1. 引言
目前,通风管道内降噪一般是采用在内壁面铺设阻性材料的方法来实现,但对低频段的噪声吸声效果并不理想。降低通风管路噪声的最主要途径是采用阻抗复合式消声结构 [1] ,它是由扩张室、共振腔等抗式结构与多孔吸声材料组合而成,能实现较宽频带内噪声控制。此结构结合了阻性吸声和抗性消声的原理,但由于低频噪声的波长较长,使得此种结构对低频噪声的控制效果很差。近年来,LMFA实验室Galland等人发展了通风管道主被动复合吸声理论 [2] ,建立了一套被称为“Matisse”的通风管道复合吸声测试系统,以多孔吸声材料作为被动吸声层,实现了2500 Hz以下宽频范围显著的消声效果。在主动控制策略方面,采用设计自适应滤波器的方法,来对管道噪声信号进行减噪。自适应滤波就是利用前一时刻已获得的滤波器参数等结果,自动地调节现时刻的滤波器参数,以适应信号和噪声未知或随机变化的情况,实现最优滤波,达到宽频带降噪的效果。
本文基于声波相干涉的原理,采用仿真软件Matlab对有限长管道低中频率噪声进行声学优化,求解出特定频率下的不同控制策略的最优声学值。并同时搭建有限长通风管道的自适应噪声控制平台,讨论了在相同管道边界条件下,声阻抗值随不同主动控制策略的变化规律,总结出主动控制策略对管道声学阻抗的影响规律。相比于声学软件的仿真方法,采用通风管道主动控制平台的实验能够更方便的测得壁面各点的声学频率,所得数值解与理论值基本一致,进一步验证声学仿真所得出的规律;同时可以计算出特定频率下壁面的传递损失,且能够适应多种不同的截面形状及边界条件,更适用于工程实际。
本文研究的主要内容包括:硬件方面,次级通道中的共振吸声结构的设计,以及前馈控制系统平台的搭建;软件方面,自适应滤波器系数的确定,自适应控制算法的仿真实验,DSP中信号采集模块和控制器进行信号处理的过程。
2. 前馈管道噪声控制模型
运用主动噪声控制技术进行管道消噪时,可以将整个的消噪环境看成是一个主动噪声控制系统,根据不同的噪声分布有不同的系统结构。常见的主动噪声控制(Active Noise Control, ANC)系统结构是前馈ANC、反馈ANC及多通道的ANC。由于多通道系统的稳定性要求较高,某一通道的降噪效果会影响到整个系统的降噪效果,本文重点研究单通道系统的情况;前馈ANC系统相比反馈ANC系统从结构上要多布置一个参考信号采集模块,它的好处是避免用于维持控制系统的持续稳定所要求的控制增益过高而导致的系统不稳定;前馈ANC系统通过增加参考信号的输入,与误差信号的输入构成合适的系统参数调节,可以使得噪声的残余幅值降得更低。
前馈主动噪声控制系统物理模型最早由德国人P. Lueg [3] 以专利的形式提出。它的主要原理是先用传感器采集原噪声信号x(n),并把x(n)进行滤波、A/D转换,再送入主动控制器;经过处理后,输出迭代信号y(n),y(n)经过D/A转换,重构滤波,功率放大后,由传声设备输出与原噪声叠加;叠加后的残余误差信号e(n)起的作用是调节主动控制器的滤波器参数,从而调整y(n)的输出,使系统趋于稳定。前馈ANC系统实验原理图如图1所示。
2.1. 阻抗复合式消声结构
管道的消声效果一般由传递损失来衡量,当管道的传递损失达到最大时,这时壁面的阻抗称为最优阻抗。合理的选择微穿孔板的规格,以及布置微穿孔板后的次级声源,有利于次级通道更好的吸声。图2中(a)为微穿孔板的实物,微穿孔板具有吸声系数高,吸收频带宽,压力损失小,气流再生噪声低等优点;因此成为降噪材料的首选。图2中(b)为主被动吸声结构实物,通过采集微穿板后的误差传感器的信号,对其进行控制,进而控制微穿孔板后背声压趋于0,解决被动吸声在低频段吸声效果差的问题。
