1. 引言
我国稀疏道路所在地区一般地域广袤,公路面积密度低,道路分布呈明显的稀疏特征。该类稀疏道路的特点包括道路连通度差、车流量低、车速较快,往往经过人口稀少区域 [1] [2],受经费限制,一般缺乏交通检测和预警系统,交通事故发生后不易发现。因此,建立适用于稀疏道路的交通事件检测系统,具有重要的现实意义。
道路交通事件的检测算法主要分为两类,一类是经典的交通事件检测算法(如加利福尼亚算法 [3]、标准差算法 [4]、贝叶斯算法 [5]、马克马斯特算法 [6] 等),另一类是智能交通事件检测算法(如神经网络算法 [7]、模糊逻辑算法 [8]、支持向量机算法 [9] 等)。这两类方法的事件检测机制基本相同,即:分析道路宏观交通流参数(一般为流量、密度、占有率或其组合形式)的变化状况,一旦这种变化十分显著,并超过了设定的阈值范围,则认为交通事件发生。该检测机制仅适用于道路交通流量较大、负荷水平相对较高的情形;当道路的交通流量较低、负荷水平较低时,如夜间城市快速路、稀疏道路,即使道路发生了交通事件,宏观交通流基本不受影响,这一交通事件检测机制失效。
在稀疏道路低流量条件下,可配置车载事件检测单元、电子标签、全球定位系统等设备,实现对个体车辆的跟踪,但受经济社会发展水平所限,这些设备的配置比例难以达到相应的规模。近年来,无人飞机技术日益成熟、飞行管制政策有所放松、单机成本显著下降,再加上其机动、灵活、视野广等特点,无人飞机已广泛用于交通信息采集 [10]、环境监测 [11]、安全执法 [12] 等领域。
部分文献对稀疏道路的道路标志分级、无人飞机部署等问题进行了研究。文献 [13] 结合新疆稀疏路网的道路和气象条件,明确了稀疏道路交通标志设置的方法,提出了稀疏道路交通标志的设置体系。文献 [2] 将无人飞机技术应用于稀疏路网的交通监控,提出了稀疏路网交通监控子区的划分方法,然后在交通监控子区内,优化无人飞机的巡航路线。然而,在无人飞机的道路事件检测效果评价方面,无人飞机的事件检测率如何,地面交通监控设备和无人飞机联合检测的效果怎么样,目前研究甚少。因此,本文面向安装视频监控的稀疏道路,引入无人飞机技术,建立由视频摄像机和无人飞机组成的地空交通检测系统,提出稀疏道路的交通事件检测数值模拟方法,进行地空交通检测系统的事件检测效果评价。
2. 地空交通检测系统
稀疏道路交通事件的界定为:由某些原因导致的车辆停车行为,且车辆的行程时间延误明显,停车原因包括发生交通事故、车辆抛锚、停车休息等。
建立由视频摄像机和无人飞机构成的地空交通检测系统,以适应稀疏道路条件下的交通事件检测需求。视频摄像机可布设在交通事故多发路段,将其监视范围内的实时道路运行状况视频传到交通监控中心,由人工进行交通事件的判别;无人飞机通过装载不同的成像传感器,可获取侦测目标的图像,并通过无线传输系统,实时传输侦测图像至控制后台,为监控人员提供实时的交通监控视频,通过人工或图像识别的方法进行车辆识别和事件检测。通过视频目标检测,车辆速度检测出来以后,当车辆的速度低于某一设定阈值(如5 km/h),则认为该车辆发生交通事件。该系统以地面视频摄像机为主,进行定点、定范围、连续的事件检测,以空中无人飞机为辅,进行广域、机动的事件检测,构筑覆盖范围广、采集成本相对较低的交通检测系统。
