别结果误识别较多。
 (a)
(a)  (b)
(b)
Figure 8. Recognition result, group (ii) (a) regional positioning recognition method; (b) Fracture feature search method
图8. 组(ii)识别结果,(a) 定区域识别算法;(b) 破裂特征搜索算法
图9中(a)图为定区域方法识别结果,(b)图为破裂特征算法识别结果。从图中可以看出,(a)图识别结果准确识别破裂位置,而(b)图识别结果误识别较多。
 (a)
(a)  (b)
(b)
Figure 9. Recognition result, group (iii) (a) regional positioning recognition method; (b) fracture feature search method
图9. 组(iii)识别结果,(a) 定区域识别算法;(b)破裂特征搜索算法
4.3. 两种方法的耗时分析
为了比较三种方法的耗时,本文计算了每组数据用不同方法在识别破裂过程中运算过程所耗时间,如表1所示。

Table 1. Time consuming of different methods for identifying pothole
表1. 不同方法识别破裂运算过程耗时
从表1中看出,对于三组数据,定区域识别方法较破裂特征搜寻方法耗时长。分析其原因为:破裂特征搜寻法基于灰度值阈值,灰度阈值法针对图像矩阵进行处理,速度较快;定区域方法需要找到管径中心,然后去掉水流区域再进行判断,因此耗时稍长。
5. 结论
本文基于管道图像弧形图像特点,提出了一种管道破裂的自动识别方法。首先定区域加圆形检测算法确定管径中心区域,然后确定水流区域,排除管径中心及水流区域后针对管壁识别破裂。破裂识别实验表明,本文方法识别效果优于破裂特征值识别方法,耗时较破裂特征值长,本文研究方法对于管道图像破裂病害识别有较强的工程意义,对于排水领域外的其他管道缺陷识别有重要意义。