1. 引言
如今大量多智能体设备已经被广泛应用,如无人机、无人车和快递机器人等。多智能体的控制问题日渐成为现在研究的热点问题。而其中多智能体的协作控制问题更是多智能体控制研究的重点。因为多智能体的协作可以起到一加一大于二的效果,如蜂群和蚁群就是多智能体协作的典范。包含控制问题就是协作控制的典型代表。多智能体的有领导者的包含控制是多智能体的基础研究问题之一,并且在线性系统上取得了令人瞩目的成果。但是,非线性的多智能体则需要人们进一步去研究。在 [1] 中,作者研究了有移动拓扑和无遏制模型的多智能体系统。在 [2] 中,作者更进一步研究了半马尔可夫的系统。实际多智能体系统中,一般都有未知非线函数的存在。因此由于神经网络和模糊控制系统可以逼近未知光滑函数的特性,他们已经成为一种普遍的逼近器并被用于处理在非线性系统中的非线性项。值得注意的是很多的非线性控制设计只能在严格反馈中起效,并不能在非严格反馈中起效,而实际系统大多数又是非严格系统。因此研究多智能体系统的非严格包含问题有重大实际价值。
在实际应用中,多智能体的传感器是负责感知外部世界和传输数据的。如果传感器故障发生,它会影响整个多智能体系统的稳定性和安全性。因此对传感器故障进行补偿控制是重要的。在 [3] 中,滑模面控制器被用来探测传感器故障。在 [4] 中,由相对输出测量方法驱动的评估器去解决传感器故障。在 [5] 中,通过模拟技术,由传感器故障造成的自适应率增加的问题得到避免。在 [6] 中,作者提出了一种通过其他多智能体协作来发现并处理传感器故障的方法,并且此方法可以使得多智能体系统达到一致性控制的目的。尽管上述有很多关于多智能体系统传感器故障的研究,但是针对传感器故障的多智能体的包含控制问题却少有人研究。因此研究具有传感器故障的多智能体系统的包含问题依旧存在很大价值。
系统的指定性能控制是指某些系统误差在人为设定范围内,这种控制方法在工业流程有重要的意义。在近期,一些新的指定性能的控制方法被提出。特别是在 [7] 中,通过把追踪误差转变为一个新的误差变量,使得带有误差限制的多输出多输入非线性系统中的状态反馈问题得以被研究。在 [8] 中,作者通过采用状态观测器去评估未知状态,研究带有输出反馈多输出多输入非线性系统的指定性能问题。在 [9] 中,一个中心未知模型的指定性能控制方法被设计应用在多智能体系统中。上述控制方法虽然有些考虑了指定性能在多智能体系统中的应用。但是多智能体系统中的包含问题却没有被考虑。
由上述论文的启发,本文通过结合反步法,解决了带有传感器故障的多智能体系统指定性能的包含控制问题。本文的主要贡献点如下:
1) 对于多智能体系统,一个自适应容错控制器被提出。此控制器可处理传感器故障并使系统到达稳定。
2) 本文针对多智能体系统的包含问题,提出了一种达到指定性能的方法。目前这类研究极少。
3) 证明指定性能控制和传感器故障容错控制可以在多智能体系统中共存,并同时解决包含控制问题。并且本文证明了所有包含控制误差是半全局一致最终有界的。
本文结构如下:第二部分主要讲述了系统模型,传感器故障模型,必要的引理和相关数学不等式。第三部分证明了所提出的控制器是可以使得系统的包含控制误差是半全局一致最终有界,达到控制目标。第四部分是仿真实验。第五部分是文章总结。
2. 预备知识与问题阐述
2.1. 系统描述
对N个跟随者和M个领导者的多智能体系统,第i个跟随者的系统方程为:
(1)
其中
是系统状态向量,
是第i个智能体的输出,
是未知光滑函数。
是系统输入。领导者的信号为
。
根据 [10],传感器故障可被表示为:
其中
,
,
和
为正常数。下面有4中故障情况:
1) 当
,
为一个正常数时,系统发生偏差故障。
2) 当
,
时,系统发生漂移故障。
3) 当
,
,
时,系统发生精度确实故障。
4) 当
,
时,系统发生传感器失效故障。
设
。
可被表示为:
的导数可被表示为:
其中
。
2.2. 神经网络
神经网络经常被用于在某个紧集
上去逼近未知连续函数。对任意给定的连续未知函数
,都存在一个神经网络
和未知正常数
,使得下式成立:
其中
是理想神经网络权重向量,
代表神经网络节点数。
基函数向量。为了分析,我们定义理想神经网络权重
。由此可得,若神经网络可以逼近函数
,则下式成立:
其中
是逼近误差,并
。本文用
来代表权重向量。
2.3. 图论
