摘要: 本文面向人工智能普及教育的迫切需求,以类人机器人教具为载体,开发了机器人控制系统,包括总体方案、整机运算控制器、舵机及控制器、机器人摄像头、语音控制模块、遥控模块和电源模块的选型配置原则和过程。该控制系统应用于类人机器人套件,能够实现机器人运动控制、语音控制等功能,为人工智能普及教育提供了具象化实例。以机器人方位角的跟踪控制验证了本文的控制系统具有良好的实际使用效果。
Abstract:
In order to meet the urgent needs of the popularization of artificial intelligence education, this pa-per develops a control system based on humanoid robot teaching instruments, including the overall scheme, operation controller of the whole robot, servo with controller, robot camera, voice control module, remote control module and power module. The proposed system is applied to humanoid robot firmware, which can realize robot motion and voice control with other functions, which pro-vides a concrete example for the popularization of artificial intelligence education. The tracking control of robot azimuth angle proves that the control system in this paper has good practical ap-plication effect.
1. 引言
十九大报告指出:我国经济已由高速增长阶段转向高质量发展阶段。建设现代化经济体系,要以人工智能融合实体经济培育出的增长点推动先进制造业加快发展 [1]。人工智能的创新普及是我国实现后来居上、迈入制造强国的重大历史机遇 [2]。依据国务院《新一代人工智能发展规划》 [3] 和教育部《义务教育小学科学课程标准》(简称《标准》) [4],人工智能的普及教育要从娃娃抓起。如今世界各国的青少年科学教育都在发生剧烈、深刻的变革。美国的K-12科学教育框架和2014年提出的新一代美国科学教育标准 [5]、英国经过3年修订后于2014年实施的小学国家课程学习纲要 [6]、日本六次修订小学科学课程标准 [7]、新加坡2014年颁布的以“为明天做准备”为目标的小学科学课程大纲,无不面向各自国家和地区的内在教育需求、努力让小学生适应未来的科技社会 [8]。2017年教育部颁布的《义务教育小学科学课程标准》强调,科学探究与交流过程是在真实的问题情境中基于问题解决的学习过程 [9]。而《标准》指出“小学科学课程对培养学生科学素养发挥了重要作用”,但在实践中存在时代性有待增强的问题:课程内容选择缺乏现代科学的宏观视野、活动设计不能充分体现科学实践的基本特征、目标定位与儿童认知特点和发展需求不相适应。将人工智能以科学研究的方式引入小学课堂,将深刻的科学原理以通俗易懂的方式进行科普化体现和科研式实操,是保证小学科学课程的时代性、提高人民对教育满意度的强有力措施 [8]。
以人类自身的形体结构和智力为原型参照的类人机器人是人工智能领域最典型代表 [10]。也是针对小学科学课程来说,容易引发学生兴趣且科技含量较高的教具。本文开发了类人机器人教具的控制系统,使得类人机器人作为通过观察、比对、测量、记录、组装、搜索、体验、思考、研讨、编程、调试、创作等课堂行为完成机器人通识、机器人搭建、机器人感知、机器人学习、机器人控制等课程模块,传播机器人的无线遥感、语音交互、目标识别、路径规划、轨迹跟踪、运动控制等的科学道理与实现方法,进而设计机器人踢足球、跳舞、救援、搬运、竞速、寻迹、答题等项目赛事,有效培养和充分发挥小学生的科技创新潜力,全面实现《标准》和《规划》提出的人工智能普及教育和科普创作目标。
