1. 引言
目前,我国及其他一些国家已经出现了无人工厂、无人码头等新型工作场景,极大地提高了生产效率和产品品质,彻底解决了生产中人身安全事故问题。而在建设领域,尽管智慧建造、智慧工地的想法已经出现,但多数只是将现代先进技术与传统施工流程的简单叠加,并没有真正意义上的改变建筑产生方式。
近年来,随着《2016~2020年建筑业信息化发展纲要》、《关于推动智能建造与建筑工业化协同发展的指导意见》、《国务院办公厅关于促进建筑业持续健康发展的意见》等多部政策的出台,可以发现在全面推进生态文明建设、加快推进新型城镇化建设的背景下,智慧建造技术和装配式建筑在国内正在逐渐兴起,政策扶持力度也在不断加大。同时,随着时代的发展,物联网、云计算、大数据等新技术不断发展和与工程建造领域的融合,建筑行业也正经历着深刻的变革。
在2017年的第五届“中国建筑”项目管理论坛上,中国工程院院士、华中科技大学校长丁烈云从科技革命、数字建造、产业变革三个方面阐述了建筑行业的变革。他指出,在云计算、大数据、人工智能、BIM、3D打印等数字技术冲击下,中国亟待由建造大国向建造强国转型升级,由碎片化、粗放型劳动密集生产方式转为集成化、精细化技术密集型生产方式。随着技术的发展,“无人工地”在不久的将来或许也会成为一种现实。
在上述背景下,将目前人工智能、智慧制造、无人操作等相关领域的新技术引入建筑生产领域,研究并提出基于装配式建筑的“无人工地”智慧系统框架,并探讨其在应用场景中关键性问题的解决方法,符合智慧建造的发展趋势,具有非常重要的意义。
2. 装配式建筑无人工地系统(PC-Ucss)概念架构
2.1. 无人工地系统(UCSS)概念的提出
目前,无人系统正不断地改变着我们的生活方式:从移动支付风靡全球,到无人驾驶汽车的高调亮相,再到无人机、无人仓、无人超市等各类无人化场景的出现,无人系统的适用性、安全性、可靠性、经济性不断提高,无人系统也不断尝试在抢险救灾、泥石流清理、核泄漏排查、隧道施工、矿坑作业等各类危险作业场景的应用。而随着信息技术、人工智能以及建筑工业化的不断推进,建筑行业也在发生着深刻的变革。其中被提到最多的便是“智慧建造”的发展。
在中国建筑股份有限公司总工程师毛志兵的眼中,“智慧建造”是通过应用先进技术与装备,实现更大范围、更深层次对人的替代,并从体力替代逐步发展到脑力增强,进一步提升人的创造力和科学决策能力,实现更优品质、更高效率。智慧建造的发展可分为三个阶段,即“感知阶段、替代阶段、智慧阶段” [1]。感知阶段是借助信息技术,扩大人的视野、拓展人的感知能力以及增强人的部分技能。替代阶段是要借助工业化和信息技术,完成人类低效率、低品质或高风险的工作。智慧阶段是借助信息技术“类似人”的思考能力,替代人的大部分生产及管理活动,由一部具有强大的自我学习、自我进化能力的“建造大脑”,指挥和管理智能机械设备完成建造过程,人则向监管“建造大脑”的角色转变。
而依据《中国建筑施工行业信息化发展报告(2017)——智慧工地应用与发展》的数据显示,我国大多数企业对于智慧工地的应用尚处于探索阶段。 [2] 目前绝大多数技术应用主要集中在工程施工现场管理,并围绕人、机、料等关键要素进行单独的应用,同时对于直接影响施工效果的某些关键环节应用较多,整体性应用存在不足。在2021年2月,碧桂园集团在顺德碧桂园凤桐花园项目交付了43台建筑机器人,包括楼层清洁机器人、室内喷涂机器人、地砖铺贴机器人等,其生产效率相对于人工大大提高,但其应用深度和范围存在不足。 [3] 这也说明我们的智慧建造仍处于感知阶段,并在向着替代阶段不断演变。这离我们的智慧建造的最高水平还有一段很长的距离,但这并不妨碍我们对其进行充分的遐想,并以此为目标来推动建筑工业化智慧化水平的提升。