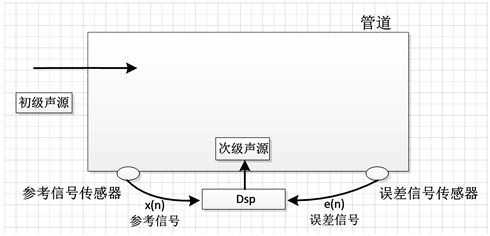
Figure 1. The system model of feed-forward ANC
图1. 前馈ANC系统模型
 (a)
(a)  (b)
(b)
Figure 2. The structure diagram of micro-perforated plate sound absorption
图2. 微穿孔板吸声结构图
2.2. 主动控制策略
自适应滤波器由分立的两部分组成:数字滤波器执行所需的滤波功能以及自适应算法以更新滤波器的系数或权重。典型的自适应滤波器框图如图3所示。
主动控制系统的核心部分是控制算法,控制算法的选择是否恰当直接关系到最终的控制效果。目前存在多种控制方法,其中基于自适应滤波的主动控制是常用的方法。自适应滤波控制算法主要包括Fxlms (filtered-x least mean square)算法,递推最小二乘法(RLS)和快速横向滤波算法(FTF)等;以Fxlms算法为例,为了保证LMS算法的收敛,引入1个模拟次级通道的模型对参考输入信号x(n)进行滤波,把滤波后的参考信号x'(n)与误差信号e(n)的乘积作为误差梯度的估计值,所获得经修正的LMS算法就称为FxLMS算法 [4] 。
其中x(n)为采集的噪声信号,y(n)为输入信号x(n)通过滤波器后输出的迭代信号,e(n)为x(n)与y(n)的差值。自适应算法通过最小化e(n)的平方值来调整滤波器的系数,因此,自适应权重基于逐点更新以逐步减小误差。
(1)
上式就是FXLMS算法,或称为随机梯度算法。该算法特点在于简单,不需要平方、求平均或差分。FXLMS算法的主要步骤 [5] 如下:
1) 确定L、
和
,其中L为滤波器的长度,
为步长,
为时间n = 0时的滤波器的初始化值;
2) 计算自适应滤波器的输出y(n);
(2)
3) 计算误差信号e(n);
(3)
4) 通过FXLMS算法更新自适应滤波器的权重;
(4)
自适应滤波的最终目的是要寻求最佳权矢量
。由Hoff等人提出的X-滤波最小均方误差算法(FXLMS),正是求最佳权矢量的一种简单和有效的递推方法。FXLMS算法的程序流程框图如图4所示。
自适应滤波器系数h的获取也可以采用编程的方法,如自适应滤波器使用的函数adaptfilt,此函数的语法如下:
h = adaptfilt.algorithm (input 1, input 2, ∙∙∙∙∙∙) (5)

Figure 3. The block diagram of adaptive filtering algorithm
图3. 自适应滤波算法框图

Figure 4. The flow diagram of FXLMS algorithm program
图4. FXLMS算法程序流程框图
其具体算法由algorithm所定义的字符串决定,该函数返回值为自适应滤波器的系数h。FXLMS算法的形式如下:
h = dsp.FilteredXLMSFilter (l, 'StepSize', mu, 'LeakageFactor', ∙∙∙∙∙∙ 1, 'SecondaryPathCoefficients', b) (6)
其中主要的参数包括:参数l指的是滤波器长度L,参数stepsize指步长
,为非负数(默认值为0.1),其他的参数一般为默认值不做修改。
