1. 引言
近年来,伴随着卫星通信等信息化科学的快速进步,遥感影像技术凭借数据量大、信息量丰富的独有特点,得到了迅猛发展,在农业、地质、海洋、军事等多个领域都展现出其重要甚至关键作用 [1] 。与此同时,人们对于精准、高效地提取识别遥感影像地物目标的需求也越来越迫切。高分辨率遥感影像,具有更丰富的信息量、更高的空间分辨率、更低的光谱分辨率,以及更加明显的结构和纹理信息,能够提供更为详细的地物目标特征,在为目标识别与提取带来机遇的同时,也带来了新的挑战 [2] [3] 。
遥感影像目标提取是指根据遥感影像数据,通过一系列的图像处理和分析方法,将目标物体从背景中提取出来。传统的遥感影像目标提取方法多是基于像素级的图像分割和分类算法,即通过影像的光谱特征分类,对每个像素点进行独立的处理和判断。然而,由于高分辨率遥感影像受光照变化、噪声干扰、地表地物遮挡等影响,影像目标呈现出较大的复杂性和多样性,单纯的像素级处理普遍存在识别度低、鲁棒性差等问题,难以满足应用需求。因此,更加符合人类视觉系统习惯的面向对象分析方法应运而生 [4] [5] ,并成为当前遥感影像技术应用的重要发展方向。
面向对象遥感影像目标提取技术是一种基于影像分割技术的目标提取和分类方法,通过将像素组织成具有语义信息的图像单元,实现对遥感影像中目标的准确识别和提取。与传统像素级目标提取方法相比,像素级提取方法忽略了像素之间的空间和语义关系,而面向对象提取方法则是将一组相邻的像素组成一个对象,即图像单元,通过对对象的分析和分类,在对传统光谱信息进行分析的基础上,更好的保留了影像目标的空间结构、纹理形状及空间关系等信息,更好的保留了较好的空间连续性和语义一致性,从而大幅提升了遥感影像目标提取的精度和准确度。然而,面向对象遥感影像目标提取技术也存在一些挑战和问题。因此,开展面向对象高分辨率遥感影像目标提取研究,对于提高目标提取准确度,具有重要的理论和实用价值。
2. 面向对象遥感影像目标提取技术
面向对象遥感影像目标提取技术的关键步骤,主要包括遥感影像分割、对象特征计算和分类提取。首先,利用图像分割算法对遥感影像进行分割,形成一系列相互独立且具有一定空间连续性和语义一致性的图形区域;然后,以分割区域作为基本单元,构建目标特征向量,进行颜色、形状、纹理、光谱等具有特征区分性的提取,并与预先定义好的目标类别进行匹配;最后,借助机器学习和模式识别等方法,对目标特征向量进行分类,实现高分辨率遥感影像目标的自动提取和识别。这种面向对象的提取方法,不仅可以提高目标提取的质量和效率,还可以较好地保留目标的空间连续性和形状特征,使得提取结果更加符合实际应用需求。该方法的基本运用流程主要包括影像分割、对象知识库构建、对象特征计算,以及初始目标提取和结果优化等,如图1所示。
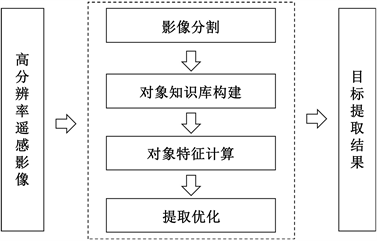
Figure 1. Object oriented goal extraction flowchart
图1. 面向对象目标提取流程图
2.1. 影像分割技术
高分辨率遥感影像中存在大量的信息和细节,如何从中准确地提取出目标物体成为研究热点。影像分割技术作为一种重要的图像处理方法,被广泛应用于高分辨率遥感影像的目标提取中。
影像分割是指将一幅遥感影像中的像素点或区域划分成一系列互不重叠且具有一定语义信息的子区域的过程,它要求每一个子区域中的所有像素均具备某种相似性且两两任意连通,而相邻子区域之间又基于某种预选特性具备显著差异。通过影像分割,可以将遥感影像中的目标物体与背景进行有效区分,减少噪声影响,从而实现目标的精确提取和分析。影像分割技术的关键在于如何选择合适的特征和分割算法。特征选择需要考虑遥感影像的特点和目标物体的集体属性;分割算法众多,尚没有统一的分类标准 [6] ,一般可分为基于阈值的分割算法 [7] [8] 、基于边缘的分割算法 [9] [10] ,以及基于区域的分割算法 [11] [12] 等三大类。本文选用分割算法中较为典型且具有代表性的分水岭变换算法 [13] 进行介绍和实验。
分水岭变换算法是一种形态学影像分割方法,具有较强的噪声抑制能力,广泛应用于计算机视觉和图像处理领域 [14] 。它将目标图像看作是自然界中一个高低起伏的地理分水岭,并呈现为一幅高程地形图,图上每一个点的地势高度代表该像素点的梯度值,高梯度对应分水岭或分水线,即山脊,低梯度对应凹地或盆地。如图2所示。