因此,本研究认为专家们提出的智慧建造的第三阶段——智慧阶段——应该就是“无人”阶段,据此将智慧建造发展的三个阶段模式修改如图1的模式。
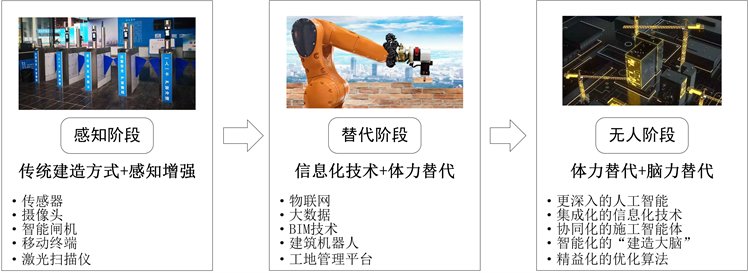
Figure 1. Three stages of “Smart construction”
图1. “智慧建造”的三个阶段
基于上述分析和无人系统的概念,本文提出的“无人工地”系统(Unmanned construction site system, UCSS)是指在施工现场无人参与、有感知、决策和控制能力并能自主完成既定工程目标的系统。其是以信息化、工业化、绿色化为基础,以物联网为信息采集手段,以大数据、云平台构建信息协同中心,通过应用先进技术与装备构建具有独立工作能力的智能体来完全实现对人的替代,并通过人工智能技术使体力替代逐步发展到脑力增强,在实现施工现场无人化的同时又能保证工程建设的更优品质、更高效率。
2.2. 装配式建筑施工实现无人化工地的可行性分析
装配式建筑施工无人化工地系统(Unmanned construction site system for Prefabricated building, PC-Ucss)的实现可行性主要体现在三个方面:一是装配式建筑施工的特点为无人工地的实现提供了可能性,二是建筑业生产未来发展趋势决定了实现无人化工地的必要性,三是各类新兴技术的发展和无人化技术在其他领域的应用为无人工地系统的奠定了实现的技术基础。
2.2.1. 装配式建筑施工的特点提供了实现的可能性
装配式施工是将工厂生产好的预制构件在工程现场通过机械化、信息化等工程技术手段,按不同要求进行组合和安装,建成特定建筑产品的一种建造方式 [4]。装配式建筑施工具有结构构件预制化和施工现场机械化的特点,我们分别从这两个特点来看无人化化实现的可能性。
从结构件预制特点来看,装配式建筑所需的构件,都是在预制构件工厂提前做好,再运输到施工现场进行组装。装配式建筑施工现场不再是传统工地上的多达21种常见的建筑材料、18种工种工人和5类施工机械的混杂式生产过程,而是类似一个总装车间的生产工厂 [5]。未来的装配式建筑施工现场将只涉及构件的运输、吊装、安装等主要工序,大大的简化了施工现场的工作内容,同时施工现场的工人也将得到精简,不再是大量传统的施工工人,而是以产业工人和技术操作工人为主,从而为无人工地的实现提供了可能。
从施工现场机械化来看,装配式建筑施工现场大部分工作均需要配合相应的机械才能完成。例如,构件运输需要用到工程车辆;构件吊装需要塔吊。相较于传统的施工现场,装配式施工对施工机械的需求量更大、要求更高,大大的解放了相应的人工劳动。因此,针对不同的工艺流程,可以将自动化技术、无人化技术以及人工智能领域的相关成果应用于传统的工程机械,构建出具有独立运作能力的智能体。
从施工流程一体化来看,装配式建筑施工针对不同的构件有其固定的工序系统,并且这些工序都是相互衔接的。结构构件的预制化使得构件的生产脱离了施工现场,在施工现场只需对构件进行管理和组装,减少了大部分繁杂的工序。而构件组装完全可以有机器自主完成,就如汽车生产产房里的汽车自动组装。同时,对于不同的构件有其固定的工序系统,工序的固定与人工智能自主学习的相互结合为智慧化控制提供了可能。
2.2.2. 建筑业生产未来发展趋势决定了实现的必要性
