1. 引言
多普勒雷达在智能汽车驾驶、弹道导弹拦截,舰船运动目标跟踪定位等领域有重要应用 [1] [2] [3] [4]。雷达的多普勒效应是《大学物理》《通信电子线路》和《信号与系统》课程均有涉及的一个重要概念 [5] [6]。目前,在课堂教学环节对多普勒效应的讲解尚多拘泥于数学公式的推导与分析,学员难以对多普勒效应有一个直观的理解和认识。
针对上述理论教学中存在的问题,本文基于10.525 GHz X波段雷达收发(Transceiver)模块、步进电机、电动滑台、数据采集板卡DAQ、仪用放大器和工控机IPC等硬件平台,并结合FFT频谱分析方法搭建了一款CW雷达中频(Intermediate Frequency, IF)信号产生、放大、采集与处理的实验系统。直观揭示了CW雷达多普勒测速的底层细节问题,具有较好的实验教学演示效果。实验结果表明,低速目标径向运动速度的测试结果与理论计算值的相对误差小于1%。此外,该实验装置采用开放式架构,可供学员进行二次开发,有利于提高综合利用专业知识解决工程问题的能力。
2. CW雷达多普勒测速原理
CW雷达测速的基本原理是大家所熟知的多普勒效应:当运动目标接近雷达时,回波信号频率相对于雷达发射信号频率变高;目标远离雷达时,回波信号频率变小。雷达发射信号与回波信号频率的差值定义为多普勒频率(Doppler Frequency):
(1)
式中,
为目标相对于雷达的径向速度,λ为雷达发射波波长。一般约定目标远离雷达时fd为负,目标接近雷达时fd为正。可见,在雷达发射波长λ已知的情况下,若能测得多普勒频率fd即可通过上式得到目标的径向运动速度
。亦可看出,在CW雷达发射波长一定的情况下,测速精度主要取决于普勒频率fd的识别精度。
设CW测速雷达发出的单频电磁波信号为:
(2)
式中,Atm为雷达发射电磁波信号幅值,
为发射电磁波信号角频率。设其初始相位为零并不影响推导结论。探测目标反射回来的回波信号:
(3)
式中,
为回波信号幅值,
为回波信号角频率,
为回波信号相对于发射信号的相位差。将回波信号连与发射信号输入到相乘器,设相乘系数为1,有:
(4)
式中,第一项为和频分量(高频分量),可由LPF低通滤波器滤除;第二项为差频分量(低频分量),可由低通滤波器保留。在雷达专业领域,该差频分量又被称作中频IF信号。
完整的CW雷达多普勒测速数据流程如图1所示:IF信号的主瓣频率即为多普勒频率,可由FFT运算得到,带入公式(1)即可换算出目标相对于雷达的径向运动速度。需要说明的是,雷达回波信号不可避免的含有环境噪声,需要在雷达接收天线后端接入低噪声的小信号谐振放大器。
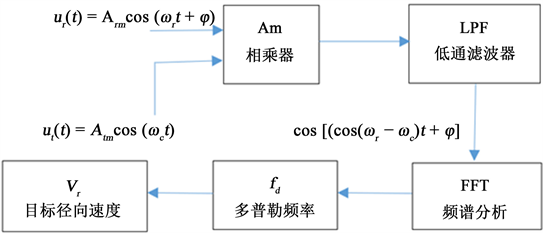
Figure 1. CW Doppler radar velocity measurement architecture
图1. CW多普勒雷达测速原理框图
3. CW雷达多普勒测速实验系统
本文设计的CW雷达多普勒测速系统如图2所示:STC15W4单片机通过Timer中断模式生成不同频率的脉冲信号输入到步进电机驱动器,以驱动步进电机按照不同转速运动。步进电机带动丝杆螺母机构做变速往复直线运动,一块圆形钢板固定在丝杆螺母机构的工作台作为被探测目标,随着丝杆的运动而运动。中心频率为10.525 GHz的X波段CW雷达收发模块固定在实验台上,向目标发射单频连续雷达波,并接收目标反射回来的回波信号。
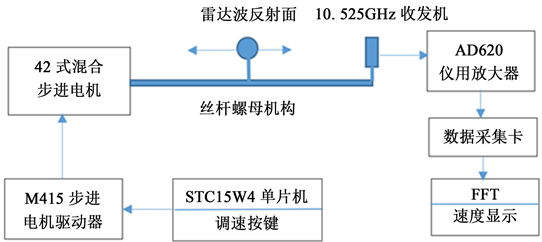
Figure2. CW radar velocity measurement experimental device diagram
图2. CW雷达多普勒测速实验系统框图
雷达发射信号与回波信号经混频器(Mixer)输出的IF信号经仪用放大器AD620放大后,由数据采集卡完成数据采集,经FFT变换得到IF信号的主瓣频率即为多普勒频率。此外,可根据回波信号的振幅变化趋势判断目标的运动方向:振幅逐渐变大表明目标向着雷达的方向运动,反之亦然。