3. 事件检测数值模拟方法
目前,交通事件数据主要有两种来源:一种是通过实际的观测统计得到的,另一种通过计算机模拟生成确定。由于交通事件的发生具有成因多样、发生时间和地点随机等特征 [14],交通事件的现场采集成本较大,且稀疏道路的交通事件数据统计不完备,因此本文采用数值仿真的方法模拟交通事件,该方法使用起来较为灵活,能够方便地通过调节仿真模型的形式和参数来模拟现实的交通环境情况。
3.1. 地空交通检测系统事件检测原理
视频摄像机和无人飞机的交通事件检测原理为:发生交通事件的车辆停驶在道路上,当车辆的停驶位置处于视频摄像机和无人飞机的时–空监测视野范围内时,则认为检测到交通事件。
无人飞机的交通事件检测原理如图1所示,图中横轴代表时间、纵轴代表道路的里程,密集的纵向斜实线代表道路上行驶车辆的时空轨迹图,三条横线代表有3辆车发生交通事件,且停驶于道路某一位置不动,平行的两条虚线代表无人飞机在飞行过程中的侦测范围,平行线的纵向距离代表无人飞机的侦测视野范围,它由无人飞机的飞行高度、机载摄像机的技术参数共同决定。
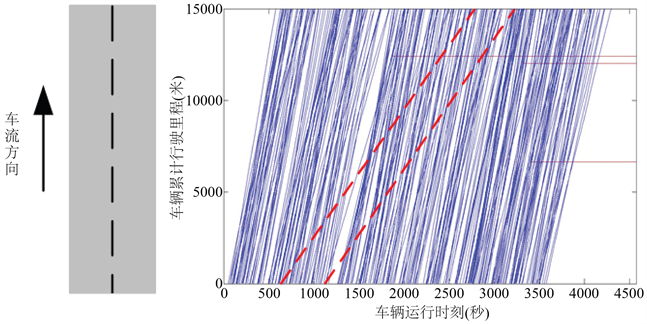
Figure 1. Diagram of UAV detecting incidents
图1. 无人飞机事件检测示意图
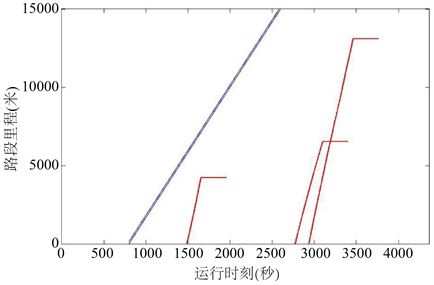
无人飞机检测交通事件的情形如图2所示,图中斜直线代表无人飞机的侦测视野范围,三条折线代表三辆停驶车辆的时空轨迹线,轨迹线的横向线段长度为5分钟,当该横向线段与无人飞机的侦测视野范围斜直线相交时,则认为无人飞机检测到交通事件,即交通事件发生5分钟内无人飞机能够检测到该交通事件,图2(a)表示无人飞机未检测到交通事件,图2(b)表示无人飞机检测到一起交通事件。
 (a)
(a)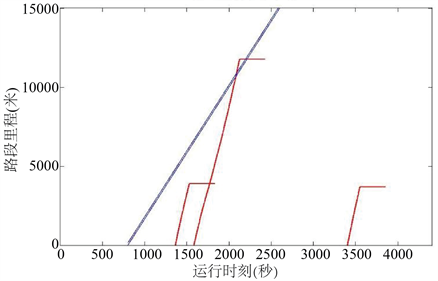 (b)
(b)
Figure 2. Scenarios of UAV detecting incidents. (a) No incidents detected by UAV; (b) One incident detected by UAV
图2. 无人飞机检测事件的情形。(a) 无人飞机未检测到事件;(b) 无人飞机检测到一起事件
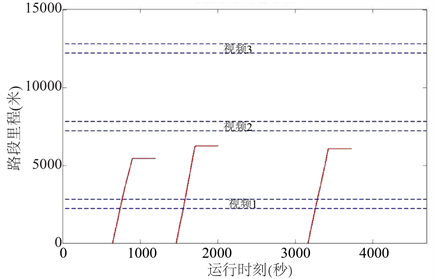
视频系统检测事件的情形如图3所示,图3(a)表示视频系统未检测到事件,图3(b)表示视频系统检测到一起事件。
视频–无人飞机综合系统检测交通事件的情形如图4所示,图中表示该系统检测到一起事件,且该事件均被无人飞机和视频检测到。
上述无人飞机检测系统以及视频–无人飞机联合检测系统中,无人飞机从路段起点出发,飞往路段终点,对路段的侦察只有一趟,为更好地发挥无人飞机机动、灵活的特点,提高地空交通检测系统的事件检测率,将无人飞机的单次飞行改为无人飞机对路段进行往复、折返侦察。
 (a)
(a)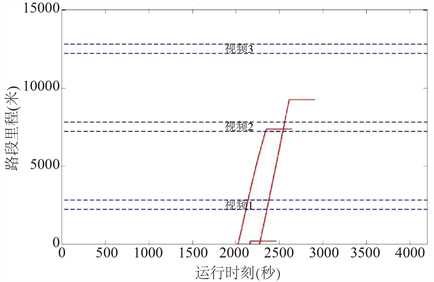 (b)
(b)