在过去的几十年间,我国建筑业取得了巨大的成就,建筑业总产值不断攀升,截止2019年,我国建筑业总产值已达到248,443.27亿元 [6]。同时,也涌现了诸如港珠澳大桥、北京新机场等一大批超级工程。然而长期以来,我国建筑业面临资源利用率低下、安全事故频发、劳动力结构失衡等问题。
1) 在资源利用方面,建筑业直接、间接消耗的能源占到我国全社会总能耗的46.7%,其中既有建筑中95%为高能耗建筑,对环境的影响巨大 [7]。
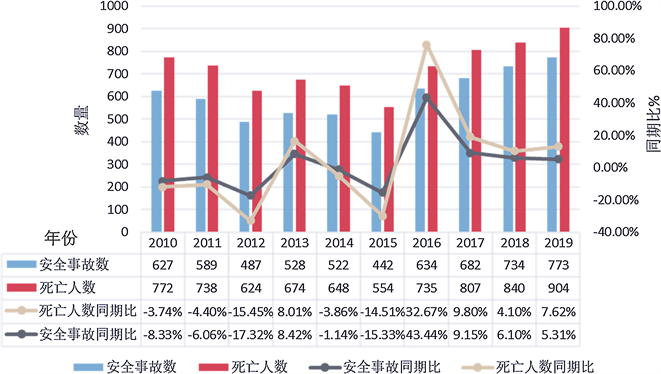
2) 在安全事故方面,由于建筑业施工环境复杂、人员密集以及流动性大等特点,决定了建筑业是一个安全事故频发的高危行业 [8]。近年来,各相关部门以及建筑企业虽然对建筑安全生产做出了许多贡献,安全事故管理总体趋于好转,但有反弹趋势,每年死亡人数和事故数仍不乐观,如图2所示。
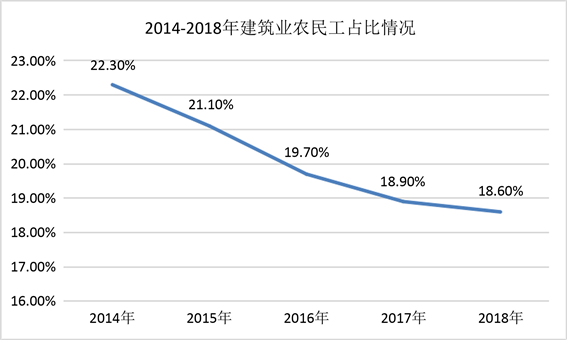
3) 在生产劳动力方面,我们国建筑业劳动力结构的失衡既表现在年龄构成上,也表现在数量。在年龄结构方面,2019年我国建筑业40岁以上农民工占比达49.4%,建筑业劳务人员老龄化问题严重,如图3所示。同时,我国整体老龄化问题也较为严重,联合国人口老龄化标准为存在10%的60周岁以上人口,7%的65周岁以上人口。而2018年末我国60周岁及以上人口达17.9%,65周岁及以上人口达11.9%,因此整体上看我国已步入老龄社会,且老龄化速度已赶超很多发达国家 [9]。在数量方面,建筑业农民工在2014年达到峰值,之后每年都在递减,如图4所示。从事建筑业农民工占总体农民工数量比重逐年递减,直接导致劳动力供给不足,建筑业从业人员减少而建筑业需求不断扩大导致建筑业劳动力供需结构失衡。
 数据来源:中华人民共和国住房和城乡建设部
数据来源:中华人民共和国住房和城乡建设部
Figure 2. Production safety accidents of housing and municipal engineering in 2010~2019
图2. 2010~2019年房屋市政工程生产安全事故情况
 数据来源:国家统计局《2019年农民工监测调查报告》
数据来源:国家统计局《2019年农民工监测调查报告》
Figure 3. Age composition of migrant workers in construction industry in 2019
图3. 2019年建筑业农民工年龄构成
在这样的情况以及新时代背景下,建筑业必须要实现转型升级。而转型升级的重要途径便是推行装配式建筑,并且建筑业也应当抓住新一轮科技革命机遇,大力推进信息技术与建筑业深度融合的智慧建造 [10]。装配式建筑与智慧建造的融合将是建筑业未来发展的趋势,而两者结合的最终形态便是本研究所提出的“无人工地”。
 数据来源:国家统计局《2019年农民工监测调查报告》
数据来源:国家统计局《2019年农民工监测调查报告》
Figure 4. Proportion of migrant workers in construction industry in 2014~2019
图4. 2014~2019年建筑业农民工占比情况
2.2.3. 无人技术、5G技术等新兴技术产生与应用奠定了实现的基础
随着各项新兴技术的不断发展,类似物联网、大数据、云平台、人工智能等技术已经在其他行业得到了一定的应用,并取得了不错的反响和成效,为“无人工地”的构建提供经验。下面对物联网技术、大数据及云平台技术及其应用实例进行介绍。
