1. 前言
与传统的两电平变流器相比,NPC型三电平变流器因具有容量大,输出电压高,电压应力小,开关损耗低等优点而被广泛应用 [1]。但由于NPC型三电平变流器结构较为复杂,有较多的开关器件,这导致NPC三电平变流器更容易发生故障 [2]。因此,开关器件故障是NPC型三电平变流器急需解决的主要问题之一。开关器件故障分为短路故障和开路故障,如果变流器系统中发生短路故障,断路器或熔断器会立即断开电网与变流器系统的连接,以避免系统被破坏 [3]。而开关管发生开路故障虽然不会导致变流系统停机,但却会降低系统性能。因此,研究变流器的故障诊断和容错控制策略显得尤为重要 [4] [5]。
为了提高变流器系统的功率器件在发生开路故障后的安全可靠性,多篇论文提出了各种故障诊断方法。文献 [6] 针对NPC型逆变器提出一种基于电流的诊断方法,通过分析每一个正负半周期的平均电流来定位故障开关,该方法只需要三相电流和简单的计算,然而缺点是诊断时间较长。文献 [7] 提出一种基于模型的算法,通过构建滑模比例积分观测器,通过处理线路电流和电网电压的数据来判断故障状况。文献 [8] 针对单相NPC型三电平整流器,利用实际电流与估算电流之间的残差来检测开路故障。针对三相NPC型整流器,文献 [9]、 [10] 提出了一种基于整流器电压偏差的方法,该方法增加了诊断算法的复杂性,使诊断方法可靠性降低。为了提高故障诊断的准确性和可靠性,文献 [11] 提取多个故障特征信号进行融合诊断。
近年来,对三电平功率变换器的容错控制方法也被相继提出。文献 [12]、 [13] 对三电平逆变器的拓扑进行重构,采用将故障桥臂与直流母线中点相连的容错方法,该方法的缺点是容错后逆变器最大调制度与电压幅值均会降低。文献 [14] 针对三电平NPC和T型整流器外部开关管的开路故障,提出了注入无功电流的容错控制方法,该方法虽然恢复了失真电流,但注入的无功电流降低了功率因数。为了克服这一缺点,文献 [15] 针对三电平整流器外部开关器件故障,提出了一种在参考电压中加入补偿值的容错控制方法。文献 [16] 提出一种附加容错桥臂的有源NPC容错拓扑,可以对功率器件的开路和短路故障进行容错,且可以维持最大调制度不变,但此类方法需要增加额外的冗余硬件,增加了系统成本和复杂度。
综上所述,可以发现目前针对NPC型三电平整流器的故障诊断和容错控制技术的研究较少,且存在算法复杂度高,诊断速度慢,容错后功率因数降低等问题。针对以上问题,本文分析了NPC三电平整流器单个开关管发生开路故障后电流通路的变化,提出了一种基于电流路径的故障诊断方法;接着通过分析整流器开路故障后空间电压矢量的变化,提出一种基于参考电压矢量修正的容错控制方法。最后,通过仿真验证了所提出的故障诊断和容错控制策略的可行性。
2. 故障诊断方法
NPC型三电平整流器的主电路拓扑如图1所示。该整流器的每个桥臂由4个功率开关器件Sx1~Sx2 (x = a、b、c)和2个箝位二极管(VDx1、VDx2)组成,直流侧有两个电容C1、C2。
NPC型三电平整流器每个桥臂可以输出P、O、N三种开关状态,三种开关状态分别对应输出Udc/2、0、−Udc/2三种电压(桥臂中点x到直流侧两电容中点n的电压),见表1。开关状态P表示桥臂上面两个开关器件Sx1和Sx2同时导通,开关状态O表示开关器件Sx2和Sx3同时导通,开关状态N表示开关器件Sx3和Sx4同时导通。桥臂最上面的开关管Sx1和最下面的开关管Sx4被称为外部开关器件,中间的2个开关管Sx2和Sx3被称为内部开关器件。