Figure 3. Scenarios of videos detecting incidents. (a) No incidents detected by videos; (b) One incident detected by videos
图3. 视频检测事件的情形。(a) 视频未检测到事件;(b) 视频检测到一起事件
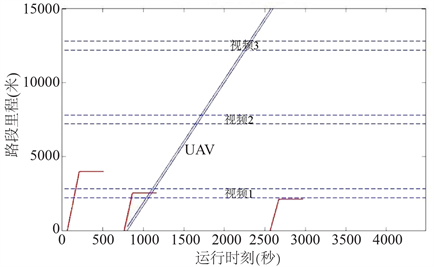
Figure 4. Scenario of video-UAV detecting incidents
图4. 视频–无人飞机系统检测事件的情形
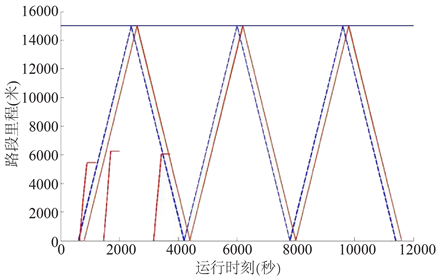
无人飞机折返侦察过程中的交通事件检测原理如图5所示。在图5(a)无人飞机检测系统中,无人飞机在某路段折返飞行了6次,但仅在第2次折返飞行过程中检测到事件的发生;在图5(b)无人飞机–视频联合检测系统中,发生了3起事件,这3起事件的发生位置均不在视频摄像机的监控视野范围之内,且仅在无人飞机第2次折返中被检测到。
 (a)
(a)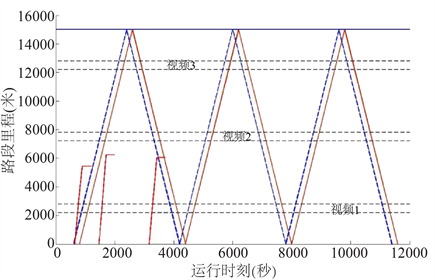 (b)
(b)
Figure 5. Incidents detected by UAV shuttle flights. (a) UAV detecting incidents; (b) Video-UAV detecting incidents
图5. 无人飞机折返侦察检测交通事件。(a) 无人飞机检测系统检测事件;(b)视频–无人飞机联合检测系统检测事件
3.2. 数值模拟方法与参数设置
稀疏道路条件下的地空交通检测系统的事件检测数值模拟方法如图6所示,该方法的四个步骤包括:
1) 设置交通流、道路、视频和无人飞机的参数;
2) 生成交通事件;
3) 视频摄像机的交通事件检测;
4) 无人飞机的交通事件检测。
交通事件生成模块由交通事件参数决定,事件检测数值模拟方法中参数设置情况为:
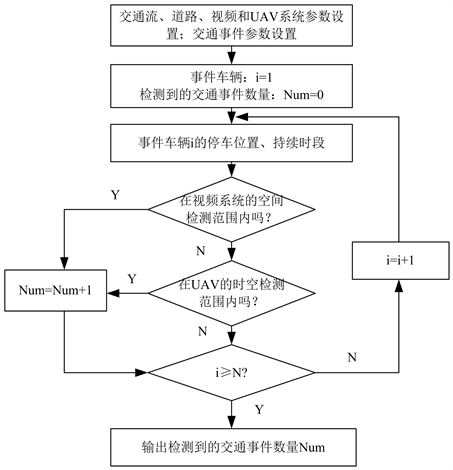
Figure 6. Flowchart of traffic incident detection numerical simulation
图6. 交通事件数值模拟方法流程图
1) 交通流参数:车流量、车速分布、车辆的运行时间(确保车辆能够跑完道路全程);
2) 道路参数:道路长度;
3) 视频参数:视频的数量、安装位置、视频的监测范围;
4) 无人飞机参数:无人飞机的数量、无人飞机的起飞侦察位置及时刻、无人飞机的监测范围、无人飞机的飞行速度;
5) 交通事件参数:交通事件的数量(N起,等价于N辆车发生交通事件)、车辆发生事件的位置及持续时间。
3.3. 事件检测评价指标
在地空交通检测系统中,不同的交通检测子系统(图2~5)对应着不同的事件检测效果,需要有统一的评价指标进行比较。因此,提出事件检测率这一指标,衡量不同交通情景下的不同交通检测子系统的事件检测效果。
(1)
其中:IDR (Incident Detection Rate)为事件检测率;NDI (Number of Detected Incident)为仿真中检测到的事件总数量;TNI (Total Number of Incident)为模拟生成的事件总数。