1) 物联网技术。物联网是指通过各种信息传感器、射频识别技术、全球定位系统、红外感应器、激光扫描器等各种装置与技术,实时采集任何需要监控、连接、互动的物体或过程和各种需要的信息,通过各类可能的网络接入,实现物与物、物与人的泛在连接,实现对物品和过程的智能化感知、识别和管理 [11]。而以物联网技术为基础的农业技术在已经在农业领域得到了一定的运用。以物联网农业小镇——江苏宜兴丁蜀物联网小镇为例,该小镇通过物联网技术嵌入农业的多个环节,助力大田、水产养殖、茶叶种植等农业生产科学化管理,大幅提高了农业生产效率和效能 [12]。
2) 大数据。大数据是当前科技创新发展中比较重要的热点内容,其主要代表海量数据信息资料,一般需要进行特殊处理,以便促使其能够在决策中发挥较强参考价值 [13]。目前,大数据已经在电商领域有了较为广泛的应用。不少电子商务企业通过获取消费者在各项网站和论坛的历史购买信息和浏览记录,并进行统计和分析,已达到精准营销的目的 [14]。
3) 云平台。云平台指的是依托信息与网络技术,在数据处理的过程中具有强大的数据模拟和计算能力,这种强大的计算能力就使其能够完成对市场发展趋势的预测 [15]。在预制构件厂的构件管理方面,云平台技术已经得到一定的应用。构件厂通过搭建预制构件云平台主要解决生产过程及存储、发货流程及物料、试验等过程管理中的问题,避免因信息不对称形成隐患,提高PC构件生产的信息化管理水平 [16]。
在本研究提出的无人工地系统中,通过BIM技术集合建设全生命周期的所有信息,提供协同工作的平台;通过5G技术实现信息数据的实时高速传输;采用大数据和云平台技术搭建管理平台,对工地各组成要素信息进行储存和整理,并依靠人工智能的自我学习能力及判断能力和大数据分析进行决策,对各工作单元进行协调管理,从而实现智能控制 [17]。
2.3. 装配式建筑施工实现无人化工地面临的挑战
结合当前智慧建造在建筑领域的应用,无人工地的实现还面临以下几个关键问题与挑战:
1) 软实力挑战:政策标准及市场基础问题。无人工地在我国尚属于一个比较新颖的理念,发展也处于概念阶段,其在建筑行业的应用缺乏相关的标准和规范,无人化施工情境下法律责任界限也难以界定。无人工地的发展高不开相应的市场规范和市场服务,但目前我国建筑市场缺乏关于工地上应用的通信技术、终端设备数据接口以及建设方面的标准规范,这使无人工地的实现丧失了市场基础 [18]。
2) 推广挑战:前瞻性与实用性之间的平衡问题。无人工地基于互联网、物联网、云计算、大数据、移动终端等技术手段,它的建立离不开先进的网络技术手段和电子设备应用,这较传统施工工地而言无疑增加了工地的运营成本,故而高昂的建设成本也将间接阻碍无人工地的推广。
3) 技术挑战:无人工地的构建涉及各类技术的应用,考验的是平台、软件和硬件的综合运用。信息技术的发展很大程度上制约着无人工地的实现。
尽管无人工地技术目前存在着一些列技术上的不足和可能存在的挑战,并且在我国发展较晚,但是国外已经有了Andrea Rossi [19]、Aaron K. Adik [20]、Shen Geoffrey Qi ping [21] 等一些人的研究成果,我们可以借鉴国外已有技术并且不断探索,坚信无人工地技术的未来一定是可实现的,并且能够可持续发展的。
3. PC-Ucss系统的基本架构
3.1. 系统功能分析
根据系统架构理论,首先要确定系统整体功能和形式 [22]。“无人工地”的核心是实现装配式建筑施工的无人化,并为项目各相关方提供远程管理和监控等服务。这就需要将传统的装配式建筑施工的构件运输、存放、吊装、安装、检查等工序的人机配合协作作业过程,用无人化的施工机械智能体替代,并能赋予智能体能类似人的各种操作、配合和协作过程。
