1. 引言
当前,机械臂的应用技术已逐渐涉及医疗领域 [1] 。利用机械臂代替人工进行核酸采样具有重要意义,一是可以降低医护人员感染的风险。二是提高采集的效率且可以减少人为因素的影响提高采样可靠性。目前核酸检测采样方式主要是口腔咽拭子采样检测 [2] ,医护人员在进行核酸采集时避免不了与患者接触,这往往导致交叉感染的风险提高 [3] 。在咽拭子采集时,其准确度受采集深度、黏膜接触时间等因素影响,而人工采样很难对该因素很难做到精确把握。
目前,国内外公司和机器人研发机构开发的用于新冠病毒的防控工作的机器人产品,主要集中在消毒、配送和远程会诊等方面,核酸采样机器人市场仍处于发展初期,尚未实现大规模应用,研究方向主要包括机器人技术发展、核酸采样方法、传感器与检测技术、消毒与防护措施、实验与应用研究、法规与伦理考虑等 [4] [5] 。相关案例有:2020年5月,清科嘉研究院一代“自助式”核酸采样机完成,并在珠海某医院进行试用,之后完成了三次升级,二十余次硬件实验。测试效率从开始的140 s/次提高到目前的42 s/次。2021年9月4日,在中国国际服务贸易交易会上展示了一台全自动鼻咽拭子取样智能机械人,这是全世界第一台全自动咽拭子取样小型机械人完成无人化,2022年7月12日,第一款由上海高校独立自主研发成功的全程无接触、高度智能化的核酸采样机器人在上海大学宝山校区亮相,该款机械人研究发挥机械、控制等多学科交叉融合的特点。在此背景上本文旨在设计一种基于51单片机的核酸采样机械臂,通过单片机控制机械臂的运动,实现核酸采样的自动化。该机械臂结构简单、操作方便,为核酸采样自动化提供了新的解决方案。
2. 系统设计方案
该方案是基于51单片机设计的一种简单自动核酸采集机械臂装置,主要有硬件设计和软件设计两部分,以KPZ51为控制核心,系统由机械臂模块、语音引导模块、样本保存模块、照明模块和消杀模块构成。机械臂模块:51单片机综合分析系统状态和反馈信号后控制舵机完成指定动作。语音模块:既可以引导被采样者完成采样,又可以进行指令控制。样品保存模块:用以保存样品。消杀模块:在每次采样结束后,消杀模块会对机械臂进行消毒杀菌,保障采样过程的安全性,避免交叉传染。此外,我们在机械臂上安装了照明灯,为一条独立电路,用作照明模块,在光线较暗的情况下,被采样者可以按照提示在采样前手动打开照明灯。本设计主要是通过以机械臂夹取棉签模拟完成核酸采样与保存,设计出合理的旋转角度,夹取力度等参数,从而设定出机械臂系统控制参数。系统结构图如图1所示。
3. 系统硬件及软件设计
3.1. 系统硬件设计
系统主电路图如图2所示。其中手柄接口配合红外接口,可实现对机械臂的遥感控制,PWM接口设置为六个分别连接六个舵机,下排白色接口为传感器接口和红外接口,上排六个白色接口用于单独引线连接语音模块,消杀模块,照明模块则单独设计电源,在单片机上方设置一个USB接口可用于备用:进行上机位操作,程序输入和获取实时工作信息等提高操作的可靠性。
系统核心部分为KPZ51主单片机,实物接线图中红色部分为51单片机。它具有成本低,功率高的优点,此外51单片机一种8位的微控制器,大量应用在嵌入式系统和低功耗设备中。利用51可以实验对机械臂的多样化控制,一是结合语音模块进行简单指令控制,二是结合计算机语音的程序控制,三是利用利用ps2遥感控制。
3.1.1. 机械臂模块
