1. 引言
冗余驱动并联机器人是在并联机构中采用冗余驱动使驱动关节数大于执行构件自由度数的并联机器人。该类机器人具有优化关节驱动力,改善机构的性能即奇异位形、灵活性、工作空间和避障能力等 [1] [2] ,可提高机器人的力传递能力、精度和刚度,使机器人保持确定的输入力和速度。
冗余驱动并联机器人是一个多输入多输出、非线性、强耦合并且具有不确定性的复杂系统,它的各项性能与其控制方法密切相关,近年来,国内外学者对并联机器人控制方法进行了较为广泛和深入的研究。Yang [3] 提出了一种基于电机和机构动力学模型的计算力矩控制方法,Ting [4] 提出利用3点3轴测量方法提高计算力矩控制方法的精度,但是计算力矩控制忽略了并联机构各关节之间的运动耦合性和各支链之间的同步协调性。Koren [5] 首先由提出了交叉耦合控制,并在传统的串联机床上得到了成功应用。Yeh与Hsu [6] [7] 在应用交叉耦合控制技术提高多轴系统运动的同步性能上取得了显著的进展。Chuang与Chang [8] 采用交叉耦合控制技术来减少3-PRPS并联机器人轨迹跟踪误差。Sun与Mills [9] 将交叉耦合控制技术应用于多机器人系统的协调运动控制,并分析了多运动链运动控制系统的同步问题。Nijmeijer对广义动力学系统的同步控制理论进行了深入的研究,并总结了同步控制理论的基本思想。但是上述方法需要空间轨迹轮廓模型来构建同步误差,从而使得控制算法较复杂。
本文以二自由度冗余驱动并联机器人为研究对象,介绍了其结构特点、动力学参数以及控制理论,基于计算力矩控制方法和同步耦合误差控制理论,提出了非线性同步控制方法,并对该控制方法进行了理论和实验研究。
2. 二自由度冗余驱动并联机器人简介及其控制理论
二自由度冗余驱动并联机器人可以看作是在五杆机构上增加一个分支而成,它的结构简图如图1所示。
3个相同的分支组成该机构,其中L1、L2、L3是驱动杆,而从动杆为L4、L5、L6,各个连杆的长度相等,有Li = 244 mm。中心点D为3个分支的交点,它也是机构的末端执行器的位置。在平面内,

Figure 1. The structure of 2-DOF redundantly actuated parallel robot
图1. 二自由度冗余驱动并联机器人结构简图
该机构有两个自由度,即沿X、Y方向,3个电机分别位于A、B、C三点来驱动该机构。由于关节运动副均为转动副(R),该机器人机构是3-RRR结构型的冗余驱动并联机器人 [10] 。
三个主动关节的转角分别为α、β、γ,主动关节的坐标分别为A (0, 250)、B (433, 0)、C (433, 500),角速度 。表1所示为各个连杆的动力学参数。
。表1所示为各个连杆的动力学参数。
设定某一并联机器人控制系统参数,其末端执行器在任意时刻的输出运动为 ,关节变量为
,关节变量为 ,关节力矩为
,关节力矩为 ,电动机输出的力矩为
,电动机输出的力矩为 ,电动机输入的电流或电压为
,电动机输入的电流或电压为 。实时控制机器人末端执行器的运动状态是并联机器人控制系统要求,就是已知主动关节变量
。实时控制机器人末端执行器的运动状态是并联机器人控制系统要求,就是已知主动关节变量 条件下,各电动机经变速机构获得关节力矩
条件下,各电动机经变速机构获得关节力矩 ,通过控制关节力矩来实现末端执行器的运动状态变化。电动机输出力矩
,通过控制关节力矩来实现末端执行器的运动状态变化。电动机输出力矩 是在电流或电压
是在电流或电压 所提供的动力作用下由计算机的控制产生。因此,并联机器人系统的控制就是对下式的控制:
所提供的动力作用下由计算机的控制产生。因此,并联机器人系统的控制就是对下式的控制:
 (1)
(1)
并联机器人动力学通式如下:
 (2)
(2)
式中, 表示关节驱动力或力矩向量,
表示关节驱动力或力矩向量, 是惯性矩阵,
是惯性矩阵, 为哥氏力和离心力的向量,
为哥氏力和离心力的向量, 表示粘性摩擦系数矩阵,
表示粘性摩擦系数矩阵, 为重力项的向量。由动力学通式可知:并联机器人是一种具有非线性、强耦合性和时变性等特征的系统,针对这些特性,提出其控制的基本原则:第一,把复杂的总体控制问题简化为多个低阶子系统的控制问题;第二,通常并联机器人的控制技术由单关节控制技术和多关节控制技术两部分组成,其中单关节控制技术需考虑误差补偿问题,而多关节控制技术需考虑耦合作用的补偿问题。
为重力项的向量。由动力学通式可知:并联机器人是一种具有非线性、强耦合性和时变性等特征的系统,针对这些特性,提出其控制的基本原则:第一,把复杂的总体控制问题简化为多个低阶子系统的控制问题;第二,通常并联机器人的控制技术由单关节控制技术和多关节控制技术两部分组成,其中单关节控制技术需考虑误差补偿问题,而多关节控制技术需考虑耦合作用的补偿问题。
3. 动态控制方法研究
3.1. 控制方法概述
目前冗余并联机器人有两大类控制方法:关节空间控制和动力学控制,由于关节空间的控制量是通过空间几何关系得到的,并联机构的非线性动力学特性没有充分考虑,不适用于高速、高精度运动情况。

