1. 引言
海湾战争以来,随着各种高新技术和科学理论的不断涌现和完善,装备的发展呈现网络化、智能化的趋势,无人化装备在军事行动中有了一席之地。近年来,关于无人机袭击和无人机侵入敏感地区的事件屡见不鲜,无人机的发展方兴未艾,必将在未来发挥至关重要的作用。而由于世界各国对于无人机研究的时间普遍较短,加上无人机上应用了多种高新技术,尚未完全成熟的无人机技术使得无人机时常发生故障。无人机的任务可靠性关系着任务的成败 [1],同时,贝叶斯网络在对复杂系统进行研究时,相比于故障树等传统的可靠性分析方法,迭代次数少,计算过程简单,因而更具优势 [2]。本文提出基于贝叶斯网络的无人机任务可靠性建模方法,通过无人机各个分系统的结构框图,建立无人机的任务可靠性框图,并依据各部件之间的依赖关系转化为贝叶斯网络,最后使用Netica软件进行任务可靠性计算。
2. 无人机系统
无人机系统,也称无人驾驶航空器系统,无人机是一种机上无人驾驶、自动程序控制飞行和无线电遥控引导飞行、具有执行一定的任务能力、可重复使用的飞行器。在无人机在飞行或者执行任务的过程中,可能会发生各种各样的事件,这些事件都有可能会导致无人机不能完成其指定的功能。对于单无人机,这些事件包括无人机关键部件的失效与故障,复杂电磁环境对无人机的电子干扰,人造建筑、动物等障碍物对无人机的影响,以及雷电、暴雪、大风等异常环境因素 [3]。
无人机关键部件的失效和故障可利用各部件的故障率、MTBF (平均故障间隔时间)等指标得到。其它的异常和极端环境对无人机执行任务的影响可以分别设置不同情况下的影响参数。见表1,设ka为电磁环境对无人机部件的影响,kb为障碍物对无人机部件的影响,自然环境因素有大风、雨雪、雷电、沙尘暴、寒冷、高温、潮湿、干燥等,设为km。

Table 1. Influence parameters of abnormal and extreme environmental factors
表1. 异常和极端环境因素的影响参数
3. 无人机任务可靠性分析
无人机系统一般包括无人机控制分系统、信息传输分系统、地面测控分系统和任务载荷分系统 [4]。

Figure 1. Structure block diagram of UAV system
图1. 无人机系统结构框图
图1为无人机系统的结构框图,图中,这四个分系统为串联结构,因此任意一个分系统发生故障导致任务失败。
3.1. 控制分系统
通常情况下,无人机控制分系统由飞行器平台、执行机构,以及机载计算机串联组成,其中任意一个发生故障,无人机控制分系统就会处于故障状态。典型的无人机控制系统可靠性框图如图2所示。图中的飞行器平台指飞行器或者无人机,执行机构一般是指用电动机带动控制舵面来将其转化为驱动作用的机构,也包括由发动机以及螺旋桨等动力装置组成的推进系统,推进系统、电动机和控制舵面串联组成了执行机构。容错控制系统和飞控与导航系统是在机载计算机上运行的,只有两个系统都发生故障时,机载计算机才会故障。
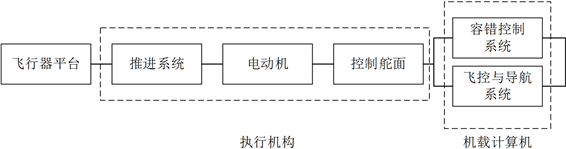
Figure 2. Structure block diagram of a typical UAV control subsystem
图2. 典型的无人机控制分系统结构框图
控制分系统中部件以电子设备为主,故障率为常数,因此各部件可靠性为:
(1)
考虑到环境影响,引入影响参数,可得部件的任务可靠性为:
(2)
式中,t为飞行时间,λi为部件的故障率。
3.2. 信息传输分系统
图3为无人机信息传输分系统的结构框图。无人机的信息传输分系统主要由发射机、接收器和传感器等设备组成。
它们以串联结构相连,任意部件的故障或失效都会造成信息流故障。各部件的任务可靠性Pri为:
(3)
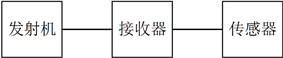
Figure 3. Structure diagram of information transmission subsystem
图3. 信息传输分系统结构框图
3.3. 地面测控分系统
无人机的地面测控分系统有三种工作模式:人工控制、程序控制以及应急程序控制。这三种模式是并联控制的,只有三种模式均失效时,系统才会故障。假设每种模式的任务可靠性为Pki。
3.4. 任务载荷分系统