4. 交通事件检测数值模拟分析
文献 [15] 对稀疏道路的交通流运行参数进行了实地调查与分析。本文选取15 km长的双车道封闭路段作为测试道路,车辆的道路流量、车速均值、车速均方差参数与文献 [15] 相同,分别为300 veh/h、90 km/h和10 km/h,车速波动程度为每秒1 km/s,车速的最低、最高值分别为60 km/h和120 km/h,模拟生成1个小时的交通运行状况。其中,每辆车的运行时间设为1000秒,确保车辆驶完测试路段,车辆发生交通事件率为1%,交通事件车辆随机产生,车辆发生事件的位置随机生成,要求检测系统在检测时间内(5分钟)检测到交通事件,分单一无人飞机检测系统、单一视频摄像机系统、视频–无人飞机联合检测系统、考虑无人飞机折返的四种情形,在MATLAB平台中仿真交通事件的检测效果。
4.1. 无人飞机检测系统
在该系统中,基准仿真情景为无人飞机从道路起点起飞飞往道路终点,巡逻一趟,飞行速度为30 km/h,侦测视野范围为150 m,开始侦察时间为第800秒(即交通运行仿真800秒后,无人飞机开始侦察),要求5 min内检测到交通事件。对上述情景进行3000次仿真,其交通事件检测率为8.80%。
4.2. 视频摄像机检测系统
在该系统中,基准仿真情景为在路段均匀布设3个视频摄像机、检测视野范围为300 m (单向)。对上述情景进行3000次仿真,其交通事件检测率为12.46%。
4.3. 视频–无人飞机联合检测系统
单一无人飞机检测系统与单一视频摄像机检测系统组合构成视频–无人飞机联合检测系统,该综合系统的参数与单一系统的参数相同,此为情景1;情景2中交通事件的发生率由1%提高到2%;情景3中交通事件的发生率由1%提高到3%;情景4中路段的长度由15 km下降为10 km;情景5中路段的长度由15 km下降为5 km。对上述系统的不同情景分别进行1000、2000、3000次仿真,可以得到不同情景的交通事件检测效果,如表1所示。

Table 1. Traffic incident detection rate by video-UAV detecting system (%)
表1. 视频–无人飞机联合检测系统的交通事件检测率(%)
由表1可知,同一情景的不同次数的仿真结果互不相同,但数值差异不大,这体现了仿真的随机性,也反映出了仿真中的交通事件检测的一般特征。在视频–无人飞机联合检测系统中,3000次仿真后的交通事件检测率为20.31%。
4.4. 考虑无人飞机折返的事件检测
实际上,无人飞机可在其续航里程范围内,对侦察路段进行往返飞行侦察,多次侦察路段的交通运行状况。因此,在单一无人飞机检测系统、视频–无人飞机联合检测系统中考虑无人飞机的折返因素,分析此情形下的事件检测率。考虑UAV折返的视频–无人飞机联合检测系统仿真情景参数,如表2所示。
Table 2. Simulation scenario parameters of video-UAV detecting system considering UAV shuttle flights