Table 1. The dynamics parameters of 2-DOF redundantly actuated parallel robot
表1. 二自由度冗余驱动并联机器人动力学参数
动力学控制就是将各个关节运动及末端执行器运动以良好的动态品质进行轨迹跟踪或将它们稳定在指定的位姿上。故动态控制方法具有良好的动态响应和稳定性,并具有较高的轨迹跟踪和定位精度。动力学控制的基本框图如图2所示。
3.2. 计算力矩控制方法
计算力矩控制是在已建立的机器人动力学模型基础上,采用非线性补偿对具有复杂的非线性强耦合系统的并联机器人进行了全局性解耦和线性化,使得每一关节均可采用相当成熟的线性控制策略。该控制方法是一种能够确保全局指数稳定或全局渐近稳定的轨迹跟踪的控制方法。
3.2.1. 控制器算法设计
为了简化冗余驱动并联机器人为容易控制的线性定常系统,将一个非线性补偿环节引入该机构内控制回路系统中,机器人各个关节依据线性定常系统理论同步闭环控制。
首先,引入控制量:
 (3)
(3)
此时并联机器人的方程可化为:
 (4)
(4)
式中 为加速度矢量。消去非线性项,以及
为加速度矢量。消去非线性项,以及 是可逆的,可将式(4)化为下式:
是可逆的,可将式(4)化为下式:
 (5)
(5)
式(5)为线性定常系统。
在该线性系统中,可以根据并联机器人的运动规划确定相应的参考信号和反馈增益。参考信号定义如下:
 (6)
(6)
式中, 、
、 和
和 分别表示期望角加速度矢量,角速度矢量和角度矢量,
分别表示期望角加速度矢量,角速度矢量和角度矢量, 、
、 是反馈增益,且为正定矩阵,
是反馈增益,且为正定矩阵, 。
。
闭环系统方程为:
 (7)
(7)
计算力矩控制框图如图3所示。

