1. 引言
走航式ADCP已广泛应用于各种流量测验,与常规流速仪相比,具有测验时间短、分辨率高、收集资料完整、测验精度高及信息量大等特点,尤其适合于流态复杂条件下的水文测验 [1] 。但走航式ADCP也存在流量测验频次少、劳动成本高、航行安全风险大及无法实现流量自动化采集等缺点 [2] [3] 。目前随着水文监测自动化快速推进,以“互联网 + 水文监测”方式逐步克服现行水文监测各个环节相对独立、闭塞、未形成有机整体的短板,大幅提高监测产品时效性,更好发挥水文服务功能 [4] ,因此率先开展流量远程在线自动监测势在必行。
关于ADCP流量自动监测研究成果主要有:刘正伟等 [5] 以底座式ADCP配合滑轮、钢索、绞盘等设备构成的探头支撑系统,可实现对探头的维护、检修、更换、安装及调试,适用于中泓流速小于5 m/s的中小河流;杜兴强等 [6] 采用在主洪道上修建栈桥建立直立式H-ADCP监测台,适用于河床相对稳定的流量在线监测;徐志国等 [7] 采用贴底式水下ADCP探头自动沉浮支架系统,通过实时水位和二线能坡法流量计算模型计算出实时流量,系统整体较为复杂;陈卫等 [8] 研发了通用H-ADCP流量在线监测系统,从软件上实现H-ADCP远程控制在线监测及数据传输。本文在前期研究成果基础上,研制了一种倾斜式H-ADCP水下探头安装平台,有效解决了河道内岸坡复杂、河床不稳定、水位变幅较大条件下实现流量在线自动监测,为中小河流流量在线监测H-ADCP探头的安装提供一定的参考价值。
2. 工作基本原理
H-ADCP测流系统固定在河流的岸边水下一固定高程,水平发射某一频率的声波。根据多普勒频移原理,对发射和接收的信号进行处理,可以得到某一水层的流速分布,将该水层某一水平段的平均流速
(即指标流速)与断面平均流速
(可采用常规流速仪测定)建立率定关系曲线或回归方程,再借助断面水位–面积关系曲线,推算出相应断面流量 [9] 。
H-ADCP的指标流速(
)与断面平均流速(
)的关系:
(1)
在水流较为复杂情况下,也可按照不同的测量单元剖面范围回放处理H-ADCP指标流速数据,建立多组相关模型进行分析,最终确定指标流速与断面平均流速的相关关系。
河流过水断面面积与水位的函数关系:
(2)
根据断面平均流速(1)乘以过水断面面积(2)得到实时流量:
(3)
式中:
为断面平均流速,m/s;
为水平式ADCP指标流速,m/s;H为断面实时水位,m;A为实时水位下断面面积,m2;Q为流量,m3/s。
3. 平台的设计
利用人工转动发轮盘,通过轴连杆带动两个驱动轮转动,一个为上下驱动轮,使行车做上下运动,一个为刹车驱动轮,控制行车上的刹车。手摇发轮盘使行车上下运动时,搬动离合器使上下驱动轮与轴连杆结合,使刹车驱动轮与轴连杆分离,行车上下运动到位后,搬动离合器将上下驱动轮与轴连杆分离,紧固手刹将上下驱动轮固定;同时搬动离合器将刹车驱动轮与轴连杆结合,手摇发轮盘通过轴连杆,带动刹车驱动轮,控制行车上的刹车,将行车固定在轨道上,紧固手刹,把刹车驱动轮固定,搬动离合器使刹车驱动轮与轴连杆分离。由于钢丝绳是固定长度,驱动轮带动钢丝绳的运动,是靠摩擦力的作用,加上钢丝绳的使用及受热胀冷缩的影响,因此需增加一个加力装置。加力装置由一个转向轮和一根槽钢组成。倾斜式H-ADCP安装平台主要包括:钢筋混凝土基座、轨道、行车、H-ADCP安装支架、驱动装置(手摇盘,驱动轮,离合器,手刹)、动力传输系统(转向轮,钢丝绳)、刹车固定装置(偏心轮,轴连杆)等,其构造设计如图1所示。