对于由M个领导者和N个跟随者的多智能体系统,一个有向图可以描述他们之间的通信连接。设
为一个邻接矩阵。如果智能体i可以收到智能体j的信号则
,否则
。在本文中智能体不存在通信闭环,所以
。此处定义
为智能体i的连接权重。
2.4. 指定性能控制
通过确保包含控制误差
被严格限制下列不等式中,则指定性能控制可以完成:
(2)
其中
和
为指定性能函数。在此,我们选择
为指定性能函数,其中
,
。本文会选择合适的参数使得
通过下式把有约束的包含控制误差变为等价的无约束问题;
其中
是转换误差,并且
是严格递增的:
由上式可得:
定义下面的状态转换,
根据 [11],如果
成立,并且误差
有界和存在一个正常数
,使得包含误差
,则系统达到指定性能。
3. 包含容错控制器设计
在本节中,反步法技术将会被用来设计自适应控制器。系统的包含误差定义如下:
(3)
(4)
(5)
其中
为第
步的虚拟控制器。
3.1. 步骤一
由公式(1)和(3)可得:
(6)
设
(7)
其中
和
是正的设计参数。
是故障自适应率,
是系统自适应率,
,
,具体含义稍后解释。
由(6)和(7)可得:
(8)
设
,
。
用神经网络逼近
,
。
其中
和
是两个神经网络的理想权重向量,
,
,
。由杨氏不等式得:
(9)
(10)
其中
和
是常数。
于杨氏不等式得:
(11)
把(5)、(9)、(10)和(11)带入(8)得:
(12)
由(12)可得虚拟控制器为
为设计参数。
故障自适应率和系统自适应率为:
和
为设计参数。得
(13)
3.2. 步骤二
当
时
由(1)和(5)得:
(14)
设第m阶得李雅普诺夫函数为:
(15)
和步骤一类似,我们可以得到第m阶的虚拟控制器:
(16)
和
分别是常数和设计参数。
第m阶的自适应率为
(17)
为设计参数。
可得出:
(18)
3.3. 步骤三
当
时,由(1)和(5)得:
(19)
设第n阶的李雅普诺夫函数为:
(20)
与步骤二类似,实际控制器:
(21)
和
分别是常数和设计参数。
第n阶自适应率为
(22)
为设计参数。
(23)
4. 稳定性分析和仿真实验
4.1. 稳定性分析
基于上述讨论我们可以得到如下理论。
理论:针对多智能体系统(1),基于(3)、(4)、(5)一个容错包含控制器被提出。确保多智能体系统的信号都半全局一致稳定。
证明:
定义多智能体系统的函数:
根据(23)和杨氏不等式,可得:
(24)
令
(24)式可变为
根据文献 [12],此时多智能体系统内所有信号已达到半全局一致最终有界稳定。控制系统得包含误差有界。根据文献 [11],此时的包含误差的以达到指定性能,证毕。
4.2. 仿真实验
在本小节中,一个仿真实验将被用于证明本文提出控制方法的有效性,仿真将用MATLAB进行。跟随者仿真系统模型如下:
系统故障模型是
指定性能函数分别是
领导者信号为
拓扑图如图1所示:
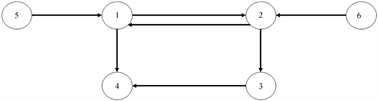
Figure 1. Communication graph, 5 and 6 are leaders
图1. 仿真通信拓扑图,其中智能体5和6是领导者
仿真结果如图所示,图2显示的是领导者信号和追随者信号。图3是各个智能体指定性能效果图。
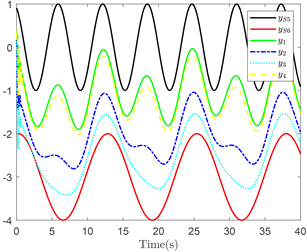
Figure 2. The trajectories of followers
图2. 各智能体的输出信号
从图2可以看出,所有追随者的信号都在领导者的信号的凸包内,并且故障一直都在发生,但没有影响系统的稳定。从图3可以看出,所有追随者的误差信号指定性能的函数内,并保持稳定。
在合适的参数下半全局一致最终有界稳定的适用范围更广,不需要系统严格按照狭义的李雅普诺夫稳定定理。
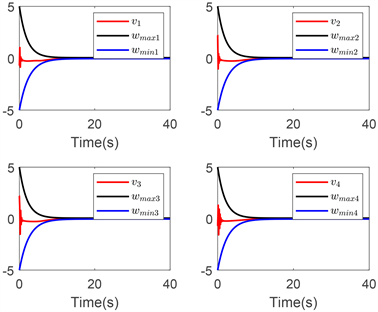
Figure 3.
of the follower error within the specified performance
图3. 追随者误差的
在指定性能内
5. 总结
在此篇文章中,我们研究了含有传感器故障和指定性能的多智能体系统包含控制问题。通过反步法得到控制器,并使所有信号稳定有界。所有追随者的信号都在领导者信号所形成的凸包内。达到半全局最终一致有界。证明本文所提方法的正确性。
参考文献