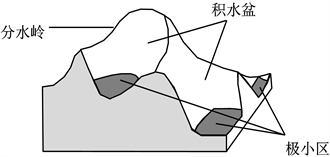
Figure 2. Watersheds and waterlogged basins
图2. 分水岭与积水盆地
常见有两种变换方法 [15] 。
1) 沉浸分水岭变换
这是分水岭变换的典型方式。图像中每一个局部单元都有一个极小值,即为每一个盆地的最低点。设想在每一个最低点开一个孔,地下水将由这个小孔渗入,并在盆地内堆积。随着水位的上涨或地表的向下沉浸,相邻盆地的水将没过山脊交汇在一起。这时,为了防止积水连通,便在山脊处建造堤坝,堤坝高度随水位上升而不断升高,直至与最高的山脊同高时,停止涨水或向下沉浸,此时算法终结,图像分割完成。其中,堤坝即为分水岭线,堤坝围合的每一个区域即为一个分割单元。
2) 降水分水岭变换
将积水盆地定义为满足预设条件的像素集合。假设前述地形图上空开始降水,水滴将沿山脊斜坡滑落至盆地底部形成积水,随着积水上涨,便在山脊处建立堤坝,随积水高度不断升高,直至最高山脊处,依次迭代,最终形成由堤坝分割围合的若干区域。
分水岭变换算法的优点,是能够自动地进行图像分割,无需用户手动指定分割区域,同时,对图像中的噪声和干扰具有一定的鲁棒性。但由于是基于像素点的亮度和颜色特征进行分割,对于图像中亮度和颜色变化较小的目标,往往会产生过度分割的现象。因此,在实际应用过程中,通常需要对图像先进行适当的预处理,如滤波、灰度化、边缘检测等。
2.2. 对象知识库构建
对象知识库是一个存储和组织知识的数据库,其中包含了各种实体、属性和关系的信息。对象知识库构建是一项重要的人工智能任务,其目的是建立一个能够包含丰富、准确和一致的知识数据库,以支持机器对世界的理解和推理。通过建立对象知识库,机器可以从中获取各种实体的相关信息,了解它们的属性和关系,实现对知识的推理和应用。其构建过程可概括为:首先,从网络、书籍、媒体等多来源中收集相当水平质量和规模的文本、图像、视频等数据;其次,借助图像识别、数据挖掘等多种技术和工具,从收集数据中抽取出预期信息;最后,将抽取信息以机器可理解的形式进行表示和存储 [16] [17] 。
遥感影像分割完毕后,需要对图像单元的特征进行计算,并与目标对象知识库中的特征进行比较。遥感影像中图像单元的基本特征一般包括形状、面积、长宽高等几何特征,整体分布不均但局部具有规律的光谱特征,以及局部上下文和全局上下文特征。当提取的某对象的所有特征都匹配库中某已知地物的特征时,即可认为该提取对象属于该目标地物。正因如此,选择合适的地物特征构建知识库,将有助于提高地物目标提取的精度和速率。
2.3. 对象特征计算
对于不同的对象,其特征计算的侧重点往往不同。比如,道路、桥梁等条状地物的几何特征比较明显,而飞机、车辆等移动地物的光谱特征则可能更为突出。在实际应用中,需针对不同目标对象使用不同的特征计算方法。本文主要介绍光谱和几何两种特征计算。
1) 光谱特征计算
将分割对象
的亮度值
定义是为该对象所有像素点亮度的平均值,即光谱特征。计算公式为:
式中,
表示对象
中所有像素的总数,
表示坐标为
的某一像素点的亮度。
2) 几何特征计算
主要包括三类计算。
a) 对象面积的计算。对象面积
计为对象中所有像素点的总个数。
b) 对象与最小外接矩形面积比的计算。对象最小外接矩形是指由各像素点中的最大横坐标、最小横坐标,以及最大纵坐标、最小纵坐标这四个点确定的二维矩形图形 [2] 。其面积比
的计算公式为:
c) 对象长宽比的计算。由于对象存在不同形态,其长宽比的计算方法也不尽相同。当对象形态幅度变化较大、相对弯曲时,定义为I型对象,如图3(a)所示;当对象形态幅度变化较小、相对笔直时,定义为II型对象,如图3(b)所示。
 (a) I型对象 (b) II型对象
(a) I型对象 (b) II型对象
Figure 3. Two object forms
图3. 两种对象形态
经大量验证计算:
① 对于I型对象,借助统计的方法来计算长宽比结果相对准确。即先构建对象
的坐标协方差矩阵
:
式中,
表示对象