1、在系统功能方面,主要依据装配式建筑施工的特点及主要工序进行分析整合,保证系统功能满足装配式建筑施工的各项要求,如图5所示。
2、对于系统形式而言,形式包括形式对象,以及这些形式对象之间具有的形式关系。本系统中的形式对象则是以智能体为核心的各项生产要素,它们之间的关系则满足施工流程中的协同要求。本系统的形式设计应满足如下的一些基本原则:
1) 完整性
“无人工地”应包括完成装配式建筑施工的所有生产要素,以保证工程项目的顺利进行。
2) 协调性
装配式建筑施工需要各工程机械之间密切配合,同时也要需要梳理好构件运输、存放、吊装与安装之间的生产管理,以保证工地的生产效率。
3) 目的性
项目管理中非常重要的一项内容便是目标管理,所以“无人工地”的构建也应包括目标管理的内容,以高效地实现各项管理目标。
4) 动态性
工程建设是一个动态过程,需要不停地收集信息掌握工程的实际情况,并通过信息反馈的方式不断修正偏差。

Figure 5. Function analyze of PC-Ucss system
图5. PC-Ucss系统功能分析
3.2. 系统的逻辑架构
“无人工地”的构建主要针对装配式建筑的施工工序及所需的功能进行的,并提供一个完整的工地框架。为了实现各项施工工序的无人化,我们将自动化技术、无人化技术以及人工智能领域的相关成果应用于传统的工程机械,从而构建出具有独立运作能力的智能体,包括无人运输车、无人塔吊以及用于构件安装的装配塔等。同时为了满足全面感知及智能监测的需求,这些智能体相较于传统的施工机械,将具有更透彻的感知、更深入的智能化以及更高效的施工控制三个特点。针对以上三个特点,各智能体的构建将从感知层、决策层和控制层三个层次进行设计,而设计的依据这是构件运输、吊装和安装过程中所需要的满足的功能。各智能体也是整个无人工地的基础组成部分。
同时,“无人工地”的构建不是将工地中各个智能体进行简单堆砌,还要寻求各智能体之间的联系,保证工地的正常运转。而在工地的管理活动中,集成管理通过先进技术将工地施工生产中的各关键要素的信息关联起来,形成系统的有机整体 [23]。因此,将集成管理理论运用到工地中,同时结合工地管理的功能需求,需要建立统一的协同信息中心,协同信息中心可以在横向上能促成各个智能体之间的协同化,并在纵向上保证了不同层级信息传递的高效与准确。而且,该信息中心也可以接入第三方平台应用,实现工地管理的可视化。
基于以上分析,本研究提出了如图6所示的无人工地系统逻辑架构,其核心在于依托具有独立运作能力的智能体和集成化的信息协同中心实现无人工地基本生产要素、信息系统和工程目标的闭环及一体化管控。各生产要素、进度控制及现场环境信息通过底层物联网感知技术采集后,分别输入信息协同中心和指导各智能体。智能体可以依据输入信息进行施工并将完成后的结果信息返回信息回协同中心,协同中心通过大数据分析和人工智能的自我学习能力进行反馈以保证工程目标的高效实现。
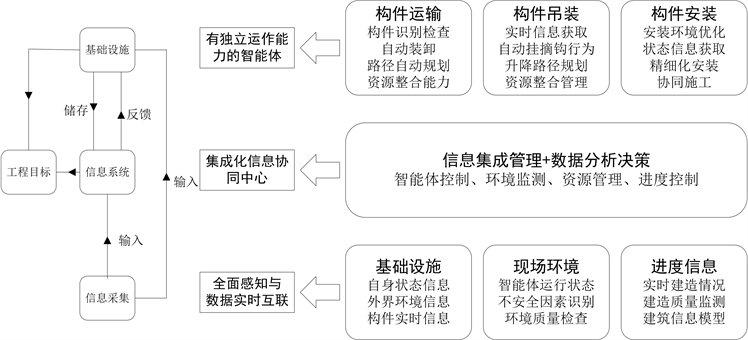
Figure 6. The logical structure of unmanned construction site
图6. 无人工地逻辑架构
3.3. 系统的物理架构
根据上文对PC-Ucss的功能需求分析以及逻辑架构的梳理,本研究设计了如图7所示的装配式建筑施工的无人工地系统架构,包括了信息采集中心、信息协同中心、智能体以及可视化终端平台四个部分。
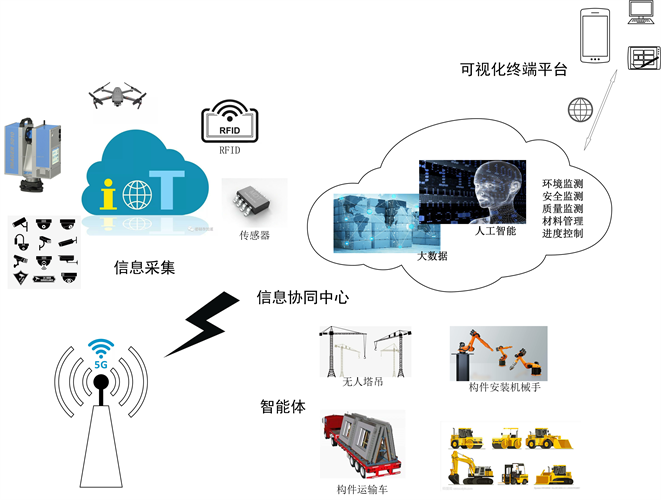
Figure 7. The physical structure of PC-Ucss system
图7. PC-Ucss物理架构