在河岸边固定两根平行槽钢作为上下移动的轨道,轨道为直线倾斜式,轨道的长度,倾斜角度根据河岸地形而定,设计如图2所示。在轨道上安装一个行车,行车可以沿着轨道上下运动,行车与轨道采用紧密接触式,到仪器安装位置后固定。在行车上方安装H-ADCP探头,用三根可调不锈钢螺栓固定H-ADCP探头,可以上下、左右调节H-ADCP探头的方位。行车上下分别固定一根钢丝绳的两端,钢丝绳通过岸上转向轮,驱动轮组成一个回路,驱动轮的转动,带动行车作上下循环运动。
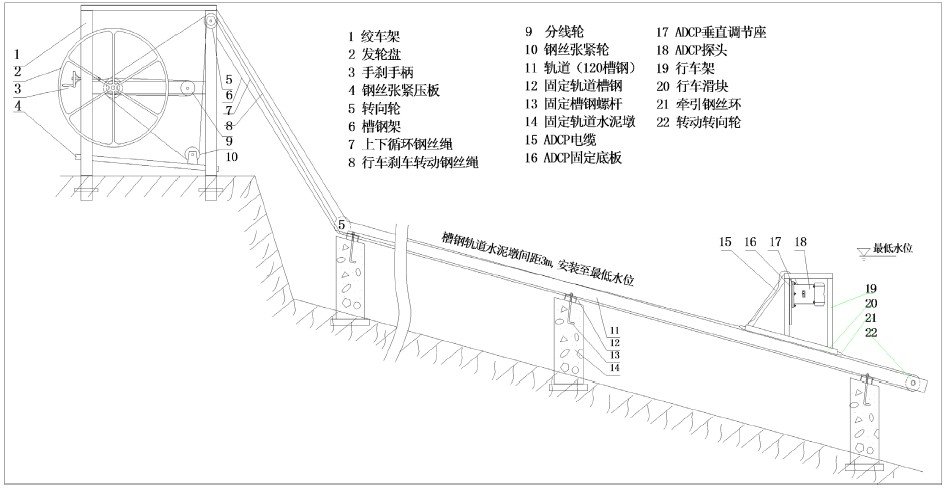
Figure 1. General design of inclined H-ADCP installation platform
图1. 倾斜式H-ADCP安装平台设计总图
轨道:采用两根平行的镀锌槽钢,轨道长度不受限制,根据需要而定,轨道外宽为600 mm,内宽为500 mm,轨道固定在底座的槽钢上,轨道低端封闭,安装两个转向轮,轨道的顶端与绞车支架相连。轨道要求:平行、平整、直线、接缝进行处理。

Figure 2. Design drawing of traction wire rope winding for rolling stock
图2. 行车牵引钢丝绳缠绕设计图
行车:为0.6 * 0.6 m平板支架,支架上设有垂直于水平方向的钢板,用于安装H-ADCP探头,并设有探头保护装置。行车与轨道为接触式滑动,行车的上下两端与上下牵引的不锈钢钢丝绳连接。行车下方安装有刹车装置,并与绞车控制刹车的不锈钢钢丝绳连接。
转向轮:共有10个转向轮,由于有两个转向轮长期泡在水中,考虑到锈蚀和卡沙等原因,采样无轴承转向轮,用120 mm的尼龙棒加工转向轮直接套在不锈钢轴上,即可解决了锈蚀和卡沙的问题,又减少了维护工作。
在轨道的低端安装2个转向轮,在顶端转弯处安装4个转向轮,绞车安装2个分线轮,加力装置安装2个转向轮。转向轮为无轴承式,用直径为120 mm的呢绒棒加工而成,轴用直径为25 mm的不锈钢圆材加工。具体设计如图3所示。
绞车由两个双槽式驱动轮(带刹车盘)、离合器、轴连杆、刹车、发轮盘组成。具体设计图如图4所示。
行车的下方安装一套定位的刹车装置(如图5),刹车装置为两根轴及偏心轮组成,轴的两端分别固定一个渐近线式偏心轮,轴的转动,将行车的四个角卡在滑槽上,起到行车的固定作用。两根轴用钢片焊接后分别与一根钢丝绳的两端连接,与前面一根钢丝绳连接及运行方式相同,行车做上下运动时,刹车钢丝绳随行车一起做被动循环运动,行车运动到位,循环刹车钢丝绳,将行车固定在滑槽上。
刹车装置:两根长0.55 m直径25 mm的轴,轴的两头安装偏心轮,偏心轮的最大、最小半径分别为47 mm、35 mm。钢丝绳牵动轴的运动,偏心轮在不同的位置,从而实现固定作用。
绞车:为圆盘式手摇绞车,手摇盘直径1000 mm,传动轴直径40 mm。手摇盘转动带动两个驱动轮转动,驱动轮为双槽,并带有刹车盘,直径为160 mm,驱动轮上设置刹车装置。为了增大驱动力,增设加力装置。绞车上安装了左右移动的离合器,便于驱动轮与转动轴分离。
H-ADCP探头安装在水中,采集断面上一定范围内某一层水流的平均流速,安装时要求牢固、稳定,不能上下、左右晃动,保证纵摇、横遥接近于零,所测得的指标流速才准确。当H-ADCP出现故障时,则绞出水面于陆上维修。
4. 技术参数
1) 轨道外宽60 mm,内宽500 mm。