2. 类人机器人教具控制系统设计
2.1. 总体方案配置
本文设计的类人机器人教具采用树莓派微型计算机、舵机控制卡、摄像头、语音识别模块配合麦克风、遥控器、语音识别模块配合喇叭、陀螺仪、加速度计、罗盘传感器、舵机、直流电源等模拟人的大脑、神经系统、眼、耳、口、身体平衡、四肢关节、心脏等感官和器官,实现机器人整机运算控制、机器人肢体运动控制、机器人目标识别、机器人识别外部指令接收、机器人应答外部指令、机器人姿态解算、机器人运动驱动、能源供给等功能,如表1所示。

Table 1. Configuration scheme of control system for humanoid robot as teaching instrument
表1. 类人机器人教具控制系统总体方案配置
2.2. 机器人整机运算控制器配置
由于树莓派是基于先进精简指令集设计的行业主流微型电脑主板 [11],功能强大,可高速处理数据及发送指令,Linux操作系统完美兼容机器人算法控制,体积小巧轻便,适合置于空间有限的教具本体内部,开放40针GPIO直接连接读取传感器输入控制舵机输出,无线可直接与外界电脑互通,64 G SD存储卡可存储大量数据。USB和CSI接口可连接语音识别模块和视觉识别模块。为后续深度开发创造平台。因此本系统主控器选择树莓派Raspberry 3B,4核1.2 GHz 64-bit使用ARM Cortex-A53CPU,内置2.4 g无线和蓝牙4.1,4个USB,40针GPIO,1G RAM,HDMI视频输出,CSI照相机端口,Linux操作系统。
2.3. 舵机控制器配置
舵机控制信号是使用PWM进行的,主控板可使用的PWM控制仅为GPIO_01一个通道,为了控制17路舵机,需要17个PWM控制通道,所以需要外接舵机控制卡使用I2C总线接口控制17路PWN舵机控制。因此本系统舵机控制卡选择2个16通道舵机控制器,可级联32路舵机,舵机控制电压6 V,控制板电压5 V,使用一个I2C总线接口控制16路PWM舵机,PCA9685芯片控制。
2.4. 舵机配置
参考其他小型类人机器人 [12] [13] 的舵机规格,选取6V扭矩2.0 N·m的舵机,尺寸20.0 mm × 40.5 mm × 40.0 mm,适合用作小型仿人机器人的关节,方便尺寸建模,节省空间。传输方式为通用的I2C,控制角度0˚~180˚,传输速率快,接线简便、操作方便。
2.5. 机器人摄像头配置
采用主控器树莓派专用摄像头,支持1080p30摄像,有专用CSI连接卡槽,体积小巧轻便。800万像素,索尼IMX219感光芯片,摄像支持1080p30,720p60,640 × 480P60/P90。
2.6. 机器人内部传感器配置
内部传感器是由MPU6050三轴陀螺仪芯片+HMC5993L三轴加速度芯片 + BMP180三轴磁场芯片组成的GY-87模块。3.3或5V供电,I2C通信。I2C数据通信方式可直接与主控板进行连接,三轴陀螺和加速度芯片可进行机器人自起和平衡控制。GY-87体积小巧,连接方便,可编程性高。适合机器人内部状态识别功能开发。
2.7. 机器人语音控制模块配置
语音控制模块选用WEGASUN-M6核心板驱动麦克风和喇叭实现语音识别和语音输出。驱动板采用TTL串口数据传输,内置语音识别可离线语音识别,5 m识别距离,智能降噪过滤,软件进行语音库调取使用。无需使用云端识别,不需要网络可离线进行机器人语音控制,TTL串口接口可直接连接主控卡进行数据交换。可软件固定编辑语音库,适合机器人语音开发使用。
2.8. 机器人遥控模块配置