Figure 2. Basic diagram of dynamic control
图2. 动力学控制基本框图
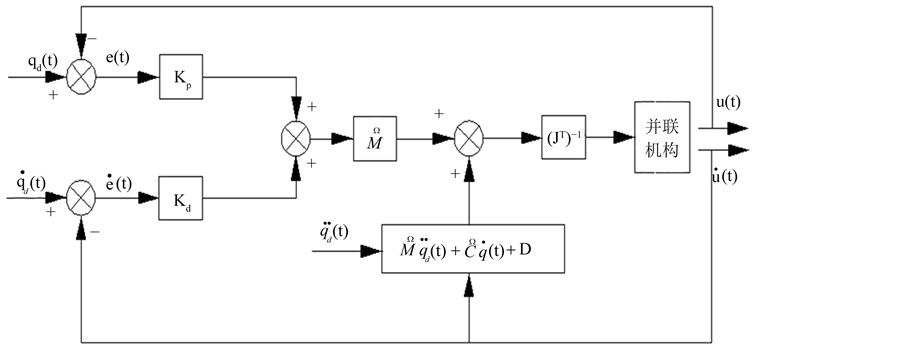
Figure 3. Computing torque control block diagram
图3. 计算力矩控制框图
3.2.2. 仿真分析
根据并联机器人计算力矩控制框图,运用MATLAB/Simulink和MATLAB/S-Function软件模块建立仿真模型。
仿真中,并联机器人的动力学参数如表1所示,反馈增益取为:

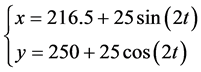
选择末端执行器做圆周运动作为轨迹跟踪形式,运动轨迹方程为:
如图4~8所示,在计算力矩控制下,仿真得到三个主动关节跟踪误差和末端执行器跟踪误差曲线。
由上述仿真结果可知:在计算力矩控制作用下,关节1的跟踪误差为0.0079度,关节2的跟踪误差为0.0069度,关节3的跟踪误差为0.0091度,末端执行器沿X方向误差为0.0081 mm,沿Y轴跟踪误差为0.0097 mm。由不同的时刻各主动关节误差不一致,说明并联机器人在运动中各主动关节存在运动不协调同步现象。
3.3. 非线性同步控制方法
计算力矩控制方法忽略了并联机器人具有多个运动链且各关节之间存在耦合性,因而疏忽了该系统各个支链之间的协调运动,进而引起并联机器人执行机构受力不平衡,造成执行机构过度磨损,严重时导致机构遭到损坏。为了弥补这种方法的不足,将耦合控制技术和普通机器人控制技术相结合,提出一种可以使并联机器人各主动关节同步协调运动的控制方法——非线性同步控制。
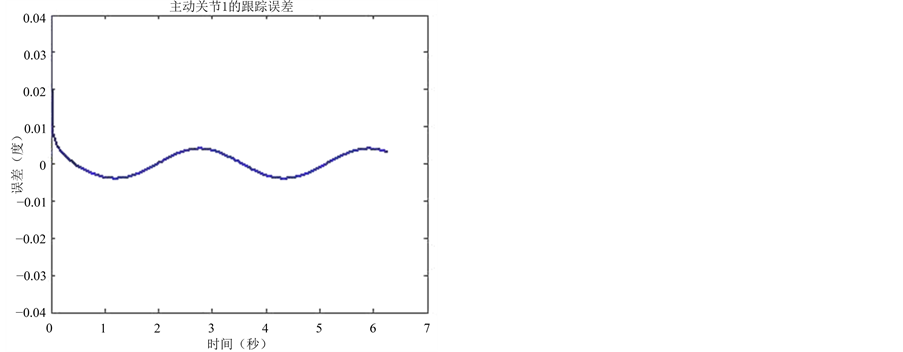
Figure 4. The tracking error of active joint 1
图4. 主动关节1的跟踪误差

Figure 5. The tracking error of active joint 2
图5. 主动关节2的跟踪误差

Figure 6. The tracking error of active joint 3
图6. 主动关节3的跟踪误差

Figure 7. The tracking error of the end actuator in Y axis
图7. 沿Y轴的末端执行器跟踪误差

Figure 8. The tracking error of the end actuator in X axis
图8. 沿X轴的末端执行器跟踪误差
并联机器人的控制中引入该同步控制方法,为了定义并联机器人的同步行为引入同步误差、耦合误差和跟踪误差,即使负载变动很大,仍可以获得比较好的同步性能,并能提高跟踪精度,改善系统的动态性能。
3.3.1. 控制器算法设计
在冗余驱动并联机器人的相关控制策略中采用非线性饱和函数可以使该系统得到良好的控制品质,引入非线性饱和函数 如下:
如下:
 (8)
(8)
其中: 为标准符号函数,设计参数
为标准符号函数,设计参数 。
。
对(8)式求积分,获得如下函数:
 (9)
(9)
 为各个关节的期望轨迹,
为各个关节的期望轨迹, 为实际轨迹,
为实际轨迹, 为期望角速度,主动关节跟踪误差为
为期望角速度,主动关节跟踪误差为 ,于是有:
,于是有:

由于冗余驱动并联机器人中各个主动关节的同步误差不仅仅只包括该主动关节的数据而且还包括与之邻近的其它关节数据。基于同步控制思想,不仅需要 ,而且还需要对机器人系统的运动关系不断进行调整,使得各主动关节跟踪误差:
,而且还需要对机器人系统的运动关系不断进行调整,使得各主动关节跟踪误差: ,引入饱和函数,定义同步误差
,引入饱和函数,定义同步误差 如下:
如下:
 (10)
(10)
若使 ,则
,则 ,式(10)可表示为矩阵形式:
,式(10)可表示为矩阵形式:
 (11)
(11)
简化形式为:
 (12)
(12)
其中: ,
, ,同步转换矩阵为K,且
,同步转换矩阵为K,且 ,易知K为一正定矩阵。利用交叉耦合控制技术,定义一个耦合误差
,易知K为一正定矩阵。利用交叉耦合控制技术,定义一个耦合误差 ,使其包含同步误差
,使其包含同步误差 和跟踪误差
和跟踪误差 ,并使
,并使 和
和 都同时为零,耦合误差定义:
都同时为零,耦合误差定义:
 (13)
(13)
其中 为耦合参数,恒为正值。由式(12)和式(13)可得:
为耦合参数,恒为正值。由式(12)和式(13)可得:
 (14)
(14)
其中: ——单位矩阵;
——单位矩阵;
 ——正定满秩矩阵。
——正定满秩矩阵。
当 时,跟踪误差
时,跟踪误差 ,同步误差
,同步误差 。
。
利用跟踪误差 、同步误差
、同步误差 ,耦合误差
,耦合误差 及非线性函数,机器人的非线性同步控制律可设计如下:
及非线性函数,机器人的非线性同步控制律可设计如下:
 (15)
(15)
其中: 、
、 分别为恒为正的比例增益和微分增益,
分别为恒为正的比例增益和微分增益, 为主动关节的控制输入。
为主动关节的控制输入。
该并联机器人动力学方程如下:
 (16)
(16)
依据Lyapunov稳定性理论 [11] 可知,系统在该同步控制方法下渐进稳定,即:当 ,
, 。
。
非线性同步控制框图如图9所示。
3.3.2. 仿真分析
在末端执行器的轨迹跟踪过程中,设定其运动轨迹为圆,其方程为:

以下动力学参数的取值如下:
耦合误差参数矩阵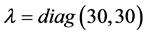
反馈增益取值为:

如图10~14所示,分别给出在非线性同步控制的作用下三个主动关节跟踪误差和末端执行器跟踪误差曲线。
由图10~14可知,主动关节1跟踪误差是0.0069度,主动关节2的跟踪误差为0.0058度,主动关节3的跟踪误差为0.006度,末端执行器X轴的跟踪误差为0.0072 mm,沿Y轴的跟踪误差为0.0083 mm。由于引入了非线性饱和函数到非线性同步控制中,使得各主动关节的跟踪误差最大为0.007度,末端执行器的跟踪误差最大为0.0083毫米,且系统的同步误差能较快的收敛到零,证明非线性同步控制方法的跟踪精度、控制精度较高,该系统在运动过程中获得了优良的同步控制性能。所以,该非线性同步控制方法可以提高该并联机器人系统的控制精度及跟踪精度。
4. 控制系统设计
由于并联机构具有低惯性、高精度、实时性好特点,控制系统设计时需充分考虑响应速度和运动精度的要求。
4.1. 硬件系统设计
二自由度并联机器人GPM系列的控制系统一般由电机、电控箱、上位机、运动控制器和相关软件等软硬件组成。本实验系统伺服驱动器采用松下MINASA系列,PC机采用联想系列,CPU型号是Intel(R) Core(TM)2 Quad Q9400,内存容量为3GB,主频为2.66GHz;采用固高科技公司生产的GT-400-SV-PCI控制卡作为该系统的运动控制器。系统的电机驱动器由该控制器控制,使各轴的运动协调同步,以保证其的运动控制精度。
运动控制原理:在上位机上用户采用高级语言编写好程序后,通过调用该系统中某些函数,将程序输送到系统运动控制卡上。控制卡把命令传递给电机驱动器,完成对电机的控制。经过减速器将电机的运动传递到各个运动轴上,最后完成对机器人末端执行部件的运动轨迹或者运动误差进行控制。各个电机采用绝对编码器记录电机位置,将结果反馈给上机位。并且用户能够随时读取并联机构末端的位置状态。运动控制工作原理如下图15所示。

