1. 引言
对处于泥石流地区的河流,其河床极不稳定,河水一年四季浑浊、含沙量较大,致使水文测验断面冲淤变化大,监测设备适用性差、寿命短,如何实现这些河流流量的在线监测是难题,随着水文自动化进程的步伐,目前在线测流系统已经逐步应用在泥石流地区。
目前,国内外流量在线监测的方法和手段主要有:时差法、二线能坡法、底座式ADFM法、水平ADCP法、非接触式雷达波在线测流法等 [1] ,各种监测方法都取得了一些成功案例,但各种不同的监测方法均有其边界条件,不同的监测环境需结合实际选择不同的监测方式;而针对泥石流地区的河流流量在线监测在国内外类似的分析研究尚未有案例。为探索泥石流地区河流的流量在线监测方式方法,本文选择了云南省昆明市东川区汤丹乡洒海村委会大坪子村的小江水文站作为试点研究,以期积累泥石流地区河流流量在线监测的经验。
小江水文站属长江流域金沙江下段一级支流小江干流唯一控制站,集水面积2265 km2,属大河一般控制站,所处的东川小江地区为世界知名的“泥石流博物馆” [2] ,其水文监测断面的测验条件极其恶劣,基本能代表泥石流地区的河流特性。结合该站监测断面的水文特性和实际监测环境条件,经充分论证和研究,确定采用非接触式雷达波RQ30在线测流系统实施小江水文站流量的在线监测 [3] 。
2. 监测方法与原理
系统以水力模型为基础,通过雷达波同时测量水体一个区域的局部表面流速及当前水位,直接输出瞬时流量。
其工作原理如图1所示。
其流量计算体系如图2所示。
该系统采用SIMK (simulation of k)模型计算实时流量值,SIMK模型结合流石流地区的河流水文特性和监测断面特性,利用水动力学模型,以熵的基本概念为基础导出了描述河道横断面上二维流速分布的方程式,通过熵函数、概率密度函数来确定河道断面流速的分布,熵函数的参数k是无因次量,与水流的摩擦因子、谢才系数、曼宁公式中的糙率相关;其校准方式利用水位剖面并综合考虑其他主要影响因素,可较精确的反应任意剖面形状大小河流的流速分布关系。建立模型后,将有限个主要因素如剖面形状、糙率、测量点坐标等输入模型

Figure 1. Schematic diagram of RQ30 on-line flow measurement system of radar wave
图1. 雷达波RQ30在线测流系统工作原理示意图