2) 转向轮直径120 mm,不锈钢轴直径25 mm,驱动轮直径180 mm。
3) 行车为600 * 600 mm平板式ADCP探头安装平台。
4) 不锈钢钢丝绳直径4 mm。
5) 平台制作材料:该平台主要材料:采用120 mm的镀锌槽钢,直径为4 mm的不锈钢钢索,直径为φ120 mm、φ180 mm尼龙棒,φ25 mm不锈钢圆材,φ40 mm镀锌管,钢筋混凝土基座。
5. 平台安装与运用
弥陀寺(二)站为国家基本站网,荆江三口分流虎渡河入口控制站,主要为荆江河段及洞庭湖防洪、水资源合理调配、河道整治提供水文资料。目前为水文缆道流速仪法测流,水位流量关系受长江上游洪水涨落和下游回水顶托影响,为绳套型,按流量连时序法布置测次及资料整编。
倾斜式H-ADCP探头平台安装在弥陀寺(二)站基本水尺断面上游3.0 m处。2017年06月21日安装高程为33.82 m,起点距82.4 m;2017年8月12日调整安装高程为34.49 m,断面起点距79.8 m;2018年05月22日调整安装高程为35.05 m,起点距78.5 m。根据三角关系:
(4)
其中:θ为声束夹角的一半(H-ADCP声束夹角一般为1.5˚);x为波束采样的水平距离;y为波束采样平行于水面的垂直高度。
通过式(4)可计算出H-ADCP声束的相应安装高度及测量范围,详见表1及图6所示。

Table 1. Horizontal ADCP measurement range
表1. 水平式ADCP测量范围
由于河道水位变幅较大,H-ADCP探头固定在一个水位级,很难建立良好的水位–流量相关关系,需根据不同水位级调整H-ADCP探头高度,建立对应的水位–流量相关关系;再利用互联网 + H-ADCP,即电脑–VPN–服务器–专用软件对数据进行处理,得到实时流量,可实现流量远程在线自动监测;上传数据与水文整编软件接口,实现在线整编;与局属水情中心连接,即可实现实时流量报汛;也可利用APP便可查询历史及当前逐时水位–流量数据及变化曲线图。
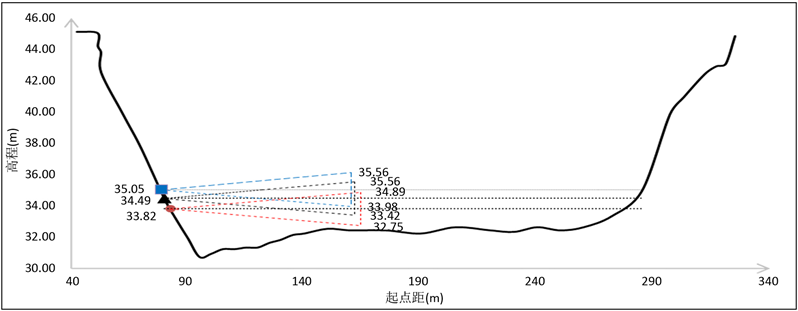
Figure 6. Diagram of H-ADCP measurement range
图6. H-ADCP测量范围示意图
6. 结束语
倾斜式H-ADCP探头安装平台是根据河流岸坡变化设计的一种上下灵活运行的固定式平台,可根据水位涨落的变化,上下移动H-ADCP探头,工程量小,适用性强,安装简单,操作简单,其主要优点:
1) 探头安装平台与轨道采用紧密接触式平行滑道,防止漂浮物或河流泥沙卡死不能上下滑行,增加了行车与滑槽的稳定性,上下运动的灵活性。
2) 行车与轨道采用四角偏心轴刹车定位装置,连接牢固,稳定性好,确保H-ADCP的稳定性,H-ADCP与行车采用平面三点定位调节固定,可以根据H-ADCP的要求,灵活调节纵横摇,提高H-ADCP测验精度。
3) 转向轮采用无轴承,尼龙轮与不锈钢轴直接连接,长期工作在水中,不生锈,不卡沙,运转灵活,不需维护。
4) 该安装平台不受地形及河床条件限制,适用性强。
5) 该平台增加电动自控装置,可实现远程控制H-ADCP探头的上下运行。
6) 整体结构设计合理,建设及运行成本低,且操作简单易于维护保养。
国家重点研发计划专题
堤防工程风险识别和监测预警技术研究(2017YFC1502604),洞庭湖与鄱阳湖多目标调控关键技术(2017YFC405305-1)。
参考文献