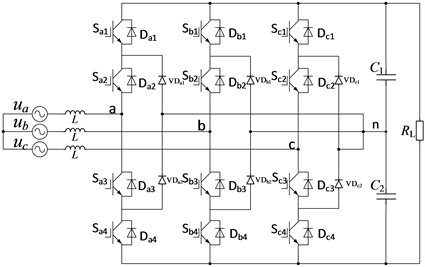
Figure 1. Main circuit of NPC three-level rectifier
图1. NPC型三电平整流器主电路

Table 1. Output voltage and switching state
表1. 输出电压与开关状态
2.1. 外部开关器件故障诊断
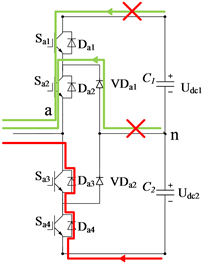
以a相桥臂开关管发生开路故障为例进行说明。当a相桥臂的开关状态为O状态时,开关管Sa2和Sa3导通,当a相桥臂的开关状态为N状态时,开关管Sa3和Sa4导通,此时开关管Sa1发生开路故障不影响桥臂正常运行。如图2(a)所示,当a相桥臂的开关状态为P状态,a相电流ia为正时,电流可以通过Da2和Da1流向直流侧,当电流ia为负时,由于开关管Sa1发生开路故障,导致电流无法经过Sa1,Sa2到达交流侧,所以电流的路径被更改,图中红线表示故障后a相电流ia将经过VDa1与Sa2流向交流侧,此时桥臂的开关状态由P状态切换到O状态。a相桥臂电压Uan为零。
如图2(b)所示,当开关器件Sa4发生开路故障时,处于N状态下的a相正电流流通路径被改变,图中红线表示故障后a相电流ia只能经过Da3和VDa2到达n点,开关状态也由N状态切换到O状态。
由以上分析可以得到判断Sa1发生开路故障的依据:a相桥臂处于P状态下,a相电流ia为负时,Uan为零且箝位二极管VDa1上的电流i_VDa1不为零。同理,可以得到Sa4发生开路故障时的依据:a相桥臂处于N状态下,a相电流ia为正时,Uan为零且箝位二极管VDa2上的电流i_VDa2不为零,判断依据如表2所示。
 (a)
(a)  (b)
(b)
Figure 2. Current path of external switch before and after open circuit: (a) Sa1 open circuit; (b) Sa4 open circuit
图2. 外部开关器件开路前后的电流路径:(a) Sa1开路;(b) Sa4开路
Table 2. The judgment basis of open-circuit fault of external switching devices
表2. 外部开关器件开路故障判断依据
2.2. 内部开关器件故障诊断
当整流器Sa2发生开路故障时,并不影响N状态(Sa3、Sa4导通)下的a相桥臂正常运行。当a相电流ia为正,a相桥臂处于P状态时,电流经过Da2与Da1流向直流侧;当a相电流ia为正,a相桥臂处于O状态时,电流经过Sa3与VDa2流向电容中点n,故Sa2开路故障只影响电流为负时,开关状态为P状态或O状态的a相桥臂。如图3(a)所示,当a相电流ia为负时,电流路径被改变,图中红线表示故障后电流将经过Da4和Da3流向交流侧,这意味着故障桥臂的开关状态无论是P状态或O状态都将切换成N状态。
如图3(b),当Sa3发生开路故障时,处于O状态或N状态的a相正电流的路径都将被改变,图中红线表示故障后电流将经过Da2和Da1到达直流侧,开关状态O或N都将切换成P状态。