3. 前馈系统最优控制策略
管道的壁面阻抗对低频段的噪声吸声效果并不理想,故采用主动控制策略来对其进行控制。管道的消声效果一般用传递损失或者插入损失来衡量,由于本文主要以数值仿真计算为主,采用自适应滤波算法来控制带噪的单频信号,故使用带噪信号某一段频率的幅值减少来衡量。当管道的某一低频段信号幅值降低达到最大的时候,这时的壁面阻抗称之为最优阻抗。
3.1. 主动控制策略仿真
实验仿真采集的一段音频文件信号,选取其中的一个声道进行分析。利用MATLAB将采集的原始信号、降噪信号进行仿真,并运用FXLMS算法计算出迭代信号和误差信号。如图5所示,可以看出当迭代次数达到710时,误差信号趋近0。该算法在实验仿真时具备较高的收敛速率和很好的鲁棒性,满足实验的设计要求,并且误差控制在计算允许范围之内。
本实验选取一段音频信号作为例子,该信号称为原始噪声信号。利用MATLAB将原始噪声信号仿真,并通过FXLMS与RLS自适应滤波算法分别计算出迭代信号和误差信号,以及其对应的频域图。采样的原始噪声信号如图6所示。两种自适应算法得到的降噪效果如图7所示,图(a)所示为FXLMS算法作用的降噪效果,图(b)所示为RLS算法作用的降噪效果;可以看出在0.1秒内,两种算法的误差信号都幅值趋近于0;但仔细查看频域图形,发现RLS算法在2500 HZ频域具有更好的降噪效果。
从性能上可以看出,RLS算法的收敛速度和FXLMS算法相差不多。而RLS算法具备估计精度高和稳定性好的特点(指的是误差范围小)。但是RLS算法的复杂度高,计算量大。
3.2. 前馈控制系统设计
前馈主被动控制系统如图8所示。本系统包括通风管道,还包括设在通风管道内壁面上由入口端向出口端方向顺序依次排列的初级声源、初级噪声采集单元、柔性微穿孔板和出口噪声采集单元;所述通风管道靠近出口端的一段管壁由柔性微穿孔板替换,柔性微穿孔板与通风管道无缝隙密闭连接,所述
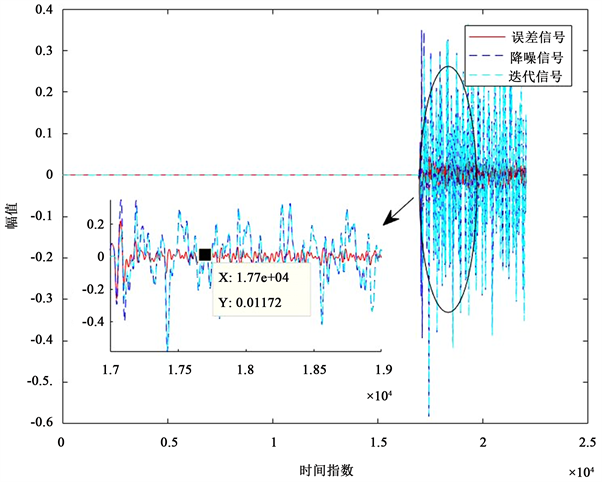
Figure 5. Adaptive filtering of FXLMS algorithm
图5. FXLMS算法的自适应滤波
 (a)
(a) (b)
(b)
Figure 7. The noise reduction effect of two adaptive algorithms
图7. 两种自适应算法的降噪效果
初级声源靠近通风管道的入口端,出口噪声采集单元靠近通风管道的出口端,所述柔性微穿孔板的正下方密闭固定有次级声源,柔性微穿孔板与次级声源之间设有次级噪声采集单元,次级声源靠接数字信号处理器DSP,数字信号处理器DSP与初级噪声采集单元、次级噪声采集单元和次级声源电连接。这种系统能减小噪声对管道系统的影响。
为了对本文提出的次级通道在线辨识技术进行验证,系统采用了TMS320F28335浮点DSP控制器;与以往定点DSP相比,该控制器的精度高、功耗小、性能好、数据及程序存储量大、A/D转换的效率更高。
在设计的有源噪声控制系统中,音频信号的处理芯片使用TLV320AIC23B,它是TI公司生产的一种高性能立体声音频编解码器。该芯片高度集成了模拟电路功能,内置耳机输出放大器,且对输入和输出都具有可编程增益调节。控制系统的软件框图如图9所示。

Figure 8. The system diagram of feed-forward adaptive control
图8. 前馈主被动控制系统图

Figure 9. The software block diagram of control system
