1. 引言
近几十年,中国城镇化进程迅速、城市建筑密集,城市排水系统是否畅通,不仅关乎城市排水,更影响广大市民的生活。因此,城市排水管道素有城市地下“生命线”之称。目前,管道清淤机器人成为城市排水管道清淤的最新发展趋势。清淤机器人在管内恶劣环境下,沿管道自主行走、携带作业装置进行清淤检测。轮式驱动因在直管中具拖动力大、效率高、运动平稳和结构简单等特点而成为管道机器人的主要驱动方式[1 ,2]。但由于地下管道工况复杂,轮式机器人要顺利地实现行走、越障和作业等功能,设计的关键在于机器人位置的准确定位、姿态及管道内环境的判定和识别等问题。目前,大部分管道机器人对该问题的解决取决操作者对环境的识别,机器人对自身状态参数及外界环境的自主性较差。
为解决管道清淤机器人的运动状态参数及管道环境的自主识别问题,本文基于模块化和参数化的设计思想,将一种模糊控制算法应用于管道清淤机器人的系统设计。首先介绍了轮式管道清淤机器人的本体结构,控制系统组成,工作原理;进而对机器人在管内清淤时的运动学的有关问题进行了详细的分析研究,求得了管道对各驱动轮速度的约束关系;为实现机器人的自主行为功能,建立了传统PID控制器与基于模糊神经网络的模糊控制器的混合控制系统;搭建相应的试验环境,对研制的机器人样机进行试验研究。对算法的相关控制参数设定对设计结果的影响进行了具体分析,为进一步研究管道机器人打下基础。
2. 机器人的结构组成及工作原理
2.1. 管道机器人的结构
城市下水管道的清淤是一项实用化工程,为满足应用需求,清淤机器人的本体结构设计除考虑作业、运动基本功能外,还需解决牵引力调节,管径适应,运动干涉等难题。本文基于模块化和参数化的设计思想,将机器人按功能划分为机器人本体和控制系统两部分。
机器人本体包括行走机构、支撑机构、清淤机构、机身4个模块,各模块可整体安装和拆卸,便于机器人的制造、工程应用和推广。本体采用轮式行走机构如图1(a)所示,后轮11为驱动轮由电机8通过传动装置12驱动,其中电机,减速器和里程计一体化安装;支撑机构采用螺旋传动13和四杆机构14来适应不同的管径。四杆系统由主连杆、副连杆、拉杆及机器人本体构成一个平行连杆机构;清淤机构由刀具1和推泥板10组成,实现管道内污泥的切削和清除。驱动电机8的力矩由蜗杆传至蜗轮,蜗轮回转轴与机壳相联结。同时,电机与机壳相联,电机传出的转动力矩完全由机壳内平衡,保证机器人运动过

Figure 1. The sketch of the pipeline dredging robot
图1. 管机器人的结构简图
程中自主轴向移动特性。
控制系统为传统PID控制器与基于模糊神经网络的模糊控制器的混合控制系统,按功能分为传感器模块、驱动模块、模糊控制模块和通讯模块四部分。驱动模块执行运动指令实现机器人的运动;传感器模块主要包括超生波传感器,视觉传感器,力传感器等,实现各种数据采集;模糊控制模块采用上、下位机模式提高机器人的控制能力和数据处理能力。下位机处理驱动轮的运动控制,上位机负责任务管理、机器人控制和人机接口传感器数据采集和处理。在工作过程中,上位机根据任务和环境信息确定当前的运动参数然后把这两个参数发送给下位机,并通过PID控制驱动器,实现车轮的转动。具体的控制方案如图2所示。
2.2. 管道机器人的运动分析
由于机器人系统的回转中心与几何中心并不重合,针对不同的工作环境,建立两种运动模型即基于几何中心的运动模型和基于回转中心的运动模型,机器人的坐标系统如图3所示, 为全局坐标系。
为全局坐标系。
设驱动轮轴线的中点c为机器人系统的回转中心,以c点为机器人系统的动坐标系原点,建立基于回转中心的运动模型为:
 (1)
(1)
 :回转中心在全局坐标系的X轴方向的速度;
:回转中心在全局坐标系的X轴方向的速度;
 :回转中心在全局坐标系的Y轴方向的速度;
:回转中心在全局坐标系的Y轴方向的速度;
 :机器人绕回转中心的旋转角速度;
:机器人绕回转中心的旋转角速度;
 :机器人绕回转中心的旋转角速度;
:机器人绕回转中心的旋转角速度;
 :机器人前进的速度。
:机器人前进的速度。
大部分轮式机器人均采用基于回转中心的运动模型。但在某些工况如机器人通过狭长曲折的路径或者绕着物体的曲线轮廓运动时,以机器人的几何中心为坐标原点建立运动模型就可以顾全机器人的轮廓影响,控制机器人中心的轨迹。
设点o为机器人系统的几何中心,以o点为机器人系统的动坐标系原点,当满足非完整约束条件时[3] 几何中心o的速度为:
 (2)
(2)
 :几何中心在全局坐标系的X轴方向的速度;
:几何中心在全局坐标系的X轴方向的速度;
 :几何中心在全局坐标系的Y轴方向的速度;
:几何中心在全局坐标系的Y轴方向的速度;

