1. 引言
我国西南地区所属贵州省自然生态环境良好,近年来居民经济实现快速增长,自然生态环境也得到不断改善和有效的保护,并给多种多样的鸟类提供了极其优越的适居环境,但大量鸟类的存在给电力线路的正常运行带来了极大的危害。见图1。
目前,部分输电线路主要使用的驱鸟方式有安装防鸟刺、风轮式驱鸟器、电子声音驱鸟器、超声波驱鸟器等,其中,防鸟刺廉价易安装,但是一种被动防御方式,无法做到全线路覆盖;风轮式驱鸟器主要是以风力驱动叶轮旋转,利用反光来驱赶鸟类,其缺点也很明显,在无风的条件下便失去了作用。声音驱鸟效果作用范围也大,但易出现扰民的副效应;超声波驱鸟是通过播放超声波刺激鸟类的神经系统,使其生理紊乱而逃,故没有地域性限制,适合大范围的推广应用,但缺点是成本过高及使用寿命低 [1] 。
本文旨在通过利用多种供电方式下的双重探测方式来驱离鸟类,在增加可靠性的同时,有效降低寿命周期成本。
2. 多普勒检测原理
当一个频率为f0的振荡源和一个接收这一振荡的物体,两者之间有相对向运动时,这个接收体获得的振荡频率将不同于源体频率f0,假设这个频率为另外的值f。当振荡源体与接收体远离时,有f0 > f;当振荡源体与接收体彼此接近时,f0 < f,这就是所谓的多普勒效应。该多普勒检测模块由接收机、发射机和天线三部分组成,天线为接收机和发射机共用。
设发射体发出如图2所示振荡从A到B的一段电磁波,在空间直线长度为D,频率是f0,则波长为:
(1)
式中:
是在自由空间的传播电磁波速度。
在A到B距离长度D中振荡周期数目是:
(2)
该段正弦波从左向右前行时遇到了目标,首先是A点与目标碰撞并被反射回去;然后是B点与目标接触,也被反射回来。如果发射体和目标之间存在相对运动,目标以径向速度
向着发射体飞行,则AB这一段正弦波被接收体反射时,目标与正弦波互相接触的持续时间将是
。在A点接触目标并被反射到B点,此时接触目标也被反射这段接接触时间内,目标向着发射体前进了一段距离,它是
。因此,B点被目标反射到发射体(接收体)所传播的距离,会比A点被目标反射回接收体(发射体)所走的距离要小一点,二者之间的差值就是目标前进的距离
,这一距离所对应电磁波的传播时间是
。接收机所收到的目标反射波仍然是AB这段正弦波,但是接收的持续时
间将不再是
,而是要短一点。这时,f < f0,两者差值为:
(3)
通过上述分析得知,只要目标相对于接收机有相对径向移动速度,接收机收到的频率与发射机的发射频率就会有差值。当鸟类飞行活动进入多普勒组件探测范围内,相对于探测组件有相对径向移动速度
,按式(3)就可得出多普勒组成输出频率fd。在实际使用过程中,为便于测量可采用电子元件将频率差转换为电压电流的输出 [2] 。
3. 装置驱鸟原理
本文所述多普勒超声波驱鸟器通过输出频率在20 kHz以上的超声波脉冲来影响、刺激和干扰鸟类的生理、神经系统来达到驱离飞鸟目的。该多普勒超声波的特点有方向性强、衰减快、难穿透障碍物,可利用大功率超声波的一次又一次的反射进行传播,从而形成一个超声波无形防护网对所涵盖的空间飞鸟进行驱离 [3] 。
本文所研制的超声波驱鸟装置工作时,通过不断变换频率的超声波信号来防止鸟类对某些频率产生适应性,以保证产生的效果持久性、有效性。超声波产生电路由超声波反射器、发射换能器组成,在输入端添加某一适宜频率的方波,经反向器作用后产生两路方波,再将这两路方波信号加入到超声波发射换能器的两端产生超声波 [4] ,通过不断变换输入端方波的频率即会产生一系列变频超声波,对鸟类听觉、神经系统进行有效不间断的干扰和刺激,使其感到恐慌不安无法忍受,表现出食欲不振、逃离等症状,促使该鸟类逃出所要保护范围。