机械臂的组成主要包含舵机、机械臂本体、机械爪和传感器等,具有安全性好等优势,多用于工业生产中,其系统原理框图如图3。来自主电路的输出信号传入机械臂模块,分别进过微型处理器,功率放大电路进入舵机,由舵机转动带动机械臂本体运动,并与本体的输出信号构成闭环系统。本模块实现的功能是:在给定采集信号后,机械爪在六号舵机的驱动下夹取棉签,并配合其余转轴进行核酸的采样,在完成采样后,机械臂将采样的咽拭子放到样品保存模块中,完成一次采样后机械臂将回到初始位置。机械臂的运动速度是根据各个分任务的不同区间来分别设置速度值。在距离人较远的自由空间中,为了节省采样时间,速度设置为最快;在与机械臂插拔的接触操作过程中,速度与自由空间相比是较慢的;在进入人体口腔内进行采样的过程中,速度是最慢的,一方面是为了确保不会对人体口腔造成伤害,另一方面是为了保证咽拭子采样的质量。此外,机械臂末端安装传感器,可以实时检测与口腔内壁的接触力,从而保证不会对人体口腔造成伤害。

Figure 3. Robotic arm control principle diagram
图3. 机械臂控制原理图
本设计选用6自由度的机械臂,机械臂外形如图4所示,1号舵机控制底座的旋转,2号舵机为大臂的转动,3号舵机为小臂的转动,该三个舵机可以用做确定机械臂的空间位置;4号舵机为手腕的上下摆动,5号舵机为手腕的左右摆动,6号舵机可控制的张合。
舵机是一种伺服电机,是机械臂转动控制的执行机构,一般由控制电路、马达、齿轮组、传感器组成。其工作原理是当PWM信号输入后与传感器反馈的转速信号形成偏差信号进入控制电路,控制电路输出电压对直流电机进行转动调控。在不同的脉冲宽度下对应有不同的旋转角度,一般情况下,脉冲宽度部分一般为0.5 ms~2.5 ms,在给定范围内的角度控制脉冲触发,总间隔为2 ms。当脉冲宽度为1.5 ms时,舵机旋转至中间角度,大于1.5 ms时舵机旋转角度增大,小于1.5 ms时舵机旋转角度减小。舵机分90˚、180˚、270˚和360˚的舵机,以180˚的舵机为例来看看脉冲宽度与角度的关系,当输入周期为20 ms的脉冲信号时,在第一个脉冲作用下,其脉冲宽度为0.5 ms会对应产生一个舵机输出轴转角为−90度,接着第二个脉冲宽度为1 ms时对应的输出为−45˚,以此类推,每0.5 ms宽度对应一个45˚的输出轴转角。
3.1.2. 语音模块
信息交流离不开语音传递 [3] [6] [7] [8] [9] ,采用语音模块兼顾了人文关怀,可引导使用者完成采样,方便特殊群体进行核酸采样并且可以实现语音控制。语音模块采用的是一块STC11单片机作为微型控制器,再结合一片LD3320进行识别。其特点是功率低,成本低,携带方便等。此外,为了对声音进行放大处理还配合了功率放大电路。该模块的功能是对被采样者的声音进行识别,并对声音及时做出反应,以及用以引导被采样者。如表1所示为机械臂语音控制基本指令,指令由开源代码设定。

Table 1. Basic instructions of voice module
表1. 语音模块基本指令
3.1.3. 消杀模块
消杀模块是利用紫外线灯对机械臂工作环境进行消毒杀菌。故本模块选用基于Far UV-C (远紫外线)的消毒技术,即200~230 nm波段的短波UV (紫外线)作为光源,固定在机械臂旁边,在机器手臂进行下一轮采样时,先进行灭菌处理消毒手段,可以减少交叉感染。据Far UV-C对流感病毒、冠状病毒的杀菌有效性研究显示:该项技术对于冠状病毒消杀效果良好,且成为近年来受到高度关注的能杀菌消毒又对人体安全无害的热点技术。在完成核酸采集工作后机械臂Far UV-C消毒灯对核酸检测环境进行照射消毒,以此减少交叉感染的风险。在实际采样过程中采样人群之间一般会保持一定距离,且采样的人员较多,因此消杀模块灯的使用面积较小,使用频率高,在本模块设计中选用小功率光源进行安装 [6] 。