无人机的任务载荷分系统由为使无人机完成任务而装备的任务载荷组成,不同类型的无人机的任务载荷也不尽相同,其任务可靠性可以通过多次装备实验得到。以无人战斗机为例,其任务载荷分系统的可靠性为其成功打击目标的概率。假设单无人机任务载荷分系统的任务可靠性为Pn。
3.5. 无人机任务可靠性框图
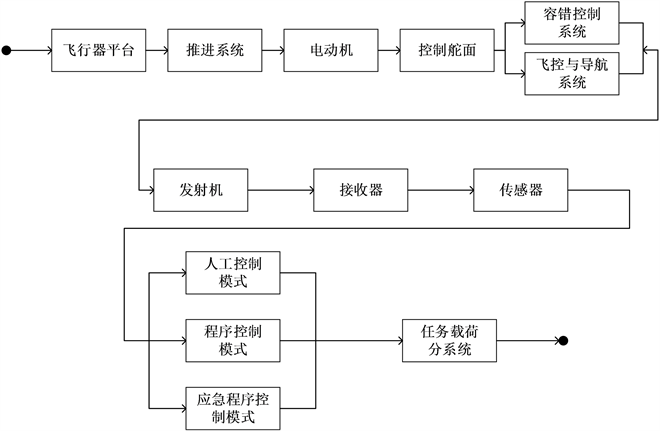
Figure 4. Single UAV mission reliability block diagram
图4. 单无人机任务可靠性框图
图4表示无人机的任务可靠性框图,图中包括了串联和并联两种结构,根据各个系统及部件的任务可靠性和串并联关系,可以得到整个无人机的任务可靠性计算公式为:
(4)
式中Pi表示整个无人机的任务可靠性。
4. 贝叶斯网络模型
4.1. 贝叶斯网络基本理论
贝叶斯网络,也称贝叶斯可靠性网络,它是图论与概率论的结合。它可以表示为一个赋值因果关系图,根据根节点的先验概率分布和非根节点的条件概率分布,在最后得到包含所有节点的联合概率分布。贝叶斯网络是一个有向无环图,它由节点的变量表示,并连接有向弧的节点。贝叶斯使用节点来表示变量,节点之间的有向弧则用以表示变量之间的关系,并以不确定知识的图形化的形式展现出来,通过标注条件概率分布可以表示局部条件依赖性的模型。贝叶斯网络双向推理技术的出现,使其可以应用于计算某些事情发生后的事件T,发生的事件的后验概率用X来表示,特别地,1代表事件发生。后验概率在故障诊断的领域具有反映系统中组件的重要性大小的功能,特别适用于薄弱环节的识别系统、故障诊断或者检查和维修计划。
4.2. 无人机任务可靠性的贝叶斯网络建模过程
4.2.1. 贝叶斯网络的建立
由贝叶斯网络建模方法,根据第2节的可靠性框图可以得到单无人机的贝叶斯网络模型如图5所示,节点表示无人机的部件或系统的任务可靠度,有向线段表示部件及系统之间的依赖关系。用D表示单无人机的任务可靠度;C1、C2、C3和C4分别表示无人机的四个分系统的任务可靠度;B1、B2、B3分别表示无人机平台、执行机构和机载计算机的任务可靠度;B4、B5、B6分别表示发射器、接收机和传感器的任务可靠度;A1、A2、A3分别表示推进系统、电动机和控制舵面的任务可靠度,A4、A5分别表示容错控制系统,飞控和导航系统的任务可靠度。无人机控制分系统、信息传输分系统、地面测控分系统和任务载荷分系统的任务可靠性最终构成单无人机的任务可靠性。
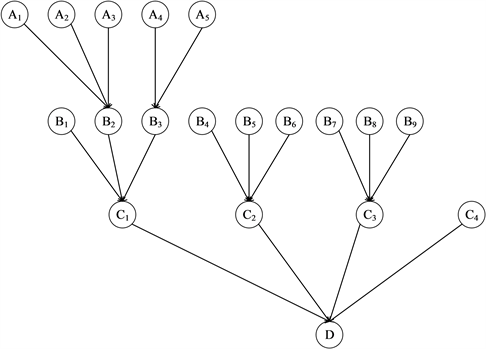
Figure 5. Bayesian network model of UAV
图5. 无人机的贝叶斯网络模型
4.2.2. 贝叶斯网络推理
无人机的贝叶斯网络是通过部件级的已知的任务可靠度计算单无人机的未知任务可靠度的过程。对于单无人机的推理,本文采用正向推理的方法,可得:
(5)
C1和C2分别由B1、B2、B3和B4、B5、B6串联组成,C3由B7、B8、B9并联组成可得:
(6)
(7)
(8)
同理,B2和B3的概率分布为:
(9)
(10)
5. 建模与计算
为验证本文模型的有效性和可行性,本节使用Netica软件进行仿真和计算。预计任务执行时间为20 h,假定各部件的故障概率如表2所示:
Table 2. Failure probability of the original
表2. 原件故障概率
利用第三节建立的无人机的贝叶斯网络模型,使用Netica进行贝叶斯网络的推理,得到无人机的任务可靠性数据。本文假设无人机在执行任务时的平均飞行时间为20 h,代入表2中的故障概率,经正向推理可以得到无人机状态的后验概率如图6所示。贝叶斯网络一般用“1”表示事件发生,用“0”表示事件不发生,但由于Netica中结点状态的设定不能识别数字为首字符,所以设定“yes”为正常工作,“no”为故障。从图中可以看到,单架无人机能在20 h内正常实现指定的功能的概率为89.3%。
6. 结束语
随着无人机技术的发展,无人机必然会有越来越光明的前景。同时,无人机的任务可靠性直接关系到无人机能否实现指定的功能,从上述模型的建模及计算过程中,不难发现,并联系统比串联系统的可靠性更高,因此在无人机的部件特别是关键部件中,采用并联结构,提高其冗余度,是提高无人机任务可靠性的有效途径之一。