Figure 2. Flowchart of flow discharge calculation
图2. 流量计算流程图
后,可精准计算出k;根据k将局部表面流速修正为断面平均流速,再乘以断面面积,即得实时流量值。
3. 实施方案
3.1. 系统组成
非接触式雷达波RQ30在线测流系统主要由雷达波RQ30传感器、数据采集仪(RTU)、电源系统、通讯模块、防雷接地设施等部分组成 [4] [5] [6] [7] 。
3.2. 系统功能
1) 能对河流局部表面流速、水位等进行24小时连续在线监测。
2) 能根据实时采集的流速、水位,实时计算断面流量。
3) 能实现数据实时采集、计算、存储、传输的功能。
4) 能将采集的水位、流速、流量通过通信网络传输到中心站。
5) 可人工设定和修改模型参数。
6) 接受中心站管理,通过远程通信与中心站实现双向通信,进行远程诊断、远程设置与维护。
7) 中心站可实现实时数据的分析处理、存储、转录和发布。
8) 可实现WEB、手机APP远程实时数据、工况等查询功能 [4] [5] [6] [7] 。
3.3. 性能特点
1) 24小时全天候自动监测,能够实现低水到高水的不间断跟踪测量,并能及时捕捉洪水信息,为洪水、水量调度提供及时的数据支撑。
2) 系统经设置,最低可达到5 min发送水位、流速、流量等数据,数据样本大,为后期水位、流量分析提供大量的数据支撑。
3) 采用了全新的数字雷达固件,回波质量高,探测性能大大高于其它多普勒点式流速雷达,实现对低流速(0.15 m/s)的监测。
4) 集成雷达水位计,数据稳定,分辨率0.001 m,精度 ± 0.002 m,测量幅度0.5 m~35 m。
5) 水力模型对水位级划分合理精细,每毫米对应一个流速计算“k值”。
6) 可解决突降暴雨后的山区、或是连续降雨后的河流发生高流速洪水的测流问题,也可解决最大流速超过水文部门常规最大流速(5 m/s)的测流问题。
3.4. 传感器安装
小江水文站监测断面河宽32 m,为使雷达波RQ30传感器采集到的数据具有代表性,需将其传感器探头尽量置于河道中泓部分,需设计悬臂长约16 m的支架进行辅助安装。但通常情况下的支架悬臂长仅能达到5~6 m,不能满足小江水文站安装RQ30传感器的需求,需重新设计长悬臂支架。
经研发设计的非接触式雷达波测流探头支架悬臂长为18 m,由基座、悬臂、液压转轴、锁紧螺钉、平衡仓、配重块、雷达波探头底座组成,基座与悬臂通过液压转轴连接,基座与悬臂之间设置锁紧螺钉,悬臂的一端设置雷达波探头底座,另一端设置平衡仓,配重块设置在平衡仓内。在基座与悬臂之间设置液压转轴和锁紧螺钉,只需将锁紧螺钉拧紧就能固定悬臂位置,从而将雷达波探头位置固定,当雷达波探头出现问题需要检修时只需松开锁紧螺钉,通过液压转轴转动就能将雷达波探头移到岸边,方便检修。在悬臂安装雷达波探头的对立侧设置平衡仓,在平衡仓内添加配重块以平衡悬臂的重量,保证较长的悬臂也能平衡,雷达波探头底座可以旋转,雷达波探头底座的旋转能控制探头发射的雷达波角度。测流探头支架上还设置钢绳、支撑杆、拉杆,悬臂上设置支撑杆,支撑杆与安装雷达波探头的一端的悬臂通过钢绳连接,支撑杆与悬臂另一端通过拉杆连接。支撑杆与安装雷达波探头的一端的悬臂通过钢绳连接,以进一步平衡悬臂重量,使得悬臂更加稳定,减小风力对悬臂稳定性的影响,为悬臂顶端搭载的雷达波测流探头提供了一个好的工作环境及提高了测验精度。同时,支撑杆上端设置避雷针,能有效防止雷电对该装置的破坏。其安装方式如图3所示。
4. 应用效果
小江水文站雷达波RQ30在线测流系统建成后,至今已运行两年多,整个系统运行正常稳定;经采用该站缆道流速仪法测验的流量作为基准流量,认为其为真值,在线流量与其对比,计算在线流量监测精度。缆道流速仪法流量测验严格按《水文缆道测验规范》(SL443-2009)执行 [8] 。将相应时间的在线流量数据与人工缆道流速仪法测验的流量数据进行对比,通过计算相对误差、系统误差、标准差和随机不确定度等参数进行精度分析 [9] [10] [11] [12] 。
相对误差按式(1)计算:
(1)
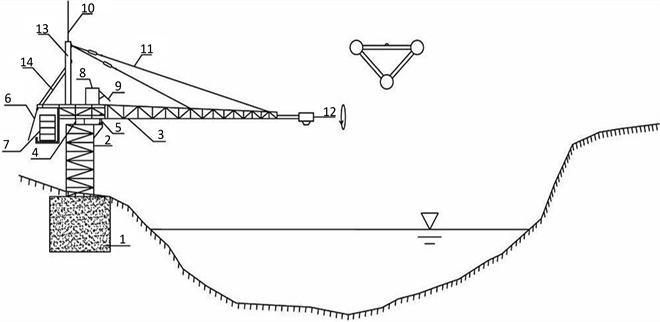 注:1-基建、2-基座、3-悬臂、4-液压转轴、5-锁紧螺钉、6-平衡仓、7-配重块、8-电气箱、9-太阳能、10-避雷针、11-钢绳、12-雷达波探头底座、13-支撑杆、14-拉杆。
注:1-基建、2-基座、3-悬臂、4-液压转轴、5-锁紧螺钉、6-平衡仓、7-配重块、8-电气箱、9-太阳能、10-避雷针、11-钢绳、12-雷达波探头底座、13-支撑杆、14-拉杆。
Figure 3. Schematic diagram of radar wave probe bracket installation
图3. 雷达波测流探头支架安装示意图
式中:
为在线流量相对误差(%);
为在线流量(m3/s);Qi为人工实测流量(m3/s)。
系统误差按式(2)计算:
(2)
式中:ε为在线流量系统误差(%);N为人工实测流量次数;Qzi为在线流量(m3/s);Qi为人工实测流量(m3/s)。
标准差按式(3)计算:
(3)
相对随机不确定度按式(4)计算:
(4)
式中:Se—在线流量标准差(%),
为置信水平为95%的在线流量随机不确定度(%)。
经计算,结果见表1。
经表1统计,在38次有效实测流量中,实测流量在11.0~245 m3/s,包含了高、中、低水位级。通过误差计算,在线流量的相对误差在−16.20%~+21.02%之间,系统误差为0.38%,标准差为10.22%,随机不确定度为20.44%。其中,相对误差在±5%以内的13次,占34.2%;±10%以内的25次,占65.8%;±15%以内的32次,占84.2%;±20%以内的36次,占94.7%。小江水文站属大河一般控制站、三类精度站,根据《水文巡测规范》(SL195-2015)、《河流流量测验规范》(GB50179-2015)之规定,三类精度的巡测站,其比测相关关系定线误差中,系统误差允许在3%以内、随机不确定度允许在17%~19%以内 [13] [14] [15] ;由上统计结果可见,小江水文站雷达波RQ30在线测流系统流量值与同步人工实测流量值的系统误差0.38%在限差3%范围内,其随机不确定度20.44%接近限差19% (主要为监测断面冲淤变化影响),且表1包含了一年内高、中、低水位级不同情况的监测结果,表明该站在线流量监测精度接近巡测站三类精度站要求。由上监测结果分析可见,本文采用的方法合理、监测结果具有一定的准确性。

Table 1. Comparison of online traffic and artificial flow measurement results
表1. 在线流量与人工流量比测分析结果表
5. 结语
1) 本文依据雷达波测速的方法原理,结合泥石流地区小江水文站监测断面复杂的水文监测环境条件实际,采用非接触式雷达波RQ30在线测流系统,基本实现了该站在含沙量大、断面河床不稳定等复杂监测环境下的流量在线监测。经近两年多的运行,系统正常稳定。经比测,系统误差0.38%,标准差10.22%,随机不确定度20.44%;在线流量监测精度接近巡测站三类精度站要求,可为含沙量大、河床不稳定的泥石流地区河流或山区性河流流量在线监测提供参考。
2) 对于河床冲淤变化较大的水文监测断面,探索过水断面河底高程在线监测系统,是该类监测断面提高流量在线监测精度的关键因素之一。
3) 随着流量在线监测技术的发展,针对泥石流地区河流流量在线监测难题,还需进一步研究探索。