Figure 2. The scheme of control system
图2. 控制系统方案

Figure 3. The coordinate system for robot
图3. 机器人的坐标系统
 :几何中心o到回转中心c的距离。
:几何中心o到回转中心c的距离。
3. 基于模糊神经网络的控制系统设计
考虑到管道机器人的任务需要和环境复杂多变,为保证在不同的外部条件和内在参数的变化下,控制器的稳定性和鲁棒性,在控制系统设计时采用模糊神经网络与常规的PID控制相结合的多模态控制方法,保证其实现准确的控制。
3.1. Takagi-Sugeno模型
Takagi-Sugeno模型是一类典型的动态非线性模型,由于其结论部分各输出分量由线性方程构成,因此便于辨识结论参数,具有计算简单、易于和PID控制方法相结合等优点[4 ,5]。
第j条Takagi-Sugeno模型的模糊规则为:

其中, 代表第j条模糊规则,r为模糊规则的数目;
代表第j条模糊规则,r为模糊规则的数目; 为模糊系统的第n个输入变量;
为模糊系统的第n个输入变量; 为变量
为变量 的第j个模糊子集;
的第j个模糊子集; 为第j条规则
为第j条规则 的输出;
的输出; 为结论部分的待定参数。相应的隶属度函数用
为结论部分的待定参数。相应的隶属度函数用 表示,则每条规则的适用度为:
表示,则每条规则的适用度为:

应用单点模糊化、乘积推理和中心加权反模糊化推理方法,可得全局模糊系统模型:
3.2. 模糊神经网络的训练结构
ANFIS网络结构是一种Takagi-Sugeno模型的模糊推理系统,在无法直接获取专家知识的场合,ANFIS 能根据样本数据自动提取模糊规则,并依据神经网络的自学习性,调整优化前提参数和结论参数,提高模糊系统的推理性[6] 。
ANFIS结构如图4所示,该系统是一个5层前馈神经网络,由前件网络和后件网络两部分组成。模糊化层、规则层、归一化层为前件网络,后件网络由r个结构相同的并列子网络组成,每个网络产生1个输出量。本文采用的网络输入节点数为3 ( 为输入力矩和
为输入力矩和 为管道模型,
为管道模型, 为传感器数据),对应每个输入的规则节点数为5,输出节点数为1。
为传感器数据),对应每个输入的规则节点数为5,输出节点数为1。
在T-S模型中,对于复杂的非线性空间进行合理的划分,是进行网络学习的重要前提。本文采用模糊C均值聚类法,根据输入空间样本的密集程度来划分输入空间。模糊C均值聚类的实质是通过自组织迭代寻找一组聚类中心矢量,使样本到聚类中心的加权距离平方和达到最小。建模的基本步骤如下:
1) 给定数据集 。设定
。设定 和
和 ,并初始化
,并初始化 ;
;
2) 当迭代数为 时计算c-均值向量
时计算c-均值向量
3) 更新 ,
,
4) 若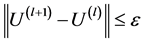 ,则停止算法;否则,令l = l + 1,返回步骤2。
,则停止算法;否则,令l = l + 1,返回步骤2。
3.3. 模糊神经网络的混合学习算法
对于ANFIS的参数训练与确定,采用最小二乘法与梯度下降法相结合的学习算法,其目的是为了减少原始反向传播算法的搜索空间维数,加快网络收敛,提高学习速度。
其过程为:前向阶段,在固定特征参数的条件下,通过隶属函数得到输入变量的函数,将其作用的各个节点的输出并向前计算到归一层,按最小二乘法原则计算系统实际输出与期望输出的误差值,确定结论参数,并将此误差反向传播,按梯度下降法更新前提参数,在预设的迭代次数内使网络的误差值最小;反向过程中,根据实际输出与目标输出计算误差信号,采用梯度法更新隶属函数,从而改善系统的性能。
4. 实验验证
为了验证结构设计的合理性、控制系统各功能模块的可靠性及控制策略的可行性,针对管道清淤机器人的性能进行一系列仿真试验和样机实验。图5为管道机器人的系统仿真模型,图6为管道清淤机器人试样样机,图7为试样样机控制系统界面。
在系统仿真模型中,用于管道机器人的自适应模糊神经网络输入变量为输入力矩,管道模型和传感器数据,每个输入变量有五个模糊子集,其隶属度函数选用高斯函数,初始值均匀覆盖输入变量的整个论域。训练样本通过电机特性曲线和传感器实测数据获得,利用这些样本数据对自适应模糊神经网络进行训练,在训练中初始步长选为0.02,步长递减速率为0.7,递增速率为1.0。一般来讲对ANFIS系统训练次数越多,最终的误差就越小,但所付出的时间代价就越高。经过反复试验确定训练次数为2000次较为合适。图8为输入力矩与传感器数据训练的均方根误差(RMES)学习变化曲线,从图可以看出,经过学习后的模糊推理系统提取了训练数据的局部特征。当训练达到2000次时,RMES已接近零,说明此时系统已经能很好的反应出样本点上输入和输出的对应关系。
将管道机器人相同的150组实验数据输入到传统的PID控制器进行机器人的行为控制,并将结果与基于ANFIS神经网络模糊控制器进行对比,结果如图9所示。从图中可见,ANFIS控制器在不同的环境

Figure 4. The structure of ANFIS
图4. ANFIS 的网络结构

Figure 5. The model for simulation system
图5. 仿真系统模型


Figure 6. The pipeline dredging robot prototype
图6. 管道清淤机器人样机
Figure 7. The interface of control system
图7. 控制系统界面

Figure 8. The training curve of root mean square error
图8. 均方根误差训练曲线
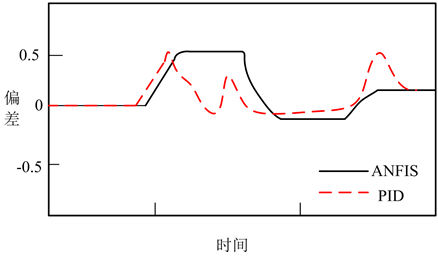
Figure 9. The relative of controller deviation
图9. 控制器偏差的比较
下能产生平滑的控制输入。
5. 结论
1) 基于模块化和参数化的设计思想,研制出管道清淤机器人。该机器人包括机构本体和控制系统两部分。本体包括行走机构、支撑机构、清淤机构、机身4个模块,各模块可整体安装和拆卸,便于机器人的制造、工程应用和推广;
2) 针对不同的工作环境,建立基于几何中心的运动模型和基于回转中心的运动模型,构建机器人的行为控制参数方程;
3) 以模糊控制理论为基础,以管道清淤机器人的工程应用为背景建立了机器人的控制系统;
4) 基于ANFIS的模糊神经网络,对机器人的管道模型、传感器数据及转矩进行训练,得到了机器人的控制模型。与传统的PID控制器相比较,该神经网络模型具有良好的逼近精度、收敛速度快、控制平滑等优点,因此可以进一步应用于管道机器人的其它实时控制。通过实验也验证了模糊控制器的良好工作性能。
本文工作为管道清淤机器人的设计提供了一种新的方案,具有较好的应用价值。
项目基金
江苏省水利厅科技重点项目(No. 2009010)。

NOTES
*第一作者。