1. 引言
穿戴式外骨骼机器人作为现在较为热门的一个研究领域,是通过人体工程学设计实现人体下肢与外骨骼高度耦合,由外骨骼机器人带动人体下肢进行步态运动,达到一种良好的训练效果。在机器人外骨骼控制系统的设计中,对轨迹如何进行良好的跟踪控制是运动控制中十分重要的一个部分。轨迹跟踪就是通过一些控制率使得下肢外骨骼机器人的系统能够从任意初始状态到达预设轨迹进行运动,且预设轨迹对系统而言是可以实现的,目的是使得实际运动轨迹与预设轨迹间的误差尽量最小 [1]。良好的轨迹跟踪可以使得下肢外骨骼机器人能够进行更为稳定的运动。
下肢外骨骼机器人的系统是十分复杂的,且具有强耦合性,其轨迹跟踪控制系统也是国内外研究重点。例如,日本的HAL-5下肢外骨骼通过传感器及测试处理获取肌电信号、压力值及关节角度信息进行对系统的控制 [2]。加州伯克利大学运用了灵敏度放大控制进行系统的控制算法研究,简化了传感系统 [3]。浙江大学研发的外骨骼系统是将给定步态作为整体运动系统的输入,利用模糊神经网络等进行控制 [4]。
目前对于机器运动控制主要有计算力矩法、PID控制、自适应控制、智能控制等,还可以将方法组合使用。根据被控系统,跟踪控制分为运动学跟踪和动力学跟踪 [5]。在穿戴该下肢外骨骼助行机器人后,使用者行走过程的动态变化十分复杂,本文首先针对该系统进行了动力学模型的建立,在此基础上设计了RBF神经网络自适应滑模控制器,通过神经网络逼近下肢外骨骼机器人系统的不确定项,同时联合控制系统仿真模块(MATLAB/Simulink)进行仿真分析,通过图像等结果对滑模控制与RBF神经网络自适应滑模控制进行对比,验证所提出的算法的可行性。
2. 动力学模型建立
建立动力学模型的目的是可以为后续的算法提供模型参数。机器人动力学建模通常会采用拉格朗日法、高斯法等 [6]。本文采用拉格朗日法。如图1所示为系统单侧机械结构简化的三连杆模型。如图坐标系中,假设杆件分布均匀,质心分别为c1、c2、c3,杆件1为大腿,杆件2为小腿,杆件3为足部。l是杆件长度,q是关节转动角度,d是杆件质心分别到对应中心的长度,m是杆件质量,I是杆件分别绕对应关节的转动惯量。
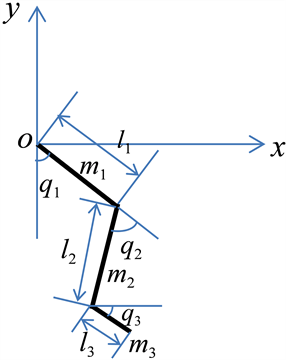
Figure 1. Simplified three-link model of the right mechanical structure of the lower exoskeleton robot
图1. 下肢外骨骼机器人右侧机械结构简化三连杆模型
定义拉格朗日方程如下:
(1)
其中,
为关节驱动力矩,L为拉格朗日函数。同时可以式(2)得到上述模型的拉格朗日函数
(2)
将建立的下肢外骨骼机器人系统信息带入式(2)后,再代入式(1)中可以得到各关节驱动力矩。以髋关节驱动力矩为例,
(3)
式中,
为髋关节驱动力矩。将得到的各关节的驱动力矩代入式(4)
(4)
可得到所建立的三连杆穿戴式下肢外骨骼助行机器人系统的动力学方程。
是3 × 3阶正定惯性矩阵,
是3 × 3阶离心和哥氏力项,
是重力矩向量。由于穿戴式下肢外骨骼助行机器人穿戴后在运动时会受到外界的一些阻力,所以上式中
为摩擦力,
为系统的误差及外界扰动。
3. 基于RBF神经网络自适应控制算法设计
滑模控制是一种较为简单的控制方法。使用后可使得系统对受到的扰动不敏感,且有很强的抑制性 [7]。滑模控制需要通过状态方程进行滑模面