Figure 9. Nonlinear synchronous control
图9. 非线性同步控制

Figure 10. The tracking error of active joint 1
图10. 主动关节1的跟踪误差
Figure 11. The tracking error of active joint 2
图11. 主动关节2的跟踪误差
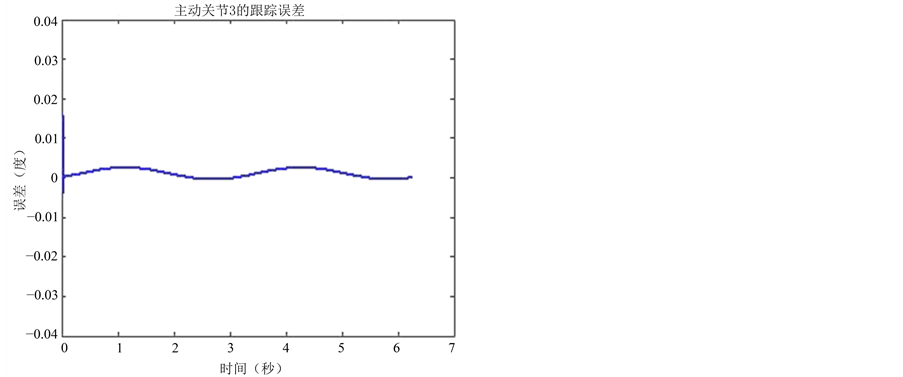
Figure 12. The tracking error of active joint 3
图12. 主动关节3的跟踪误差

Figure 13. The tracking error of the end actuator in X axis
图13. 沿X轴的末端执行器跟踪误差

Figure 14. The tracking error of the end actuator in Y axis
图14. 沿Y轴的末端执行器跟踪误差
4.2. 软件系统设计
系统控制软件是基于GT-400-SV PCI运动控制卡所配套的用户接口标准函数库开发的,把编写的控制程序通过该接口与运动控制器进行通讯,从而使控制系统软件与硬件之间建立联系。该系统软件以动态链接库函数为基础,充分利用Visual C++函数和Windows内部API,以Visual C++6.0为软件开发工具对系统进行开发、调试与维护。
控制系统软件具有功能如下:
1) 根据实际工作要求对控制卡和驱动器进行合理操作;
2) 零点标定和回参考零点;
3) 可以运行一些常用几何轨迹,也可以根据用户需求运行自定义的运动轨迹;
4) 有当前状态监测功能,并可以进行安全保护;
5) 有数据记录功能。
4.3. 轨迹规划控制
轨迹规划不仅要考虑机器人的工作空间,还要考虑机器人的奇异位形区域,因为异位形区域工作就会降低机器人各杆件运转的传递性能,还会加快机构各部件的磨损,轨迹规划控制流程图如图16所示。
5. 二自由度冗余驱动并联机器人的控制实验
实验借助固高GMP系列实验平台对并联机器人进行轨迹跟踪控制研究,实验验证非线性同步控制方法的优越性。对不同的轨迹曲线,采用计算力矩控制方法和非线性同步控制策略做了轨迹跟踪控制实验,从而对并联机器人不同轨迹曲线的跟踪效果进行了对比。实验台如图17所示。
轨迹跟踪实验结果与分析
应用VC++软件编写好控制程序,控制程序在上位机上进行运行,程序对控制器进行调试和运行来完成对并联机器人的控制。实验中采用计算力矩控制和非线性同步控制分别对心型曲线和三叶玫瑰曲线进行轨迹跟踪。
选用心型曲线作为末端执行器运动轨迹,分别在计算力矩控制和非线性同步控制作用下得到心型曲线位移跟踪效果图如图18所示,图(a)和图(b)分别表示两种控制方法对应的轨迹跟踪曲线。
机器人末端执行器运动轨迹选用三叶玫瑰曲线,分别在计算力矩控制和非线性同步控制作用下得到的跟踪效果图如图19所示,图(a)和图(b)分别为二者所对应的轨迹跟踪曲线。
由图18和图19可知,采用两种不同的控制方法对并联机器人末端执行器跟踪相同的运动曲线,采用计算力矩控制法,实际轨迹曲线和理想曲线重合度有一定的误差,但是采用非线性同步控制方法,实际轨迹曲线和理想曲线具有较高重合度,明显提高了轨迹跟踪性能。
该控制实验证了非线性同步控制能够明显的提高控制精度和各关节的跟踪精度,使各关节在运动过

