摘要: 近年来,江河湖库等大水域水质空间异质性调查,以及水体表层与水下、上下游/左右岸等污染分布的立体化检测应用需求显著增长。不同于有缆遥控水下机器人(ROV)的技术路线,本文提出一种基于自主水下机器人(AUV)的大水域水质三维空间分层检测系统(简称:WGD-AUV系统)设计模式;通过AUV搭载多参数(5~12种/类)水质传感器,AUV按照电子地图预置路径规划,自主避碰–避障和长航时航行,以及与岸基仪器协同工作,以实现全测量域的水质三维(水深及经纬度)空间分层检测和点测数据校核与全域数据的测验整编。本文提出的新型WG-AUV系统设计模式,为适应我国的大水域水质分异性调查和污染分布的立体化监测提供了有效解决方案。
Abstract:
In recent years, the demand for water quality detection based three-dimensional space layered for large water areas such as rivers, lakes and reservoirs, as well as water surface and underwater, upstream and downstream/left and right banks, has increased significantly. Different from the technical route of remote operated underwater vehicle (ROV), the paper proposes a design pattern of water quality detection system based three-dimensional space layered for large water areas by autonomous underwater vehicle (AUV), this water quality detection system, for short: WGD-AUV system. By AUV with multiple parameter (5~12/kinds) water quality sensors, AUV according to the preset electronic map path planning, autonomous avoidance collision and obstacle, long-endurance, and shore-based instrument to work together, to achieve three-dimensional space layered detection of water quality in the whole measurement domain, and point-test data check and whole-field data test compilation. The design pattern of new WG-AUV system proposed in this paper provides an effective solution for the investigation of water quality differentiation and three-dimensional monitoring of pollution distribution in large water areas of our country.
1. 引言
随着我国社会经济的持续高速发展和不断加剧的人类活动,江河湖库、河口与海岸带、渔业与水产养殖区、饮用水水源地等水质劣化的同时,表层与水下水质也呈显著的时空分异性,尤其大水域水体水质随地理区域、上下游、垂向深度等变化明显,如,入湖入库入海河口区与左右岸污染分布、城市水源地库区水体表层与底泥上覆水体重金属污染分布、渔业与养殖水域富营养化垂向分布等空间异质性等。近年来,水质分异性调查与全域性三维空间(水深及经纬度)分层的立体化检测的重要性显著增长 [1] [2] [3] [4]。然而,现有的水质点/面检测技术手段无法满足这种受测水体分异性格局的全覆盖在线监测应用需求。为此,本文提出一种基于自主水下机器人(AUV)的大水域水质三维空间分层检测系统(a water quality detection system based three-dimensional space layered for large water areas by autonomous underwater vehicle,简称:WG-AUV检测系统)设计模式。后续的内容组织安排:首先介绍对于水下机器人水质检测仪器设备总体设计任务的分析,以及需要突破的关键技术,然后分析和介绍WG-AUV检测系统的组成、野外施测作业方式、系统的主要功能模块等。