的设计,考虑穿戴式下肢外骨骼机械系统特性,取滑模面为s,式(5)中,
为正对角矩阵,
。
(5)
虽然滑模控制的效果较好,但固有特性会使得存在系统“抖振”。这个问题会使得系统在控制的时候容易不稳定。因此为了改善这一问题,本文将滑模控制与RBF神经网络自适应算法结合进行了相关研究。结合后,将预设轨迹作为系统的输入,输出则是实际的运动轨迹。将系统的关节角度、角速度、角加速度、角度误差、角速度误差作为RBF神经网络的输入,参数根据未知模型来选择,输出为未知模型的逼近项。通过改进的趋近律结合RBF神经网络组成控制器。控制器的输出作为适合被控系统的力矩,使关节角度跟踪预设的步态轨迹,保证误差尽可能的小。对于参数未知的被控系统模型,控制器能够根据状态变量,通过RBF神经网络来辨识未知参数,并且将信息提供给自适应反馈控制器,同时通过自适应控制对RBF神经网络的权值进行调整。自适应神经网络控制比PID有更强的鲁棒性 [8]。
本文所研究的三连杆下肢外骨骼助行机器人的动力学方程如式(4)所示。在实际运动中,模型通常存在未知的不确定项f,
(6)
因RBF神经网络的万能逼近特性,为了提高整体的精准度和稳定性,需要使用其对f 逼近处理。网络算法为
(7)
(8)
其中根据表达式,取网络输入为
,
为理想权值,
为网络的逼近误差,
。
RBF神经网络的输出为
(9)
设计控制率
(10)
v为克服神经网络逼近误差的鲁棒项,鲁棒项设计为
(11)
考虑下肢外骨骼特性及系统的稳定性,神经网络自适应律取
(12)
由构建李雅普诺夫函数可知,系统稳定。
4. 仿真系统的建立及参数整定
在仿真中,被控对象采用上文建立的动力学模型及控制率。通过实际测量可知设计的穿戴式下肢外骨骼助行机器人连杆长度为:l1 = 0.42 m,l2 = 0.41 m,l3 = 0.25 m,质量为:m1 = 4 kg,m2 = 3.1 kg,m3 = 1 kg。实验采用CGA步态数据库提供步态信息,为穿戴式下肢外骨骼机器人的各关节电机提供位置指令。根据设计的控制率及动力学方程,在MTALAB-Simulink内设计的仿真系统如图2所示。

Figure 2. MATLAB-Simulink simulation system of lower walking limb exoskeleton robot
图2. 下肢外骨骼助行机器人MATLAB-Simulink仿真系统
基于MATLAB-Simulink联合仿真时,以下肢外骨骼机器人系统右侧单条腿为研究对象,以6s为一个步态周期进行运动,获取膝关节、髋关节的仿真情况。
本文所设计的RBF神经网络结构设置3个输入层,7个节点,3个输出层。当基于滑模控制算法时调节参数,使得
,
,
。当基于RBF神经网络自适应控制算法时调节参数,使得
,
,
,
,网络的初始权值取零。并对数据进一步处理。利用仿真数据与理论数据得到运动过程中的跟踪误差。
5. 结果与讨论
本文研究了RBF神经网络自适应滑模控制算法。通过对力矩的准确控制进而对角度更精准的进行控制,使得设计的穿戴式下肢外骨骼助行机器人的关节角度轨迹跟踪可以更加精准,整体的系统也更为稳定。同时为验证设计的有效性,进行了仿真对比验证。
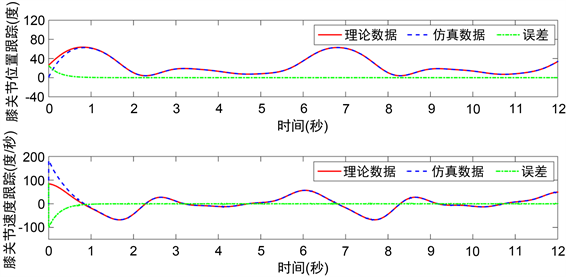