由此可以得到Sa2发生开路故障的依据:a相桥臂处于P状态或者O状态下,a相电流ia为负时,Uan的值为−Udc/2且箝位二极管VDa1上的电流i_VDa1为零。同理,可以得到Sa3发生开路故障的判断依据:a相桥臂处于N状态或者O状态下,a相电流ia为正时,Uan的值为Udc/2且箝位二极管VDa2上的电流i_VDa2为零,判断依据如表3所示。
 (a)
(a) 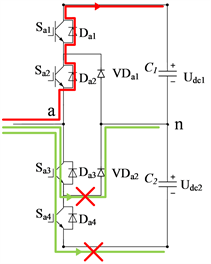 (b)
(b)
Figure 3. Current path of internal switch before and after open circuit: (a) Sa2 open circuit; (b) Sa3 open circuit
图3. 内部开关器件开路前后的电流路径:(a) Sa2开路;(b) Sa3开路
Table 3. The judgment basis of open-circuit fault of internal switching devices
表3. 内部开关器件开路故障判断依据
3. 容错控制方法
当NPC三电平整流器运行在单位功率因数下时,外部开关器件Sx1和Sx4发生开路故障对整流器的影响很小,并不会影响整流器正常运行,故本文只考虑对整流器内部开关管器Sx2或Sx3单管发生开路故障进行容错。首先将电压空间矢量划分为12个大区,如图4所示。
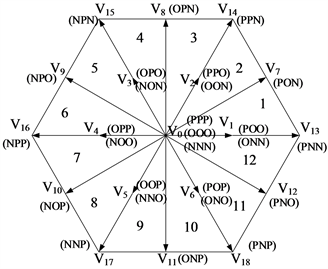
Figure 4. 12 partitions of space voltage vector
图4. 空间电压矢量12分区
NPC型三电平整流器的参考电压矢量可以利用SVPWM来实现。参考电压矢量V*可以由式(1)中的三个电压矢量组合而成。
(1)
其中,Ts是采样周期,T1是矢量V1的作用时间,T2是矢量V2的作用时间,T0是小矢量Vn和Vp的总时间,α是T1在采样周期Ts中的占比,β是T2在Ts中的占比,γ是T0/2在Ts中的占比。根据参考电压矢量V*畸变的情况,将Sa2发生故障后的容错方法分为两种情况:情况1是故障参考电压矢量仍然在原来的大区;情况2是故障参考电压矢量被扭曲到别的大区。本文将对图4中的4、5、6扇区进行故障分析,7、8、9扇区与4、5、6扇区对称,用同样的方法可以得到容错控制方法。
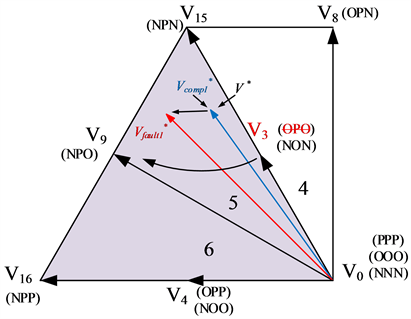
图5(a)的紫色区域显示了情况1下的参考电压畸变,情况1下只有一个电压矢量发生畸变。此故障是当参考电压处于5、6大区时引起的。以第5扇区为例进行说明。故障发生前,参考电压是由V3、V9、V15三个电压矢量合成的,如图5(a),参考电压矢量方程为(2)。
(2)
当开关管Sa2发生开路故障时,故障桥臂的开关状态切换成了N状态。因此,小矢量V3p(OPO)将损失。损失的电压矢量V3p(OPO)被转换成了中矢量V9(NPO),故参考电压矢量V*被扭曲成了故障参考电压矢量
,如图5(b)所示。故障参考电压
可以表示为式(3)。
(3)
在故障情况1下,损失的电压矢量是V3p(OPO),是小矢量,而NPC三电平整流器的小矢量都有冗余矢量,可以通过图5(c)中的方法增加小矢量V3n(NON)的切换时间,以此来恢复扭曲的参考电压矢量。修正后的参考电压矢量
如(4)所示。通过本文提出的容错算法,可以将在故障情况1下失真的参考电压矢量恢复到正常运行时的参考电压矢量。当故障参考电压矢量处于第6扇区时,容错方法与第5扇区相同。
(4)
 (a)
(a) 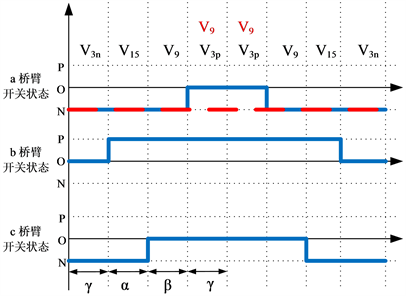 (b)