表2. 考虑UAV折返的视频–无人飞机联合检测系统仿真情景参数
对上述系统的不同情景分别进行1000、2000、3000次仿真,可以得到不同情景的交通事件检测效果,如表3所示。在视频–无人飞机联合检测系统中,3000次仿真后,无人飞机的侦察次数为2次时,事件检测率为26.05%,无人飞机的侦察次数为6次时,事件检测率达60.64%。
Table 3. Traffic incident detection rate of different scenarios considering UAV shuttle flights (%)
表3. 考虑UAV折返侦察的不同情景的交通事件检测率(%)
5. 无人飞机事件检测实验分析
在新疆自治区库尔勒–库车高速上进行了无人飞机的事件检测效果测试工作。实验中使用车辆停靠路边的方式模拟交通事件,无人飞机则沿着路段飞行拍摄道路的交通运行状况,然后运用动态视频图像识别技术提取静止车辆,从而分析事件检测效果。实验情景如图7所示,其中图7(a)为实验路段,图7(b)为实验车辆,图7(c)为基于无人飞机视频的静止车辆检测。
 (a) 测试道路
(a) 测试道路  (b) 实验车辆
(b) 实验车辆  (c) 静止车辆检测
(c) 静止车辆检测
Figure 7. Experimental situation of UAV incident detection
图7. 无人飞机事件检测实验情景
本实验路段长15 km且未安装交通检测设备,无人飞机的侦察视野为150 m,无人飞机以30 km/h的速度沿路飞行10次,三辆实验车随机地停靠在路边10次,用于模拟30起交通事件,实验结果如表4所示。由表4可知,实验中无人飞机的事件检测率为6.67%,与基于视频的静止车辆检测率为100%时(理想状态)的仿真事件检测率相比,相对误差为24.20%。与基于视频的静止车辆检测率为87%时(实际状态)的仿真事件检测率相比,相对误差为12.92%。这说明无人飞机的事件检测效果较好,交通事件的样本规模可能对检测结果产生一定的影响,实验结果表明无人飞机具备在稀疏道路中开展交通事件检测的能力。
Table 4. Analysis of UAV incident detection results
表4. 无人飞机事件检测结果分析表
备注:在库尔勒–库车高速上,基于无人飞机航拍图像的静止车辆检测精度为87%。
6. 结论
面向稀疏道路,建立了由视频和无人飞机组成的地空交通检测系统,提出了交通事件检测的数值模拟方法,并进行了数值仿真和实验研究,主要结论有:
1) 单一视频检测系统的基准情景的事件检测率为12.46%,引入无人飞机后,视频–无人飞机综合检测系统的事件检测率提高到20.31%。这表明:引入无人飞机可以有效地提高地面交通检测系统的事件检测率。
2) 无人飞机对路段进行折返侦察,可扩大对监测路段的时–空二维覆盖范围,从而有效地提高检测系统的事件检测率。
3) 无人飞机具备在稀疏道路中开展交通事件检测的能力。
基金项目
天津市智能交通技术创新团队重点培养专项(XC202028),天津市高等学校科技发展基金(2021KJ018),天津市研究生科研创新项目智能网联汽车专项(2021YJSO2S32)。
NOTES
*通讯作者。