2. WG-AUV检测系统总体设计任务分析以及需要突破的关键技术
表1给出了目前国内外水下机器人水质检测仪器设备关键技术及其在环境、水利、水生态、渔业/水产养殖、近海与海岸带等领域的应用情况 [3] [5] - [12]。

Table 1. Review on key technologies and applications of water quality detection equipment based AUV at home and abroad
表1. 国内外水下机器人水质检测仪器设备关键技术和应用综述
分析表1可看出,目前我国水下机器人研发成果到行业领域应用面临断层,尤其在水下机器人及搭载高性能水质传感器水下测量作业领域,应用于环境、水利、水生态、渔业/水产养殖等水质分异性调查与全域性三维空间分层检测方面的高科技技术和产品市场长期被国外公司垄断 [3] [4] [5] [6] [7]。国内尚无适宜的水下移动水质检测仪器设备,需依赖于国外进口,但价格昂贵,也“水土不服”于我国的水环境情势,且检测作业运维和设备维修成本过高。如水利部门在大水域监测应用中,目前多使用的仪器设备是进口美国YSI公司的EcoMapper AUV全自动水下生态层析仪,该仪器搭载YSI6系列水质检测仪,可同时监测17个参数 [3] [11]。而国内的相关仪器设备仅局限于企业网站的介绍,未见有实际应用的报道 [5] [6] [7] [8] [11] [12]。
WG-AUV检测系统总体设计任务所满足的应用需求,应以我国的江河湖库、河口与海岸带、水产养殖区、饮用水水源地等水环境保护和水污染防治为应用背景,以实现主要技术指标达到或部分优于国外同类先进水平为目标,需要突破的关键技术包括 [3] [12] - [18]:
1) AUV整机系统和组合导航与定位关键技术。自主水下机器人AUV (或称自治式无缆水下机器人)整机系统和组合导航与定位,应能满足长航程大水域水质分异性调查与全域性三维空间分层的立体化检测、复杂或未知地形环境下避碰、水产养殖区等特殊水域避障、水工构筑物水域复杂急速水流条件下动力定位等应用条件。考虑到有缆遥控水下机器人(ROV)受电缆长度限制、施测作业区域小,为此采用AUV的设计路线。
2) 一体化多参数水质传感–移动测量误差控制关键技术。通过多型式组合水质传感器与光纤式水质传感器同步采集和点测数据的三维标注,一体化多参数水质传感–移动测量误差控制,应能增强水下移动检测的复杂环境下采集水质数据的可信性和可靠性。
3) AUV与岸基仪器全域检测过程在线协同关键技术。江河湖库、河口与海岸带、水产养殖区、饮用水水源地等水体中组份复杂、水质空间分布受气候、雨量、流速流向等的变化影响很大,且在水质传感器移动检测时受到外界干扰时可能产生的粗大误差影响,加之,水下移动检测、AUV定位及与水质传感数据间强耦合关联等,AUV与岸基仪器全域检测过程协同,必须依据水体水质各成分的相互关系和分布规律对采集的点数据做技术性核查,以使岸基仪器整编形成合理可信和规范的全域测验成果 [2] [3] [15] [16] [17]。
在突破上述关键技术基础上,进一步提出基于预置电子地图的AUV路径规划,自主避碰–避障和长航时航行、动力定位、失联(AUV“跑丢”)预警,以及AUV-岸基仪器全测量域检测过程协同等关键技术解决方案。在系统功能上具有:① 机载水质检测仪满足水下移动条件下多参数(5~12种/类)水质传感且重量轻–电耗低–移动测量精度稳定;② AUV定位与传感器量测数据三维(水深及经纬度)同步的一致性标注;③ AUV与岸基仪器全域在线检测过程的协同工作;④ 点测数据校核与全域测验数据的现场整编。
3. WG-AUV检测系统组成和野外施测作业方式
3.1. WG-AUV检测系统组成
WG-AUV检测系统由AUV、机载水质检测仪和岸基仪器组成,供电电源由停泊在施测作业现场的越野汽车上蓄电池DC-AC电源系统供给。施测作业过程中AUV周期性上浮水面,通过无线链路与岸基仪器中的AUV测控主机通信。岸基仪器的核心组成采用6槽加固型便携式计算机,AUV测控主机板卡及接口板卡可插入其内,AUV测控主机板卡基于可编程片上系统(SOPC)设计。系统组成框图示意于图1。