以右侧单条腿为研究对象。通过MATLAB-Simulink仿真实验可得到下肢外骨骼机器人系统在滑模控制下,各关节跟踪曲线如图3所示;在此基础上加入RBF神经网络自适应控制,各关节跟踪曲线如图4所示。两种控制方法下的图像后期都近乎重合,没有过大波动,但在加入RBF神经网络自适应后,从图像可以看出理论数据与实际数据的图像更早的近似重合,能够更快的响应。
 (a)
(a)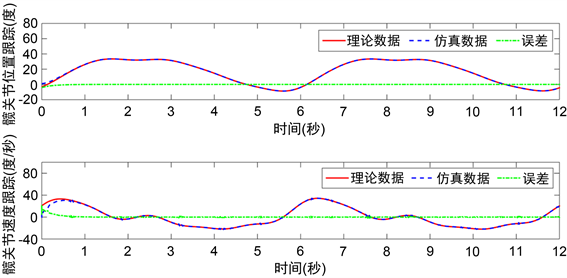 (b)
(b)
Figure 3. The position and velocity tracking curve of the right joint of the lower extremity exoskeleton robot based on sliding mode control. (a) Knee joint; (b) Hip joint
图3. 基于滑模控制的下肢外骨骼机器人右侧关节位置及速度跟踪曲线。(a) 膝关节;(b) 髋关节
 (a)
(a)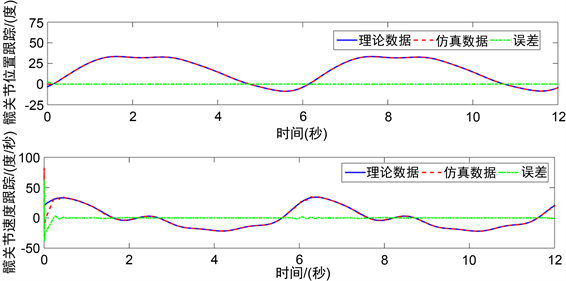 (b)
(b)
Figure 4. The position and velocity tracking curve of the right joint of the exoskeleton robot based on RBF neural network adaptive sliding mode control. (a) Knee joint; (b) Hip joint
图4. 基于RBF神经网络自适应滑模控制的下肢外骨骼机器人右侧关节位置及速度跟踪曲线。(a) 膝关节;(b) 髋关节
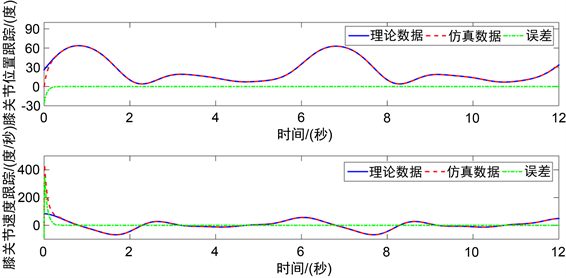
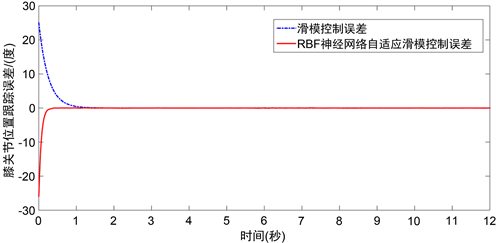
为了更好地看出加入RBF神经网络自适应控制后的优势,对数据进一步处理仿真。首先针对控制过程中的跟踪误差进行处理。得到的误差数据图像如图5所示。滑模控制约在1 s左右达到近乎稳定的状态,
 (a)
(a)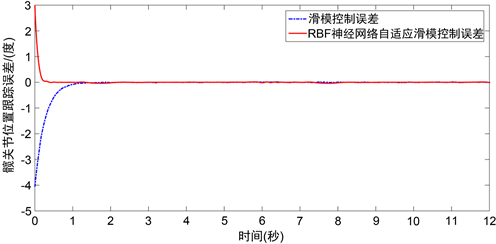 (b)
(b)
Figure 5. Tracking error comparison curve of the right joint position of the lower exoskeleton robot. (a) Right knee joint (b) Right hip joint
图5. 下肢外骨骼机器人右侧关节位置跟踪误差对比曲线。(a)右侧膝关节;(b) 右侧髋关节
加入RBF神经网络自适应控制后,则更迅速的达到了近乎稳定的状态。即RBF神经网络自适应滑模控制可以更早的实现零误差,跟踪精度和响应速度都较好,调节时间更短,结合RBF神经网络后,轨迹跟踪更好,更快的使得误差为0。
同时,为了更好的展现RBF神经网络自适应控制对滑模控制抖振现象的改善,对下肢外骨骼助行机器人系统的控制力矩进行对比仿真。滑模控制下的控制力矩抖振现象较为明显突出,尤其是在髋关节的控制上,如图6所示。加入RBF神经网络自适应控制后,控制力矩的曲线明显更为顺滑,如图7所示。即可以通过力矩的仿真图像明显看出加入RBF神经网络自适应后,系统各关节的抖振情况有好转,在未加入RBF神经网络前都有些许抖振,加入后情况变好,从髋关节的力矩控制图像可以尤为明显的看出这一改善。

