1. 引言
光电探测器是光纤通信系统中的核心器件,在军事和国民经济各个领域都有广泛用途。在可见光或近红外波段可以用于探测、工业自动化管控、光电计量等;在红外波段可以用于激光制导、红外热成像、红外遥控等方面。光电系统一般都是围绕光电探测器的性能进行设计的,其带宽决定整个系统的传输速率。目前国内外对光电探测器带宽测试都有深远研究和较为成熟的方案,主要常用的方法有时域法、光波元件分析法和光外差干涉法。
时域法 [1] 对测量信号和参考信号进行同步采集比较,可以直观观察测量波形,但对提供参考信号的标准光源要求苛刻;随着光电探测器带宽增加,标准光源带宽指标难以满足测试要求。光波元件分析法 [2] 是用光波元器件分析仪对光电探测器直接扫描测量。其实质是采用矢量网络分析仪、参考光源及配套光接收机构成,先通过测试标准件比对内部标准数据进行修正,然后用替代法对被测件测试,从而得到被测件响应曲线;这种方法测试速度快、精度高,常用于产线测试,但是测试范围受内置矢量网络分析仪带宽限制且价格较为昂贵。全光纤光外差法 [3] 是目前实验室中光电探测器频响测试的常用测试手段,其克服了以往空间光外差法装置复杂、波段受限、精确度低等缺点,可以得到探测器工作波段的频率响应曲线,但系统受激光器波长稳定性影响较大,且缺乏用于波长微调的反馈系统。
相位偏移伺服系统 [4] 采用相位–频率检测器,在其工作频率范围内将一对产生拍频信号的激光器相位进行锁定,并能对激光器的波长跳变进行修正。本方案通过对全光纤光外差技术进行改进,监控拍频信号跳变信息,有效增加信号的稳定性,降低噪声对测量结果的影响,实现对光电探测器频响指标的准确测试。
2. 总体方案
测试系统主要由主激光器2、从激光器1、信号采集系统、信号监测系统、相位偏移伺服系统等组成,其总体原理示意图如图1所示。主激光器与从激光器干涉产生拍频信号输入探测器信号采集系统,采集系统由被测光电器件PD1与频谱仪ESA1构成,ESA1用于记录不同差频下功率值。信号监测系统由标准光电器件PD2、光谱分析仪OSA、功分器、频谱仪ESA2构成,光信号即可直接由光谱仪监测,又可经光电转换后输入频谱仪ESA2进行监测,确保信号准确可靠。相位伺服系统目的是精确控制和快速调节两个激光器的波长,实现主与从激光器的相位锁定。
系统测量过程如下:激光器1作为从激光器,而激光器2作为波长固定的主激光器。为了监控拍频信号,激光器1,2分别经过1 × 2光学耦合器C1、C2进行分路,其中两路光信号b、c,经耦合器C3
形成拍频信号,在通过被测光电探测器PD1后进入频谱仪ESA1进行数据采集。而主激光器2的另一路信号d,与从激光器1另一路信号a经由2 × 2耦合器C4后,一路送入光谱仪监测,一路经标准探测器PD2、功分器一分为二:一半送入频谱仪ESA2进行监测;一半作为反馈信号送入相位偏移伺服系统。相位偏移伺服系统将拍频信号的频率与相位锁定在一个基准频率上,基准频率可由外部信号源提供,通过与外部参考信号的对比可以对从激光器1的波长进行调控,达到稳频目的 [5] 。
本方案是将拍频信号锁定在参考信号上,既要保证激光器波长稳定性,又要保证外部参考信号的稳定可靠。激光器线宽越窄,激光器带宽越高,越容易被锁定,因此本方案中的激光器采用TOPTICA公司生产的CTL1550,其线宽小于10 kHz。外部参考信号由铷钟提供,其短期稳定性可达到10~12数量级,精确度为5 × 10−11。频谱仪与光谱仪分别采用Keysight公司的E4447A与YOKOGAWA公司的AQ6370C。系统中所有光纤采用保偏光纤,以保证传输过程中偏振态稳定。
3. 相位伺服器系统设计
相位偏移伺服系统由分频器、斜波发生器、相频检测器、电荷泵、环路滤波器、压控振荡器等构成。其构成原理图如图2所示。