图9. 控制系统软件框图
3.3. 前馈控制系统实验
实验系统 [6] 主要由三个部分组成,一部分是利用电脑与功率放大器产生初级噪声信号并放大,经过扬声器后发出初级噪声;另一部分利用DSP控制器驱动扬声器产生次级噪声实现主动控制;最后一个部分则是管道传递损失的测量,在管道的两端处分别布置麦克风,采集管道内声信号。该实验系统实物图如图10所示,实验采用德国MG Microtech Gefell˚M370类型的麦克风,其频率响应范围为20 Hz~20 KHz,精度为10.7 mv/Pa,能够满足实验的需要。与麦克风配套的前端为东方所INV3060s型噪声测试分析仪,将麦克风采集到的信号进行分析处理,并导出数据结果。
本实验采用白噪声和单频正弦波作为初级噪声,在MATLAB中编辑程序产生噪声信号,并通过电脑音频接口输出到功率放大器后,经扬声器后产生初级声源。噪声的时域波形图与频域波形在上文进行了仿真。经计算,微穿孔板的共振频率约为1300 Hz,在此共振频率下,其吸声系数达到最大,理论上管道在此频率下会出现最大降噪量。
在主动吸声实验中,误差传声器M2采集微穿板背后的声信号,经DSP内部运算后,存在缓存器中,当缓存器中的迭代声信号由次级声源发出与原噪声信号抵消后,使得微穿孔板后背声压趋于0附近,来达到主被动复合吸声的效果。选择频率为570 HZ和700 HZ的单频正弦波作为初级声源。如图11所示,图(a)是频率为570 HZ时,两测点分别对应的声压值;同样,图(b)是频率为700 HZ时,两测点分别对应的声压值。
实验结果显示,在570 HZ的初级噪声下,管道入口处的声压级为85.9 dB,经主被动复合吸声结构后,管道出口处的声压级为77.3 dB,降噪量达到8.6 dB;当在700 HZ的初级噪声下,管道入口处的声压级为89.5 dB,经主被动复合吸声结构后,管道出口处的声压级为79.4 dB,降噪量达到10.1 dB;实验结果表明,结合主动控制的降噪方法对单频信号具有较好的抑制效果。
4. 总结
本实验以柔性微穿孔板作为被动吸声层,实现了微穿孔板的共振频率以下宽频范围显著的消声效果。在主动控制策略方面,自适应滤波是噪声信号处理的关键,自适应算法又是自适应滤波的核心;在搭建实验平台之前必须很好的掌握自适应算法。本实验主要运用了Fxlms算法和RLS算法对噪声进行了

Figure 10. Physical drawings of the experimental system
图10. 实验系统实物图
 (a)
(a) (b)
(b)
Figure 11. The sound pressure level at the measuring point under the primary noise
图11. 初级噪声下测点处声压级图
自适应控制。可以得出以下结论:
1) 在基于柔性微穿孔板的被动噪声控制下,加入主动噪声控制的方法,有利于低、中噪声频率的消除,使得整个管道实现宽频带噪声的控制;
2) 在主动控制策略方面,自适应算法的效果与自适应权重(自适应滤波系数)的选取有关,为了得到较好的减噪效果,通常采用编程的方法获取;
3) 通过比较自适应滤波的减噪效果,可以看出基于RLS算法的主被动控制系统具有更好的宽频带消声,但同时计算量也会增大。
基金项目
国家自然科学基金(51405093);广西自然科学基金项目(2015GXNSFBA139232);桂林电子科技大学研究生优秀学位论文培育项目资助(项目编号:16YJPYSS05)。
参考文献