Figure 3. IF signal amplification and acquisition architecture
图3. IF信号放大与采集系统框图
鉴于本文采用的10.525 GHz CW雷达收发模块功率仅有50 mW,有效探测距离为5米左右,输出的IF信号非常微弱。经实际测试,IF信号带直流偏置,峰-峰值约为10 mV,因此需要采用高精度仪用运算放大器对其进行放大。如图3所示,本文采用的是AD620仪用放大器,经100倍放大转化为1.0 V左右的电压信号,再输入到USB接口的16位的高精度数据采集板卡完成数据采集。数据采集与FFT运算程序均在IPC上采用VC++ 2017调用DLL动态链接库的模式编写,可实现IF信号的波形与频谱显示及数据保存,带入公式(1)即可得到运动目标的径向速度。所设计的雷达测速实验装置主要参数如表1所示。

Table 1. CW radar velocity measurement device specification
表1. CW雷达测速实验装置参数
4. 实验结果与分析
在实验过程中将步进电机转速设定在300 rpm,通过按键控制电机的启停与转向。目标物匀速远离雷达约3秒、静止约3秒再匀速靠近雷达,采集到的经100倍放大后的IF信号波形如图4所示。可见,IF信号有1.7 V左右的直流偏置。当目标远离雷达时,IF信号幅值变小;相对静止时,IF信号近似为直线;匀速接近雷达时IF信号幅值逐渐变大。这符合雷达方程所揭示的规律,雷达反射波幅值近似与探测目标距离的平方成反比 [1]。此外,IF信号有明显的高频毛刺现象,这是由雷达回波噪声与电动滑台抖动引起。
去掉直流偏置,对IF信号进行1024点FFT运算,得到的信号频谱如图5所示。其主瓣频率为1.40 Hz,即多普勒频率fd = 1.40 Hz,带入公式(1)得到径向运动速度:
(5)
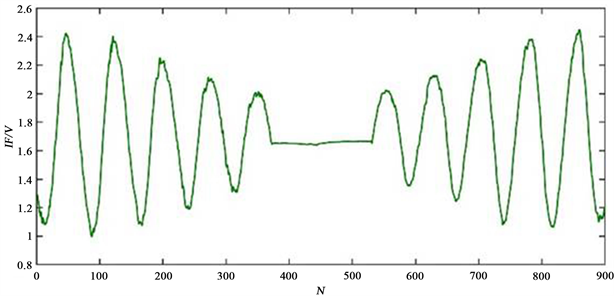
Figure 4. IF signal (×100) with DC bias
图4. 放大100倍带有直流偏置的IF信号
根据实验台运动控制机构参数进行核算:步进电机转速为300 rpm,丝杆螺距为4.0 mm。可得目标物径向速度的理论计算值为:300/60 × 4.0 = 20.0 mm/s,测试误差为(20.0 − 19.95)/20.0 × 100% = 0.25%。
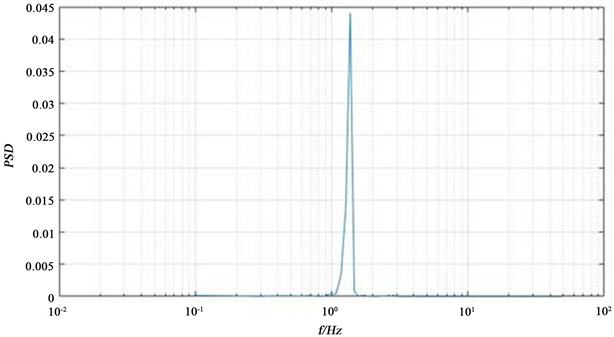
Figure 5. FFT spectrum of radar IF signal
图5. 雷达IF信号的FFT频谱曲线
测速误差主要由FFT分析的栅栏效应以及电动滑台机械运动误差引起。若要获得目标的瞬时运动速度,可对雷达IF信号进行短时傅里叶变换(Short-Time Fourier Transform, STFT),即可得到每一时刻的多普勒频率。目标运动9秒的STFT结果如图6所示,可见在5 s附近的多普勒频率出现明显下降(塌陷),这恰好对应目标从匀速运动状态切换到停止状态。
5. 结束语
本文设计的10.525 GHz CW多普勒雷达测速实验教学装置主要包括丝杆螺母运动控制模块和雷达IF信号采集与处理模块,实验表明对低速目标的运动速度测试误差小于1%。所设计的实验装置涵盖了单片机
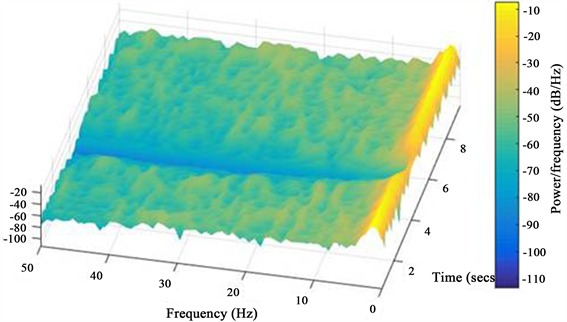
Figure 6. SFFT cloud image of radar IF signal
图6. 雷达IF信号的SFFT云图
Timer中断编程,步进电机控制,VC++编程,FFT分析,雷达混频器与IF信号的调理及其采集等诸多知识点,有助于培养学生综合利用专业知识解决实际工程问题的能力,具有较好的实验教学效果。
该实验装置采用开放式架构,在今后的工作中将增加诸如目标表面材料对雷达波反射强度的影响、电磁噪声对测试精度的影响验等实验科目。