该装置超声波频率在20,000 Hz以上,大大超过人类耳朵的听觉范围,不会对范围内人的生存状态造成伤害。超声波发生器定时启动,当飞鸟来进来时,驱鸟器开始随机以某一频率启动,通过定时改变超声波的频率,直到把鸟赶走为止,系统会记录这个频率为驱鸟最佳频率,然后经过GPRS传送给后台监控中心,以便进一步掌握飞鸟的生存活动规律,采取后续措施 [5] 。如图3。
4. 探测系统设计
本装置采用的探测技术是基于微波多普勒主动探测及红外被动探测两种技术组合,如图4。微波多普勒探测模块的频率为10.525 GHz,探测区域是直径为40米的球形空间,主要是利用发射装置向探测区域发射一定频率的微波信号,自动进行分析计算发射与接收信号的频率偏差,以确定是否启用超声波驱鸟器 [6] 。而红外被动探测器的探测区域约为10~20米范围,其本身不能发射红外线探测信号,但可以接收鸟类飞近时发出的红外线,然后判断是否启用驱鸟装置。
4.1. 多普勒微波传感原理
该多普勒检测模块核心是采用HB100的微波位移传感器,检测范围为10~15 m。检测设备结构布置如图5所示,HB100通过检测监测区域内鸟类的飞行速度信号转换成电信号,进行放大、处理后进行判断,若为真值,则发送指令启用驱赶装置 [7] 。
4.2. 红外探测原理
本装置的被动式红外探测模块使用的是可以以非接触形式把检测到的物体微弱红外线能量转化成电信号,特点是规模小、电路结构较简单、集成程度高、抗干扰性能强、消耗低 [8] (如图6)。
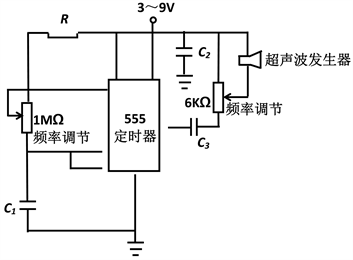
Figure 3. Principle of ultrasonic drive birds
图3. 超声波驱鸟原理图

Figure 6. Infrared detection circuit diagram
图6. 红外探测电路图
5. 供电系统设计
本装置供电系统采用风能、太阳能电池板组合系统给蓄电池进行充电的同时也为其他组件提供所需电能,当白天太阳光照强度充足时太阳能电池板同时给蓄电池充电,供给探测器、发生器、控制器等模块能源;当阴雨天、夜晚时,自动转换成风力供电;若是无风无光时,则用蓄电池所储能量给设备各部分供电,以此保证在设计期限内设备的供电可靠性、稳定性 [9] 。如图7。
整个供电系统由太阳能电池板、风力叶轮电机、控制电路、逆变器、蓄电池组等组成。作为系统核心器件的太阳能电池方阵和风力叶轮电机的作用是将吸收的太阳能或风能转换为电能,以提供给装置各模块电路正常运行所需的动力,与此同时通过控制电路把多余的电能传送到蓄电池组中存储以便无风无光时使用 [3] 。控制器的主要作用是控制供电系统的运行状态,把太阳能及风能提供的电压转换成电路所需要的工频电压,同时进行转换的电压还有太阳能电池板、风能输出电压与蓄电池组充电电压,对蓄电组的可能产生的过充电、放电也同时进行防护。为了减少蓄电池组的经常维护带来的不便,经综合比较,设计采用不需要进行维护的铅酸电池作为供电备用补充 [5] ,当光照或是风力充足时完成对各用电模块的供充电任务。通过上述的设计有效的避免了晚上或阴天下雨时,系统用电组件缺电不能正常工作的缺点,保证整个系统能持续、稳定、可靠地不间断运行。
6. 超声波驱鸟工作过程
6.1. 控制模块
该智能多普勒超声波驱鸟装置的控制模块设计由单片机PIC16C54和基本的电路组成,主要负责根据接收到的信息选择白天和夜晚两种工作模式,接收微波及红外信号,指令执行模块进行驱赶飞鸟等任务。根据驱鸟目的的不同,系统设置了白昼和夜晚两种工作模式 [10] 。