1) 信息采集中心。该部分是以物联网技术为核心,通过各类传感器、图像采集、RFID识别等方式获取信息,并将信息通过网络传递至信息协同中心和智能体,更快地找出施工现场潜藏的安全风险。
2) 信息协同中心。通过对大量数据的分析实现对工地管理的预测功能。同时,通过人工智能自我学习能力及认知智能能够完成对工地现场发生的状况进行分析并作出决策。
3) 智能体。通过运用人工智能、无人驾驶、毫米波雷达等新兴技术实现工程机械自身的无人化操作,具有独立完成对应施工工序的能力。
4) 可视化终端平台。工地现场的实时状况与数据信息可以通过网络信息传递至企业内部,实现远程监控与控制。
3.4. 系统的进程架构
“控制”的实质是通过对系统反馈信息与目标的实时对比,对存在的偏差进行纠正,保证组织实际运行状况与计划保持动态适应的过程,确保系统既定目标的实现。而在项目管理中,其主要内容便是对工地管理主体、生产要素以及工程目标的管理以及对工程目标的控制。在该系统中,通过信息的收集、传递、反馈,实现对工地的实时控制,保证无人工地的稳定运行。以预制墙板的安装为例,其具体路径如图8所示。
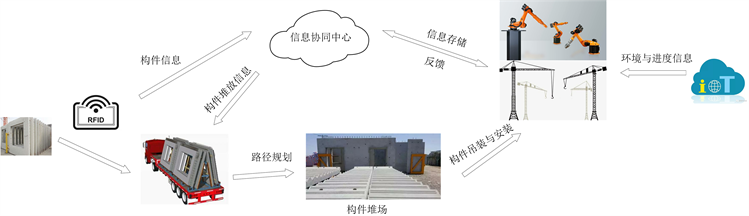
Figure 8. The process structure of unmanned construction site
图8. 无人工地进程架构
4. 智能体的分层和架构
4.1. 智能体及其结构分层
智能体是指驻留在某一环境下,能持续自主地发挥作用,具备驻留性、反应性、社会性、主动性等特征的计算实体。智能体作为PC-Ucss系统中的一个重要组成部分,其能根据外界环境的变化,而自动地对自己的行为和状态进行调整,而不是仅仅被动地接受外界的刺激,具有自我管理自我调节的能力。与此同时,智能体具有与其它智能体或人进行合作的能力,不同的智能体可根据各自的意图与其它智能体进行交互,以达到解决问题的目的。进一步的,智能体能积累或学习经验和知识,并修改自己的行为以适应新环境。
智能体系统架构是智能体的重要成分,是智能体骨架。架构的好坏直接决定了智能体是否稳健、后续是否容易扩展等问题。分层架构模式是目前最常用的软件架构模式之一,这种软件架构模式能够降低智能体系统的复杂度,提高系统可修改性、可重用性、可移植性,减小系统耦合度,易于维。整个软件系统由多个层次构成,每个层次负责某种特定的决策方法,不同层次之间相对独立。典型的分层架构模式有SERA [24],walkman [25] 等。我们拟采用分层架构,依据系统包含的感知模块、决策功能和控制模块。各智能体的构建将从感知层、决策层和控制层三个层次进行设计,三个层次相互配合形成有机统一。其硬件架构如图9所示。
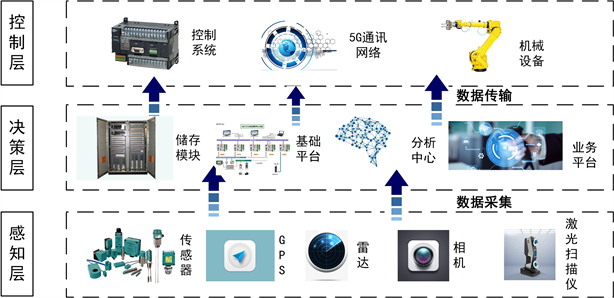
Figure 9. The design of intelligent body’s hardware framework
图9. 智能体硬件架构设计
其软件架构如图10所示。

Figure 10. The design of intelligent body’s software framework
图10. 智能体软件架构设计
4.2. 智能体的感知层
感知层负责各智能体的信息收集工作,主要包括自身状态信息和外部状态信息。主要由各类智能化感知设备构成,底层感知网络主要面向环境感知和自身感知的对物体几何特征、使用性能、健康状态等参数的采集,对于无人工地中的智能体,其感知层的功能大致可以分为两个方面,自身定位和环境感知。
1) 自身定位