如图2所示,拍频信号经分频器进行1/N分频后,与参考信号进入相位偏移伺服系统(OLPS)的核心部件——相位–频率检测器(PFD)。参考信号可以由内部电压控制振荡器(VCO)或者外部铷钟输入获得。相频检测器会将分频后的拍频信号的相位、频率和参考信号进行比较:当拍频信号与参考信号之间没有相位滑移时,PFD将输出一个用于锁相的误差信号,误差信号与被比较的两信号的相位差成正比例;当拍频信号与参考信号之间存在相位滑移时,PFD作为频率比较器,在相位偏移伺服系统中起到辅助锁定的功能。PFD的信号输出被供给到电荷泵,然后送到环路滤波器,环路滤波器具有可调节的比例/积分/微分反馈(PID)单元和附加的高频滚降频率ωHF通过调整Kp、Ki和Kd三个参数的设定使系统更加稳定可靠。
相位偏移伺服系统(OLPS)将输入拍频信号的频率锁定在一个或多个参考频率上,输入的拍频信号在与参考频率比较之前,被分频器进行分频,因此频率锁定公式即为:offset = N × Refrence Frequency。通过调整参考频率或N,可以精确调整两个激光器的频率差。
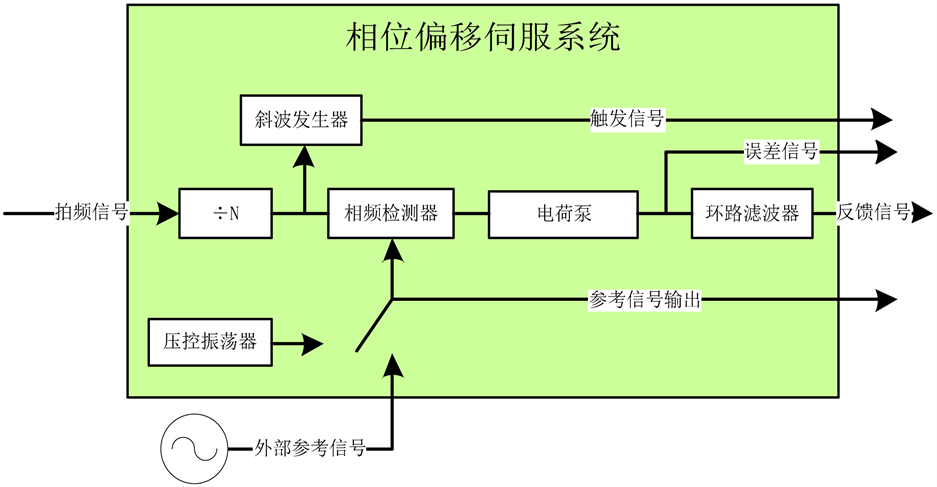
Figure 2. Phase offset servo system
图2. 相位偏移伺服系统构成图
相位偏移伺服系统核心工作是对拍频信号进行相位锁定,其具体实现过程分两步:
第一步,是在期望的偏移频率处获得具有陡峭斜率的误差信号,来进行基本的信号锁定。将斜坡发生器信号连接到采样示波器的触发输入口,PFD输出的误差信号经电荷泵(CP)后连接到示波器信号输入。设置分频器参数N与电压控制振荡器的工作频率为适当值,通过调整从激光器1的功率和波长,将在采样示波器上观察到误差信号。如图3所示。
误差信号的反射中心点即是两个激光器频率相同的地方。因为偏移频率的误差信号是偶函数,所以必然存在点满足Δf = 0,Δf = 0两侧的陡斜率点可用做信号锁定。将此两点的斜率作为特征信号,且斜率点可通过改变VCO频率来改变。选择其中一个锁定点移动到示波器中心位置,降低斜坡发生器幅度,环路滤波器介入将特征点锁定。
第二步,对锁定值进行优化。首先对信号优化,观察示波器中的误差信号,降低增益以减小信号中的RMS噪声,此时可以在拍频信号监测频谱仪ESA2上观察到拍频信号底噪变化。然后对反馈优化,从滚降频率ωHF开始,设置ωI为16 kHz,ωD为64 kHz,通过综合调整比例、积分、微分数值,来获得最佳锁定状态。此时将频谱仪扫描宽度设置为10 MHz,可以看到如图4中的拍频信号。
4. 拍频信号稳定性测量验证
图5中显示频谱仪ESA1相位锁定前与后的对比图,通过“最大保持”功能,我们可以清楚的看到拍频信号漂移带差异。在10分钟数据测试采集后,未锁定状态的信号漂移带大约为55 MHz,而同周期经锁定的信号漂移小于100 kHz。
5. 结束语
本方案对全光纤光外差法进行改进,主要误差来源有:主从激光器频率稳定性、主从激光器功率稳定性、参考信号频率准确性,以及示波器捕获的误差信号的准确性等。方案中基于相位偏移伺服系统对拍频信号相位进行锁定,可显著减少相位偏移噪声在测试过程中对拍频信号质量的影响;与未经相位锁
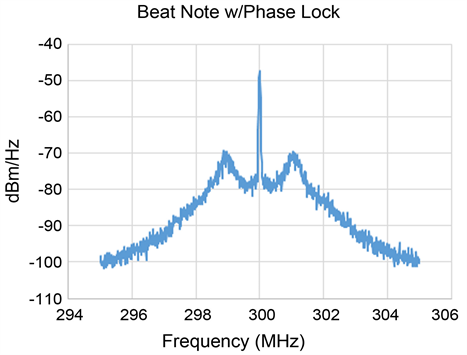
Figure 4. Beat frequency signal after phase-locked optimization
图4. 经锁相优化后的拍频信号
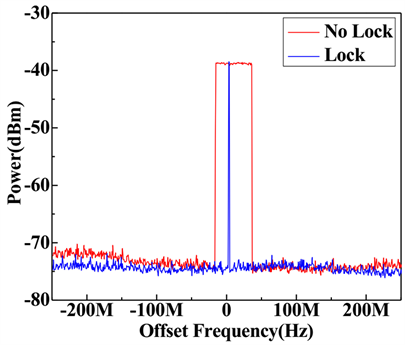
Figure 5. Signal locked before and after
图5. 锁定前后信号差异对比
定信号比较,信号偏移带明显减小,可以提高光电探测器频响测试的准确性与可靠性,满足当前光电探测器频响测试需求,为光电探测器频响指标测试提供更加便捷、廉价、可靠的测试手段;并且也可为后期光通信系统中相位等参数的校准提供有效测试方法。