1. 研究背景
随着这些年国家飞速发展,交通建设方面也得到国家的更多支持,有了很大的提升。但由于地形地貌的局限,山区道路修建时大多需要穿山越岭,并且多隧道和连续上下坡。基于西部山区公路交通事故446例 [1] 特性和交通事故多频发的情况,完善山区道路交通安全保护方案具有重要的安全意义。为此,本文在改善中国山区道路交通事故多发的基础上,从驾驶前到驾驶途中以及驾驶后,为驾驶员提供最有效的保护措施,做到始终将驾驶员的安全放在第一位。
在山区道路交通安全方面,我国没有较为完善以及全面的课题,但早对山区交通事故多发的路段和原因进行过多次重复分析。黑龙江工程学院康维新教授在黑龙江省交通厅重点攻关课题的助力下,对不同天气下公路限速值进行分析研究,进而建立了一般性公路限速宏观控制模型 [2] 。同济大学潘晓东教授基于人机工程学的实验研究表明,现行理论计算距离难以满足山区公路平曲线对视距的要求,并提出相应的山区交通安全改善措施 [3] 。
国外研究人员深入分析研究了影响事故多发地点鉴定的不同因素和事故多发地点的判定方法和形成原因。Andrew P. Tarko通过分析综合评价指标和事故损失,提出了基于事故次数和事故损失的事故别方法 [4] 。Rune Elvik调查了欧洲8国危险路段的定义,对比分析其鉴别方法得到综多发点鉴合多方面因素的危险路段鉴别方法 [5] 。
2. 系统设计及关键技术
2.1. 系统总体设计
根据山区道路无线网络信号不稳定的情况,本次作品设计了在线和离线两种状态下的山区道路车辆危险预警系统。预警系统主要由用户车辆子系统和云端数据实时收发平台两个模块组成。
用户车辆子系统用来检测车辆状态并且通过APP实现与用户的交互。主要检测三个方面的车辆状态:一是在汽车进入山区道路之前,系统根据驾驶人提供的车辆保养行驶公里数和车辆制动片更换行驶公里数对车辆制动性能进行大致上的检测;二是利用24 GHz雷达传感器对车辆运动速度、方向和车辆与路边距离进行实时检测;三是最主要的一方面,系统通过GPS/DR组合导航技术对车辆位置信息进行检测。在得知将会发生会车危险的对向来车信息后,系统通过地图将双方位置直观显示给用户,并给用户一个在合适地点停车等待或继续行驶的选择。若检测数据超过安全范围则会通过APP发出会车危险预警。最后将选择结果、位置信息与行驶方向数据通过无线网络发送出去。
云端数据实时收发平台主要是用来接收、储存和发送数据。数据库通过接收到的数据进行储存、更新。系统把每一个山区看作一个独立的区域,数据库对这个区域里的打包数据即位置信息和行驶方向数据进行分析筛选,根据系统导航路线将可能发生会车危险的双方用户车辆的位置信息和行驶方向数据进行交换。在双方作出选择后将选择结果发送给对方。从而实现双方用户数据的实时交互。
两个模块之间的逻辑关系如图1所示。
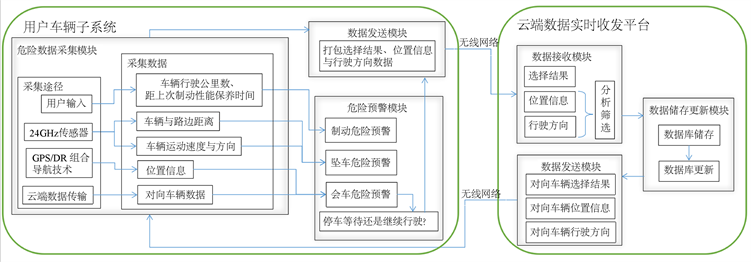
Figure 1. Logical relationship between user vehicle subsystem and cloud data real-time sending and receiving
图1. 用户车辆子系统与云端数据实时收发逻辑关系
当处于在线状态下,两个模块之间利用无线网络进行数据交互,系统进行全功能的危险预警。而在离线状态下,系统通过APP根据所检测的前两方面数据对车辆行驶进行制动危险预警和坠车危险预警。
2.2. 系统功能设计
本次作品针对山区道路行车易发生刹车失灵导致危险的发生、夜间行车时对距离判断不足形成的坠车危险和由于道路狭窄造成的会车危险而专门设计的一款危险预警系统。“山警”软件的logo由山和一条S (Safty)道路组成,如图2所示。具体功能如下:
1) 制动危险预警:根据用户提供的车辆保养行驶公里数和车辆制动片更换行驶公里数,大致判断出车辆制动性能的优劣。当不满足制动性能检测周期要求即保养行驶公里数超过5000公里或制动片更换行驶公里数超过4万公里时通过APP语音预警,警示驾驶人小心低速驾驶并结合国家颁布的GB7258-2004《机动车运行安全技术条件》 [6] 规范要求提供听声音、感觉力度、路试三种简单方法帮助驾驶人自行检查制动性能。图3为制动危险预警界面设计。
2) 坠车危险预警:利用24 GHz雷达传感器检测出运动速度、方向和车辆与路边距离,系统通过对数据的实时更新判断出车辆的运动状态。若车辆与路边距离达到阈值即小于0.30 m,并且仍然向路边运动时就会发出坠车危险预警,如图4所示。
3) 会车危险预警:根据无线网络的情况,系统自动切换在线和离线模式并语音提示驾驶人当前所处模式。在线模式下,系统实时与云端数据库进行数据传输。如图5所示,若判断当前存在会车危险即有对向来车且进入危险距离范围(0.3 m)内,则会发出会车危险预警,将双方车辆位置信息在地图上直观显示给驾驶人。同时在地图上显示适合会车的地点并标明距离,由驾驶人选择停车等待对向来车通过还是继续行驶,如图6所示。这一选择结果也会及时由云端数据实时收发平台传达给对方。离线模式下,系统根据路线规划建议用户提前下载相应的地图,以便软件通过GPS/DR组合导航技术继续导航,帮助车主寻找合适的会车地点。同时语音提示车主山区道路行驶注意事项。
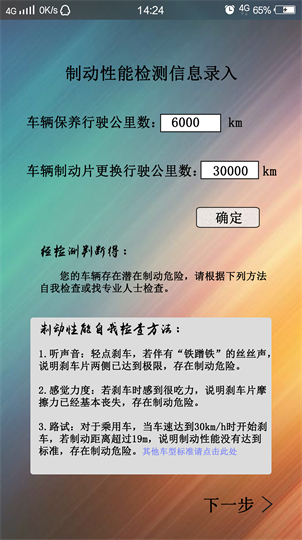
Figure 3. Brake hazard warning interface
图3. 制动危险预警界面
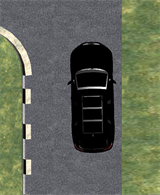
Figure 4. Pre-warning status chart of crash hazards
图4. 坠车危险预警状况图
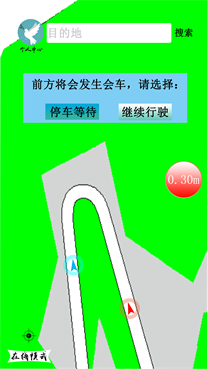
Figure 6. Falling a car and warning of danger
图6. 坠车、会车危险预警界面
4) 一键报警:当预警系统等一些主动安全防护措施仍然没有成功防止事故发生时,用户可以通过APP一键报警,如图7所示。系统及时向有关部门及紧急联系人发送求救信号和位置信息,引导救援人员在最短的时间内赶到事故发生地,减少人身财产损失。
2.3. 数据库设计
为更好实现系统功能,数据库管理系统采用MySQL数据库管理系统。MySQL是一种关系型数据库管理系统,其功能强大、效能稳定、发展历史长久,极少出现异常宕机的现象,使用标准SQL数据语言形式。MySQL开放源代码具有无版权制约、自主性及维修使用成本低等优点。
2.4. 关键技术
1) 导航定位技术的选择
全球定位系统(GPS)因其可以提供全天候、连续、实时的高精度定位信息而在车辆定位中获得了最为广泛的应用;但是,在城市中,由于环境的影响,有一些因素能引起GPS定位误差:
① 多路径效应:从建筑物上反射的GPS信号进入GPS接收机可以产生定位误差。这种误差的大小取决于观测环境,在动态定位的情况下很难建立合适的算法予以改正;
② 信号遮挡:由于茂密的树林等对GPS信号的遮挡使GPS信号减弱、信噪比下降而引起定位误差;
③ 信号丢失:由于“城市峡谷”、立交桥和隧道的影响,使GPS信号短暂丢失而引起的定位误差;
④ GPS接收机动态测量范围的局限性和弱观测环境造成的误差。
GPS和DR的信息融合可以提高系统定位的精度和稳定性,两者各有所长,又具有优势互补特性:一方面,DR是独立定位,不受环境因素的影响,在GPS定位精度下降甚至因丢星而无法工作时,DR可以单独继续工作,提供车辆的位置和速度信息,增加系统定位的可靠性;另一方面,DR 系统推算位置的同时也伴随着误差的不断累积和发散,利用GPS可以不断的对DR进行初始化和校正,从而消除DR的误差累积问题。