智能体实现各自功能的基础是自身的精准定位,不仅需要获取智能体与外界环境的相对位置关系,部分智能体还需要通过自身状态确定自身的绝对位置与方位。主流的传感与定位技术优缺点及定位精度对比见表1。

Table 1. The comparison and selection between location techniques
表1. 定位技术比选
对于无人工地各个位置的智能体,单一的导航方式存在局限,不能同时满足多种场景需求,通常采用多传感器融合的方式增加系统的适应性。
2) 环境感知
环境感知是智能体与外界信息交互的关键。为确保智能体对周围环境的正确理解并做出合适决策,环境感知技术需获得智能体所处位置的环境信息和自身状态信息,为智能体的决策规划提供服务。主流感知技术包括视觉感知、激光感知、微波感知等。
对无人运输车驾驶,影响感知精度的因素主要是粉尘、路况复杂、环境温差大。所以,无人运输车的感知系统需采用多源异构传感器融合的方法,以提高对环境感知的准确性和鲁棒性 [27]。
无人塔吊的感知系统会采用RFID技术采集构件的类型与状态信息,使用毫米波雷达和超声波雷达获取构件的状态信息,为了提高构件吊装精准性,还需要使用相机配合人工智能算法进行图像识别,进一步保证构件吊装的效率。
4.3. 智能体的决策层
决策层由数据存储模块、基础平台、分析中心、业务平台等物理要素组成,将感知层的物理实体以数字化形式映射和管理。由于各个智能体的决策层架构都有所不同,我们选取了路线规划这一具体实例来进行分析与决策层架构的建立。
目前,无人运输车主要使用的行为决策算法有三种 [10],其原理与优缺点对比见表2。
Table 2. The comparison and selection between decision-making layer techniques
表2. 决策层技术比选
无人运输车决策系统将更多地采用规则算法与学习算法结合的方式。顶层采用有限状态机,根据场景进行层级遍历;底层采用学习算法,基于具体场景分模块应用,可发挥学习算法优势,简化算法结构、增强场景遍历的深度,并可减小数据依赖量,保证决策结果的鲁棒性与正确性。
4.4. 智能体的控制层
目前PLC与DCS和FCS是现阶段应用于工业机械中的三大重要控制系统。表3对比了三种控制系统各自的特点与优缺点。
Table 3. The comparison and selection between control layer techniques
表3. 控制层技术比选
目前常用的控制系统中一般都是三大控制系统并存,发挥各自的优势。在智能体的控制层中,结合DCS、工业以太网、先进控制等新技术的FCS将具有强大的生命力。
综上所述,我们对智能体各层进行了技术比选,最终得出智能体的技术选型其具体内涵及功能说明如表4所示。
Table 4. The technique model selection of the intelligent body
表4. 智能体的技术选型
5. 基于黑板系统的智能体协同与监控平台架构
5.1. 智能体协同与监控平台的基本功能
智能协同与监控平台设置主要是承担类似传统工地的项目管理职能,它即是一个总控平台,也是一个类似于项目经理(项目部)的智慧决策系统。可设在企业总部的集成控制中心,控制一个区域内各个工地的现场施工。
5.2. 黑板系统及其在多智能体协同中的优越性
黑板系统具有以下优越性:
1) 黑板系统可以将多种知识源组合在一起,实现问题求解。
2) 允许知识源共享黑板中部分解,这对事先无法确定求解次序的复杂问题尤为有效。
3) 适于进行并行处理,不同任务的知识源可在不同的计算资源上并行执行。