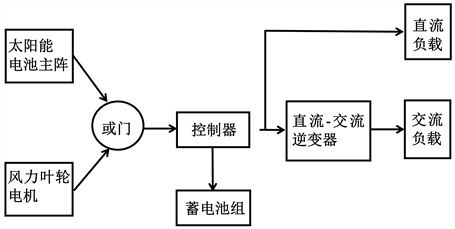
Figure 7. Power supply system diagram
图7. 太阳能风力供电原理图
白天工作模式主要是为了防止鸟类飞行碰撞输电导线及在绝缘子上端停留排泄粪便污染绝缘子引发污闪故障等,此时探测系统会自动选择采用主动探测模式工作。微波多普勒雷达能够主动探测飞临塔杆的鸟类等运动物体,此时PIC16C54在接收到活动信号后,不断产生变频超声波信号,该信号经过放大换能电路处理后向保护区域四周播放进行驱赶飞鸟。夜晚工作模式主要是阻止鸟类在塔杆组件上栖息,根据观察夜间鸟类在塔杆上以静为主基本不活动,探测系统转为采用被动式红外探测模式,此时雷达探测系统关闭,系统转入定时工作状态,以减少能量消耗。每隔2个小时时间,单片机PIC16C54会驱动超声波换能电路向监测区域播放高分贝超声波,同时驱动强闪光模块闪烁强烈刺眼白光,使鸟类无法正常休息,直至无法忍受,离开塔杆。
6.2. 执行模块
多普勒超声波驱鸟装置设计的执行模块中超声波放大电路采用的推挽式功率放大电路,该电路由TIP122和TIP127组成,匹配相应的超声波换能器,可将单片机PIC16C54发出的具有超声波频率的信号,转换成大于120 dB的超声波发射出来,来刺激鸟类神经系统,目的是使得鸟类生理紊乱而逃脱。强闪光模块由驱动电路和大功率白光LED (功率为3 W)组成 [10] 。采用大功率场效应管BUZ91A进行驱动,可通过单片机的高低电平直接控制LED白光的亮与熄,产生的亮度大于300 lm强光可在夜晚间断照亮塔杆附近,恶化鸟类栖息环境,防止筑巢。
6.3. 工作过程
该装置的主要技术参数如表1如示。
通过微波位移感应传感器采集鸟类飞临杆塔监控区域的位移信号,经过放大滤波电路发出启动处理系统指令,初始化硬件系统模块,由软件发出指令选择驱鸟方式,判断检测值是否满足设定值,若为真则激发超声波动作进行驱鸟。设定间隔时间为每15分钟进行下一轮检测,通过不断改变超声波频率直至把鸟驱离,同时把采集到的杆塔杆号、驱鸟频率、时间等信息通过无线传输GRPS模块发送到后台监控中心,以便现场运行人员巡视时特别对此位置进行人工重点观察。如图8。
7. 结论
本文设计的超声波驱鸟器采用了多普勒微波传感和红外探测双重探测方式以及物联网技术,一改传统的物理驱鸟器和简单超声波被动驱鸟装置的弊端,在提高探测精度的同时,灵敏度也有一定的提高,鸟类只要在探测范围之内,不管它动还是不动,都能被探测出来。该装置有如下特点:

Table 1. Main technical parameters
表1. 装置主要技术参数
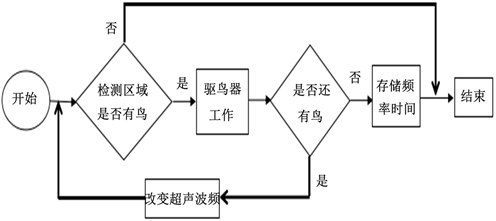
Figure 8. Flow chart of operation of bird drive system
图8. 驱鸟系统工作流程图
① 双探测机制
具有多普勒微波传感技术主动探测鸟类的靠近,若有鸟类靠近,立即启动驱鸟;
具有被动式红外探测技术,若探测到鸟类红外信号,立即启动驱鸟。
② 物联网技术
通过GPRS手机网络,定时上报设备运行状态、鸟类入侵数量统计、超声波工作频率等信息,通过电脑,在监控后台即可以获取设备运行状态。
③ 高智能
装置为了防止鸟类的适应性,不仅利用扫频模式,不断变换频率;而且具有学习功能,收集成功驱赶鸟类的频率,提高驱鸟的效率。
基金项目
贵州电网有限责任公司2018年职工技术创新项目。