(b) 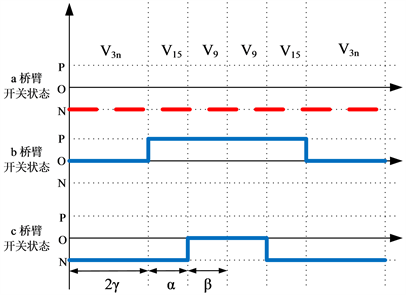 (c)
(c)
Figure 5. Reference voltage vector and switching mode in case 1: (a) distortion and correction of reference voltage; (b) switching mode in fault condition; (c) fault-tolerant switching mode
图5. 情况1下的参考电压矢量与开关模式:(a) 参考电压的失真与修正;(b) 故障状态下的开关模式;(c) 容错后的开关模式
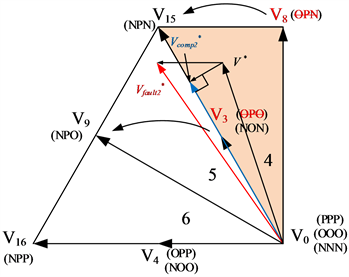
故障情况2如图6(a)所示。在故障情况2下,当正常运行的参考电压矢量位于第4扇区时,合成参考电压矢量的3个电压矢量将会损失2个:V3p(OPO)和V8(OPN)。如图6(b)所示,这两个矢量将被强制转换为中矢量V9(NPO)和大矢量V15(NPN),参考电压矢量将被扭曲到第5扇区,并由矢量V9、V15、V3合成,此时参考电压矢量的修正将被限制在第5扇区,故无法完美修正错误的参考电压矢量。
然而,此时可以对扭曲的参考电压矢量进行部分修正。如图6(a)所示,正常处于第4大区的参考电压矢量正交投影到电压矢量V3和V15的连线上,可以通过将故障参考电压矢量修正成为该投影矢量来减小故障影响。参考电压矢量V*,故障参考电压矢量
和修正后的参考电压矢量
见式(5)-(7)。容错后的PWM开关模式如图6(c)所示。
(5)
(6)
(7)
 (a)
(a)  (b)
(b) 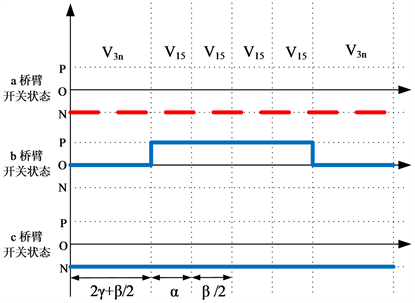 (c)
(c)
Figure 6. Reference voltage vector and switching mode in case 2: (a) distortion and correction of reference voltage; (b) switching mode in fault condition; (c) fault-tolerant switching mode
图6. 情况2下的参考电压矢量与开关模式:(a) 参考电压的失真与修正;(b) 故障状态下的开关模式;(c) 容错后的开关模式
表4给出了开关管Sa2正常、故障容错后4、5、6扇区的电压参考矢量。4、5、6大区的容错控制方法可以对称的应用在7、8、9大区。如果开关管Sa3发生开路故障,容错控制的区域与Sa2开路故障的区域关于零电压矢量对称。
Table 4. Reference vectors for sectors 4, 5, 6
表4. 扇区4、5、6的参考矢量
4. 仿真结果
为了验证所提的故障诊断和容错控制算法的正确性和有效性,在Matlab/Simulink中搭建容错NPC三电平整流器模型。系统仿真参数:输入相电压为220 V、50 Hz,滤波电感L为10 mH,开关频率为2.5 kHz,直流侧电容C1 = C2 = 1200 μF,输出电压Udc为800 V,负载电阻为26.67 Ω。在0.15秒时给a相桥臂的开关管Sa2施加开路故障信号。设置故障诊断输出结果为1、2、3、4,分别对应a相桥臂开关管Sa1、Sa2、Sa3、Sa4发生开路故障。