因为本系统采用树莓派控制器,而针对树莓派的专用红外控制扩展板,优选树莓派3B扩展板完成各种红外遥控和被遥控功能,进行机器人控制。其中,红外线接收发射功能,工作频率38 KHz,接收距离18~20 m,接收角度+/−45度,波长:940 nm,发射距离:7~8 m,完全满足小型类人机器人教具要求。
2.9. 机器人电源配置
由于电源需要为17路舵机及控制板供电,舵机工作电压范围在4.8~7.2 V之间,控制板5 V,选择电源必须大于7.2 V,舵机最大扭矩工作电流为1~1.8 A,稳定电流100 mA,整体额定电流可控制在3000 mA,控制板额定电流2.5 A,外接传感器额定电流1 A,所以电流需要选择6.5 A以上电源,12 V 7000 mA锂电池电流及电压范围足够,经降压模块可供给控制器和舵机稳定电压及足够的电流,供电时长多于1小时,带电池储存容量显示,可满足电源选型要求。因此机器人电源配置参数为:
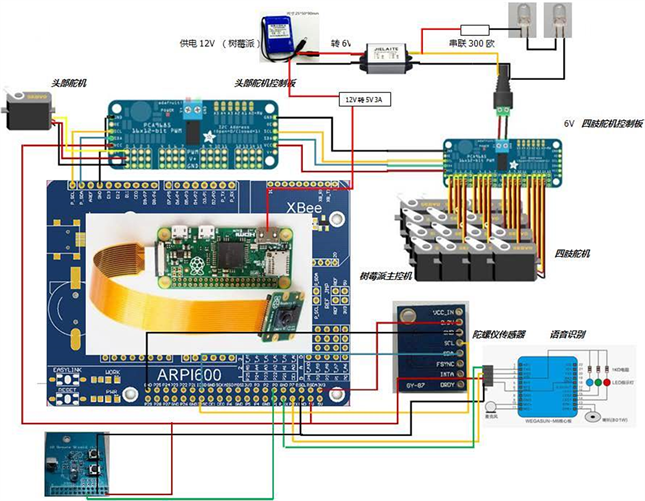
Figure 1. General scheme of robot control system
图1. 机器人控制系统总体方案图
工作电压:DC-DC标称电压11.1 V,充满电电压:12.4 V~12.6 V
容量:4/5/7AH
标准充/放电电流5/8A
机器人电池连接两个降压模块,分别为12 V~5 V 3A降压模块(树莓派、语音识别模块供电)和12 V~6 V 3A降压模块(舵机供电)。
2.10. 机器人控制系统总体方案图
上述控制系统配置和总体方案如图1所示。该系统能够确保机器人教具至少连续运行2小时,能够及时准确感知内部状态、识别外部语音语义指令或遥控指令,完成相应动作行为。
3. 机器人控制系统效果验证
将本文的控制系统加载于RoboSoul H3P人形机器人套件 [14],如图2所示,并验证了语音控制机器人前进、静止、后退等功能,相应源码如图3所示。
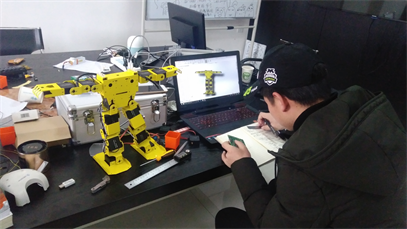
Figure 2. Robot control system verification platform
图2. 机器人控制系统验证平台
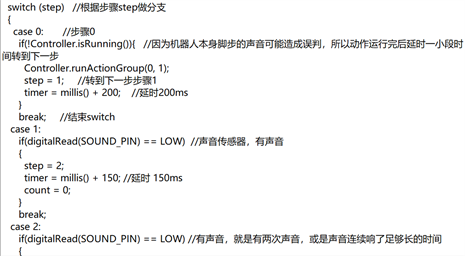
Figure 3. Part of the source code for robot motion and voice control
图3. 机器人运动控制和语音控制部分源码
图4为采用本文的控制系统开发的机器人步行过程方位角控制效果。以机器人初始状态的方位角为参考,通过语音和遥控改变方位角的给定值,通过机器人内部传感器GY-87模块计算得到的实测值能够较好地跟踪给定值。保证机器人具备良好的控制效果。
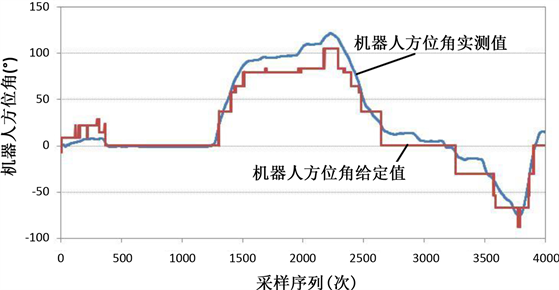
Figure 4. Robot control system verification platform
图4. 机器人控制系统验证平台
4. 结论
教育机器人推广应以教材、课件、配合教具以及教学文件为载体,形成整体解决方案。而其他几项都在一定程度上依赖于教具的具体呈现和功能配置。在基本明确需要通过机器人载体传播哪些人工智能要素的基础上,本文设计开发了类人机器人教具的控制系统。接下来我们将以该系统为基础继续开发的机器人课程模块并嵌入到小学信息技术或科学课程、用于学校机器人小组、机器人创客、人工智能和机器人比赛等,为人工智能的普及教育提供良好的解决方案。
基金项目
辽宁省自然科学基金项目“融合V-SLAM与深度学习的仿人机器人智能行为研究”(2019-ZD-0345)、“仿人机器人视觉环境认知与类脑智能行为研究”(2020-CSLH-41)、沈阳市高层次创新人才项目“仿人机器人若干关键技术研究及应用推广”(RC190324)、沈阳市科技创新平台建设规划市级重点实验室项目:沈阳市仿人机器人重点实验室(18-007-0-10)。