所有像素点的横坐标的集合,
表示所有像素点的纵坐标的集合。
设
的两个特征值分别为
、
,并假设
≥
则对象
的长宽比
的计算公式为:
② 对于II型对象,其长宽比
的计算公式为:
式中,
和
分别为对象
最小外接矩形的长和宽。
然而,在实际应用过程中,人们很难精准确定目标对象到底属于I型还是II型。因此,通常做法是,先分别按照前式计算
和
的值,再两相比较取最小 [2] ,即:
3. 目标提取实验
按照本文前述方法和流程进行有效性实验。
考虑到道路目标因形状、结构的特殊性和复杂性,目标提取往往更有难度,这里选取图4(a)所示实验影像为实验对象,力求实验结果更具典型性和代表性。
第一步,对实验影像进行分水岭变换分割。图4(b)所示为优化后的分割结果,观察可得,该道路对象的分割比较完整,目标与其他非目标地物的区分度较高,分割效果较好。
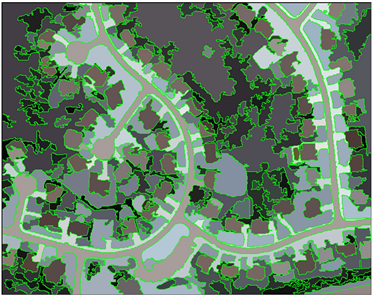
 (a) 实验影像 (b) 最终分割结果
(a) 实验影像 (b) 最终分割结果
Figure 4. Experimental images and segmentation results
图4. 实验影像及分割结果
第二步,对比知识库进行识别提取。根据前述第2节可知,知识库的特征参数应根据地物的类别和具体特征分别设置,不同的参数设置将有可能呈现出不同的提取结果,如图5(a)~(d)所示。可以发现,当参数设置为长宽比
大于1、亮度
介于75和90之间、面积比
小于0.1时,采用知识库可以将道路对象与其它对象进行了最大程度的区分。因此,宜选用此结果作为对象的初始提取结果。

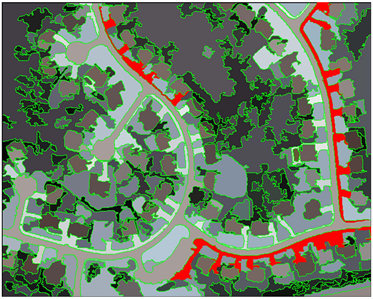 (a) a > 20 (b) a > 20, l > 75, f < 0.1
(a) a > 20 (b) a > 20, l > 75, f < 0.1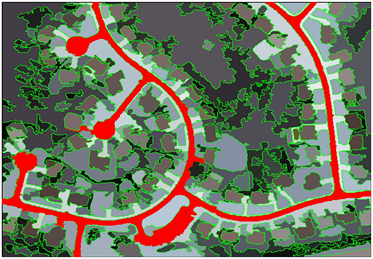
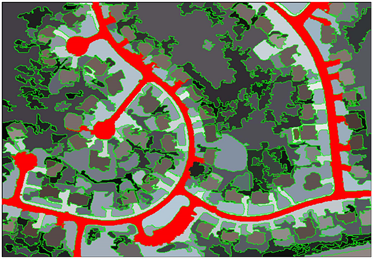 (c) a > 1, l > 75, f < 0.1 (d) a > 1, 75 < l < 90, f < 0.1
(c) a > 1, l > 75, f < 0.1 (d) a > 1, 75 < l < 90, f < 0.1
Figure 5. Road extraction results under different parameter settings
图5. 不同参数设置下的道路提取结果
第三步,对初始提取结果进行优化处理。首先,为更好的区分道路和其他背景,需先对初始结果进行二值化,如图6(a)所示。其次,在二值化基础上,对初始结果进行开运算等形态学处理,进一步分离物体,优化路径,图6(b)所示为滤波优化后的处理结果。然后,对该优化结果进一步细化,提取骨干路网,如图6(c)所示。最后,将细化得到的路网适当加粗,并与原始影像叠加,即为最终的影像提取结果,如图6(d)所示。
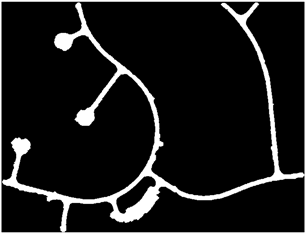
 (a) 二值化结果 (b) 滤波优化结果
(a) 二值化结果 (b) 滤波优化结果
 (c) 道路细化结果 (d) 叠加原图显示
(c) 道路细化结果 (d) 叠加原图显示
Figure 6. Optimisation of the initial extraction results
图6. 对初始提取结果的优化处理
实验结果证明,采用本文提出的面向对象目标提取方法得到的路网完整性好、准确度高,与实际地物基本匹配吻合,达到实验预期目标。
4. 结论
本文针对高分辨率遥感影像中的目标提取问题,提出了一种基于面向对象技术的方法,并通过对道路目标的提取实验,进行了准确性和有效性验证,满足设计需求。面向对象遥感影像目标提取技术是一种有效的遥感影像处理方法,能够实现目标的准确提取和分类。随着遥感影像数据的不断增多和技术的不断进步,相信面向对象遥感影像目标提取技术将在更多领域发挥越来越重要的作用。与此同时,如何将诸如深度学习等新技术应用到目标提取之中,进一步提高目标提取的准确率和智能化,将成为下一步的研究重点。