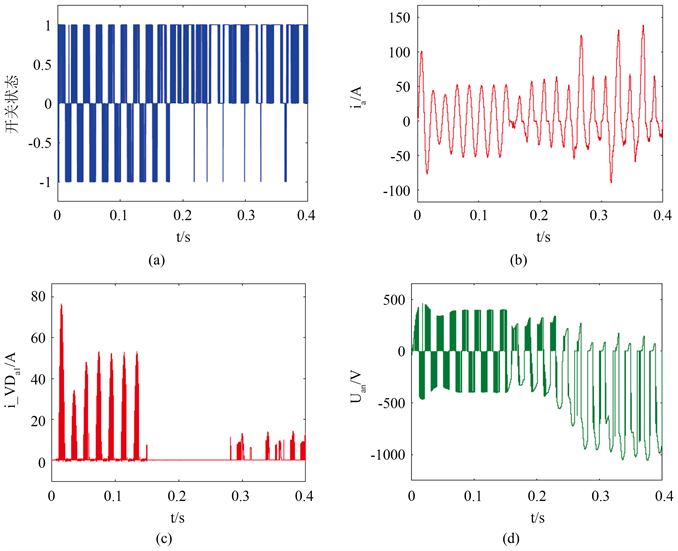

Figure 7. Sa2 fault diagnosis: (a) a phase bridge arm switch state; (b) a phase current ia; (c) clamp diode current i_VDa1; (d) a phase arm voltage Uan; (e) fault diagnosis results
图7. Sa2故障诊断:(a) a相桥臂开关状态;(b) a相电流ia;(c) 箝位二极管电流i_VDa1;(d) a相桥臂电压Uan;(e) 故障诊断结果
如图7(a)所示,“1”表示开关状态P,“0”表示开关状态O,“−1”表示开关状态N。当故障发生0.6 ms后,a相桥臂的开关状态为P状态,a相电流ia如图7(b)所示为负。箝位二极管VDa1上的电流为0,a相桥臂电压Uan = −Udc/2,分别如图7(c)、图7(d)所示。最后故障诊断输出如图7(e)所示为“2”,表明a相桥臂的开关管Sa2发生了开路故障,与上文分析一致,验证了本文所提出的故障诊断方法的有效性。
图8为a相桥臂Sa2发生开路故障后无容错算法和切换容错算法的三相网侧电流和直流侧电压的仿真波形。表5为三相交流侧输入电流在不同状态时的总谐波畸变率。如图8(a),当Sa2发生开路故障且没有容错算法时,交流侧三相电流出现严重的畸变。如图8(b)所示,在Sa2发生开路故障切换容错控制后,三相输入电流能基本保持较好的正弦运行,三相电流的THD也降低了。如图8(c)所示,故障发生后直流侧电压出现了剧烈的波动。经过容错后如图8(d)所示,电压波动明显减小,整流器的性能略微降低,但能够继续稳定工作。
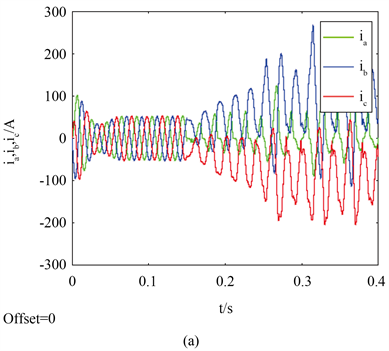
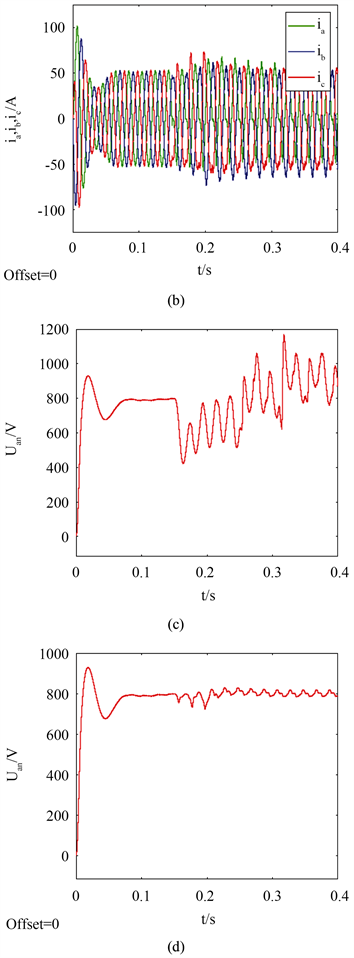
Figure 8. AC side three-phase current and DC side voltage waveform: (a) three phase current waveform before and after fault; (b) three-phase current waveform before and after fault-tolerant control; (c) voltage waveform of DC side before and after fault; (d) voltage waveform of DC side before and after fault-tolerant control
图8. 交流侧三相电流和直流侧电压波形:(a) 故障前后三相电流波形;(b) 容错控制故障前后三相电流波形;(c) 故障前后直流侧电压波形;(d) 容错控制故障前后直流侧电压波形
Table 5. THD of three-phase current
表5. 三相电流的THD值
5. 结论
通过仿真结果表明,本文所提出的故障诊断技术通过比较不同电流路径下的故障特征,能准确快速地诊断出故障开关器件;所提出的容错控制通过修正失真的参考电压矢量,使开关管发生开路故障的影响显著减小,改善了三相输入电流的不平衡和畸变,降低了直流侧电压的波动,有效提升了系统的安全性和可靠性,且无需增加额外的设备,降低了系统容错的成本。
NOTES
*通讯作者。