4) 有利于系统开发实验。
5.3. 基于黑板系统的协同平台基本架构
黑板模型是一种很重要的专家系统结构,黑板模型把问题看成是一个产生部分解,并由可靠的部分解组合出一个满意的解的过程。
一般情况下,我们可以把黑板区分为任务信息区、通信信息区、共享信息区三个区。同时将这三个区域和项目部职能进行结合,提出一套应用于无人化施工的黑板系统架构,如图11。
5.3.1. 任务信息区
任务信息区用来对任务的执行情况进行记录并提供实时查询和报告,有两种分解方法:在系统设计时由人工分解或者由设计者提供任务描述然后由任务分解程序分解。
该区域是项目部职能嵌入的基础——将所需的信息依据项目部职能所需要的形式进行划分,并进行分解储存,并实时记录这些数据的变动情况。
5.3.2. 共享信息区
智能体个体工作时自身行为也会产生一些施工信息,在共享信息区存储这些需要各智能体共享的知识和信息。而无人化项目部的职能需要依靠不同的信息之间进行协调统一,以此来进行不同模块的施工工作以及管理工作。
该区域在信息集合之后,进行汇总处理,通过不同的算法,将各个模块的信息用不同的手段进行翻译,提出决策命令,并与其他信息进行实时沟通协调,来完成施工项目部的工作,将施工过程有机地协调起来。
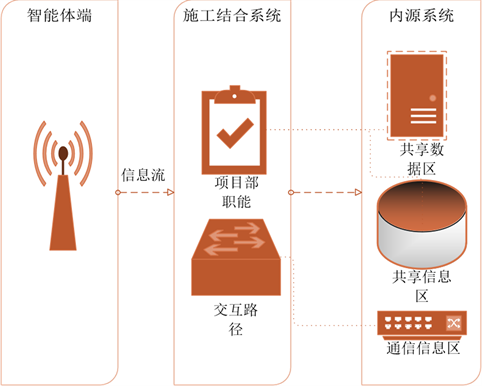
Figure 11. The blackboard system framework adopted to unmanned construction
图11. 应用于无人化施工的黑板系统架构
5.3.3. 通信信息区
这个分区存放智能体之间通信过程信息,通信通过黑板上信息的读写来进行。这些信息我们可以作为问题求解的上下文信息定义在黑板上。我们可以按不同层次分层组织并用黑板的监控机制对这些信息进行跟踪、监视和控制。
5.3.4. 任务分解机制
任务分解需要将复杂零散的信息分别储存在不同的检测区域,并且进行不同的处理。目标是最小化施工任务数量,同时考虑工作开展的先后顺序;为任务分配最合适的智能体和工作点;在考虑各个智能体之间的协调统一情况下,为智能体规划最佳的施工路径
6. 结论与展望
本文通过对无人工地的研究得出了以下结论:
1) “无人工地”装配式建筑与智慧建造的融合是建筑业未来发展的趋势。
2) “无人工地”是以信息化、工业化、绿色化为基础,以物联网为信息采集手段,以大数据、云平台构建信息协同中心,通过应用先进技术与装备构建具有独立工作能力的智能体来完全实现对人的替代。
3) 智能体,可以通过感知层、决策层、控制层有机统一相互配合,根据外界环境的变化自动地对自己的行为和状态进行调整,具有自我学习能力。
4) 智能协同与监控平台在无人工地中担任项目经理的职责,它通过黑板系统进行实现,设在企业总部的集成控制中心,发挥记录、指挥、协调、监控等作用。
无人工地的实现还面临以下几个关键问题与挑战:
1) 因缺乏相关的标准和规范,无人化施工情境下法律责任界限也难以界定。这使无人工地的实现丧失了市场基础。
2) 因为增加了工地的建设成本,故而将阻碍无人工地的推广。
3) 无人工地的构建涉及各类技术的应用,考验的是平台、软件和硬件的综合运用。
未来,无人工地将形成一套完整的,可复制的技术体系以及一套完善的架构系统,从而可以大面积应用到施工建设之中。
致谢
感谢黄有亮教授对于我们课题进行全面的指导以及提供大量的帮助。
感谢MAXON Computer公司的C4D软件为我们的研究提供了动画建模的支持。
基金项目
江苏省大学生创新创业训练项目(S202010286012)、东南大学大学生创新创业训练项目(202005074)。