定位系统主要包括GPS接收机、压电陀螺仪、里程传感器、车载计算机、液晶显示屏、控制键盘及其他附件。当GPS卫星信号难以被车载GPS接收机接收到时,GPS/DR导航定位系统启动DR定位功能,利用航位推算 [7] 使车载定位系统继续保持较高精度的导航定位,工作原理如图8所示。当GPS信号能够单独提供足够精度的定位时,用GPS精确定位结果辅助DR系统,为DR纠正积累误差,保证DR系统中陀螺仪的方向精度。即使GPS观测到卫星数仅为两颗,也能利用观测数值辅助提高DR的航位推算精准度。
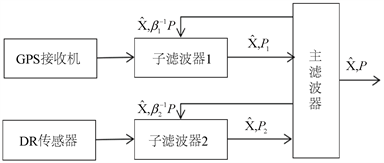
Figure 8. Working principle of GPS/DR technology
图8. GPS/DR导航技术工作原理图
同时为实现定位信息融合,采用分散式滤波 [8] 的多传感器信息融合方式,基于GPS和DR分别独立运用子滤波器进行处理波算法,将各局部状态信息传递给融合中心,以生成高精度的全局的状态估计,保证定位信息的最佳融合,分散式滤波原理如图9所示。CPS/DR组合导航系统,辅以地图匹配技术实时对组合导航系统输出的信息进行地图交叉比对,将导航信息快速、直观地展现给驾驶者。

Figure 9. Principle diagram of decentralized filtering
图9. 分散式滤波原理图
2) 24 GHz雷达传感器
传感器通过发射和接收24 GHz左右频率的微波感知周围所处环境、物体运动的速度和方向以及物体所处位置的距离、方位角等。此类传感器能使用平面微带天线技术,具有占据空间小、高集成化和感应精准等特点。
通过FMCW连续波调频方式,对一部分发射信号和遇到探测目标而反射回来的回波信号进行混频,产生中频信号。中频信号中包含探测目标的距离和速度信息,之后利用中频信号通过频谱分析就可以计算出探测目标的位置和速度信息。因车辆行驶时探测目标处于相对运动的情况下,所以利用三角波调频的方式进行测距测速 [9] 。
3. 系统硬件的实现
3.1. GPS/DR组合导航定位技术
GPS信号和陀螺仪、里程传感器信号的采集工作主要是通过单片机完成。并行采集陀螺仪、里程传感器信号,串行采集GPS信号,再将采集的信号存储在双口RAM的不同地址区域中,利用串行口传递给处理器,处理器读取数据用于滤波运算并将运算结果显示在显示器上。
3.2. 24 GHz雷达传感器
微波雷达系统主要由主控制器、24 GHz雷达、放大滤波电路、A/D电路、D/A电路、电源模块、WiFi模块组成,微波雷达测距的系统设计框图如图10所示。
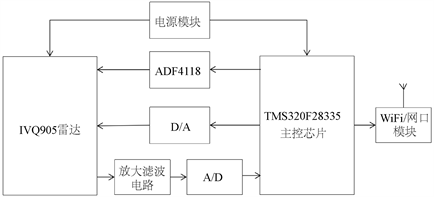
Figure 10. Design block diagram of microwave radar ranging system
图10. 微波雷达测距系统设计框图
4. 创新
根据山区道路存在的行车安全问题,我们设计了山区道路车辆危险预警系统。系统能提供适合错车的准确位置,对向来车信息等。通过地图将双方位置与速度直观显示给用户,提供用户一个在合适地点停车等待或继续行驶的选择。与以往的只能通过视觉来错车相比,此方法不仅提高了错车台的利用率,更增加的行车的安全性。还从制动性能、夜间行车两方面对驾驶员进行危险预警,提供一键报警功能,全方位向驾驶人提供主动保护,能够极大地提高山区道路行车的安全性,减少人员财产损失。
5. 应用前景
随着社会的发展进步,人们对安全的重视程度越来越强。而我国山区道路较多,山路狭窄崎岖,基础设施不完善,导致在山区极易发生交通事故,且大都为重大交通事故,伤亡人数多,经济损失大。此系统能够更大程度上地减少山区交通事故发生的次数,提高山区道路通行效率,符合人们安全观念,因此该系统有很好的应用前景。
参考文献
NOTES
*通讯作者。