Figure 6. The torque curve of the right joint of the exoskeleton robot based on sliding mode control
图6. 基于滑模控制的下肢外骨骼机器人右侧关节力矩曲线
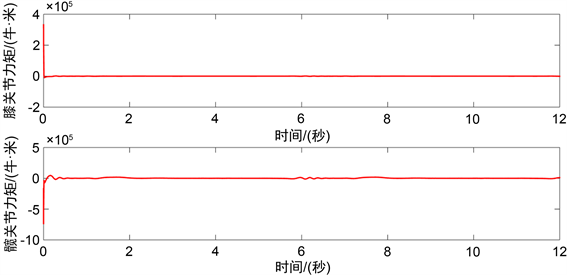
Figure 7. Torque curve of right joint of lower limb exoskeleton robot based on RBF neural network adaptive sliding mode control
图7. 基于RBF神经网络自适应滑模控制的下肢外骨骼机器人右侧关节力矩
穿戴者使用下肢外骨骼机器人之后,使用者在行走过程中外界会产生干扰及摩擦等使得关节实际转动角度与预先设置的角度产生偏差,因此要使用控制算法来提高关节轨迹跟踪的精准度。经典PID控制在机器人控制系统应用广泛,但设计时通常会忽略干扰对整体系统影响,添加重力项又会加长计算时长,增大负担 [9]。单纯的加入滑模控制后虽然对系统遭遇的扰动不灵敏,能很强抑制扰动,但是抖振现象会使得系统的稳定性等变差 [10]。自适应系统的控制器是可以调节的,通过增加自适应回路使得适用对象更广泛,不需要了解精准的数学模型,就可以对被控对象进行控制方案的设计。同时在多种神经网络算法中,RBF神经网络有可以逼近任意非线性函数的特性,且收敛速度快 [11]。因此,可以将滑模与自适应神经网络结合使用,用来改进抖振的影响,进一步提高对轨迹跟踪的精确度与稳定性。结合后可以通过RBF神经网络对系统自适应逼近来减小切换增益,使抖振得以改善。
在本研究中,通过对滑模控制及RBF神经网络自适应滑模控制分别MATLAB仿真,获得了多组仿真效果图。可以看到滑模控制可以使得系统对于外界扰动不明显,很强的抑制干扰,但是抖振情况也会对系统产生影响,加入RBF后,可以达到即快速响应,抗干扰,又减少抖振的情况。本文提出的将RBF神经网络自适应滑模控制,既有滑模控制优点,也有神经网络自适应的优势,达到更好的效果,对下肢外骨骼助行机器人的轨迹跟踪控制是一个更好的选择。
6. 结论
本文以下肢外骨骼助行机器人的右腿为例,在滑模控制的基础上加入RBF神经网络自适应算法,建立了相应控制系统,并且通过MATLAB-Simulink对通过拉格朗日函数建立的三连杆下肢外骨骼助行机器人系统进行联合仿真。结果显示,RBF神经网络自适应滑模控制算法比滑模控制算法在对于轨迹跟踪的控制上更加准确稳定,并且可以比滑模控制更早地进行响应,既能更好地克服外界的干扰及误差,也能解决抖振问题,能使得穿戴式下肢外骨骼助行机器人与穿戴者之间更加得协调统一。
基金项目
上海市产业协同创新项目(编号:2021-cyxt1-kj07);上海市自然科学基金面上项目(编号:20ZR1437700);上海介入医疗器械工程技术研究中心Shanghai Engineering Research Center of Interventional Medical Device (编号:18DZ2250900)。
NOTES
*通讯作者。