Figure 16. Trajectory planning control picture
图16. 轨迹规划控制流程图

Figure 17. The experiment platform of 2-DOF redundantly actuated parallel robot
图17. 二自由度冗余驱动并联机器人实验平台
 (a) 计算力矩控制图 (b) 非线性同步控制
(a) 计算力矩控制图 (b) 非线性同步控制
Figure 18. Trajectory tracking effect picture of heart shape curve
图18. 心型曲线轨迹跟踪效果图
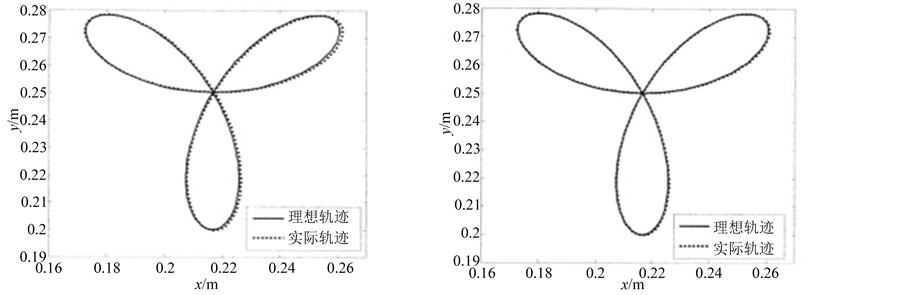 (a) 计算力矩控制图 (b) 非线性同步控制
(a) 计算力矩控制图 (b) 非线性同步控制
Figure 19. Trajectory tracking effect picture of three leafs rose curve
图19. 三叶玫瑰曲线轨迹跟踪效果图
程中出现不协调同步现象的问题得到了明显解决。该方法具有明显的优越性,对进一步研究冗余并联机器人具有指导意义。
6. 总结
1) 本文以二自由度冗余驱动并联机器人为研究对象,介绍了其结构特征和耦合性特点并给出该并联机器人的动力学参数,分析了并联机器人的控制理论并提出其控制原则。
2) 结合现有控制方法的不足之处,并基于同步耦合误差控制理论提出了一种非线性同步控制,仿真结果表明非线性同步控制能够明显的提高控制精度和各关节的跟踪精度,获得了良好的同步性能。
3) 对并联机器人不同轨迹分别采用计算力矩控制方法和非线性同步控制方法进行跟踪控制实验,实验结果验证了非线性同步控制方法的优越性,运动过程中不协调同步的现象明显改善。
基金项目
中央高校基本科研业务费专项资金项目(310825153403, 2014G1251032),陕西省自然科学基础研究计划项目(2015JM5216)。