3.1.4. 样本保存模块
储存样本的模块主要由灭活病毒保存液组成在采样后机械臂会将样本放入装有红色药水的灭活保护液内。保存选取常温保存的方式,需要注意的是咽拭子的常温保存不得超过4小时,需要在有效时间送往实验室以保证结果的准确性。
3.1.5. 照明模块
由于病毒的爆发存在偶然性,在面对突发状况时就需要及时进行核酸检测,因此面对光线较暗的环境时,机械臂很难准确感应到检测位置来完成采样工作,为了弥补这一缺点,可以采用无电解电容照明LED驱动装置 [7] 用来作为照明模块,该装置可以做到延长LED使用寿命,增到照明亮度,可以满足普通照明需要也可以配合机械臂在黑暗环境中的采样。
3.2. 软件设计
此模块设计选取Keil 5为开发软件,采用C语言和开源代码设计出如图5所示的系统主程序流程图。其中,定义初始条件为机械臂完全直立状态(垂直于底座)且被采样者需要处于指定窗口。当主程序进入工作状态后,控制器会先读取传感器反馈的相关参数判断是否可以进入下一环节,若不满足条件系统会对对机械臂初始状态进行校验和对被采样者进行语音提醒,当满足进入条件时,系统会根据被采样者发出的相关指令进行操作,并在接下来的每个环节进行实时语音播报(图中未画出),最终完成一个采样操作循环。
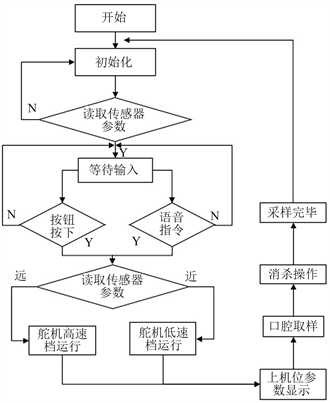
Figure 5. System main program flow chart
图5. 系统主程序流程图
系统可根据采样人员的不同的指令对出相同的响应。当系统接收到被采样者按下“开始采样”按钮的信息,或读取到采样语音指令后,会进入下一环节并在该环节判断与被采样者口腔之间的直线距离,随后做出相应处理,若机械臂距被采样者直线距离较远,舵机则以高速档运行从而加快采样速度;若机械臂离被采样者距离较近,舵机则选择低速挡转动以减小安全隐患。舵机旋转到固定角度时在上机位显示状态信息,随后处理器和控制器判断棉签与口腔接触力,根据接触力调整采样流程,依次进入口腔取样、消杀操作,最后采样完毕回到初始状态。
4. 结语
基于51单片机的机械臂设计具有自动化、高效化、精确化的特点,可实现对核酸样品的自动采集、存储和运输,具有灵活性高,成本低,功耗小,可维护等优势,对于提高核酸采样效率和质量具有重要意义,其推广使用不仅能缓解医护人员短缺的难题,还能降低病毒感染的风险,在我国疫情防控领域的发展前景十分广阔。可以减轻医护人员的工作强度和精神压力,提高采样效率。此外,随着智能自动化时代发展趋势,此设备在其他行业也会有极大发展空间。
该机械臂装置是一种主要针对口腔内核酸检测而开发的自动化系统。整体上包括机械臂模块、语音引导模块、消杀模块、照明模块和样本保存模块,适应包括酒店、车站、社区、医院等在内的多个场景。但是,由于该系统还未对人体进行过取样,所以不能给出与取样精度有关的数据。在此基础仍需要对机械臂采样、保存过程进行进一步完善,以提高采样的精确度。
基金项目
大学生创新创业训练项目编号(2022A026; S202211390013)。
NOTES
*通讯作者。