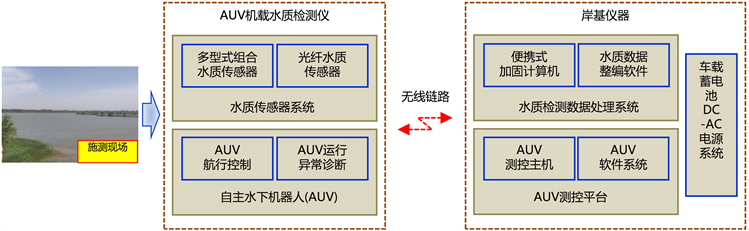
Figure 1. The composition of WG-AUV system
图1. WG-AUV检测系统的组成
3.2. 野外施测作业方式
自主水下机器人AUV按照预置电子地图航行路线、深度和停靠位置,自主避碰–避障行驶,并在行进中自动定位和测量预设各分断面位置的水质,通过即时水深定位和周期性(间隙时段)浮出水面接收北斗BDS (或GPS)信号,经专用无线遥测通信以“召测/自报”方式批数据传输至岸基仪器。完成巡检任务后,根据系统路径规划设置,自动回到预设的停靠位置。施测作业过程中,岸基仪器适时召测是否收到AUV回答信号并作出失联预警,以防止AUV“跑丢”而造成财产损失。岸基的便携式加固计算机完成水质数据收集、校核及数据的三维空间层析化整编,并自动绘制全测量域3D水质分布图。
4. WG-AUV检测系统的主要功能模块
4.1. AUV整机系统、组合导航与定位
4.1.1. AUV整机系统总体设计
AUV整机系统总体设计参数如下 [3] [18] [19] [20]。
① AUV载体:近流线体,尺寸:160~180 cm × Φ20~30 cm,空气中重量:≯70 Kg;② 载体主体外壳材质:碳纤维、海洋级铝合金等,成型加工;③ AUV最大工作深度:0~100 m;④ 续航力:水下最大航速3.0节(Knots),连续工作可达6~8小时;⑤ 动力:车载用的高容量锂离子(Li-Ion)电池组(安装位于AUV后部);⑥ 系统设计直流无刷电机带动横向、竖向和纵向的万向三叶螺旋桨,提供横移、转艏、升沉、纵倾、横倾推进动力;⑦ 设置艏部舱、艉部舱、传感器舱、控制系统舱、主机电路舱和能源动力舱等,各舱独立分隔封闭;⑧ 设置气囊上浮装置,紧急情况时激活点火器引发气囊迅速膨胀并弹开气囊盖,借助气囊AUV自动快速上浮。
4.1.2. AUV组合导航与定位
构建以高精度光纤捷联惯性导航系统(FSINS)水下自主导航为主,多普勒速度仪(DVL)、电子潜水罗盘(EC)、压力式深度计(PDG)为辅的组合导航系统,同时,AUV按照一定周期/航程间歇性浮出水面、利用北斗卫星导航系统BDS/全球定位系统GPS进行航迹修正 [12] [13] [19] [20]。
高精度光纤捷联惯性导航系统(FSINS)是目前机械陀螺平台式惯性系统的升级换代产品。但在水下自主导航应用中,必须解决航程远、长时、高稳定性条件下的FSINS高性能指标。依据AUV导航参数与误差模型、水下惯量推测航迹修正处理算法,通过AUV上浮水面接受BDS/GPS定位校准FSINS,并基于采集的DVL、EC(使用磁阻传感器和两轴倾斜传感器来提供航向信息)及压力式深度计测量值,建立FSINS静基座初始对准和动基座初始对准跟踪真实导航坐标系,基于“一主多子滤波器”联邦Kalman滤波算法,实现对FSINS的系统标定,以及初始对准和系统误差控制。FSINS设计参数:深度范围:150 m;俯仰角(pitch)/翻滚角(roll)精度:±0.2˚;航向(heading)精度:±0.3˚;位置精度:0.5%;深度精度:满刻度的1%。
4.2. AUV机载水质检测仪
AUV机载水质检测仪由常规多型式组合水质传感器(5~12种/类组合)和一体化光纤式水质传感器两部分组成,通过多型式组合水质传感器与光纤式水质传感器同步采集,以保障水质数据每一次采集的可信性和可靠性 [2] [15] [16]。
4.2.1. AUV机载多型式组合水质传感器
AUV机载的常规型电极式/荧光法/光纤式多参数水质传感器具有小型化集成化特点,组合集成四电极电导率、荧光法溶解氧、光纤式浊度、数字pH电极、蓝绿藻及叶绿素传感器探头、ORP (氧化还原电位)及水中油传感器探头等(可选装配)。小型化集成化的组合设计能够实现自由组合安装5~12个水质传感器,检测因子包括:温度、pH、ORP、电导率、盐度、溶解氧、浊度、叶绿素a、蓝绿藻、若丹明、水中油、氨氮等。设计配备自动清洁装置,采用基于磁致伸缩换能的超声波自清洁技术,避免污染物或微生物附着于探头表面影响检测精度。传感器清洗频次:推荐6个月/次(根据使用环境而定),传感器校准频次:推荐6个月/次(根据使用环境而定)。水质传感器检测原理可根据用户要求选用,温度、pH、氧化还原电位ORP等可选用铂电阻法、玻璃电极法、石墨电极法检测;溶解氧可选用极谱法/荧光法检测;浊度:光纤式检测;叶绿素a、蓝绿藻、若丹明、水中油:荧光法检测;氨氮:离子选择电极法检测;化学需氧量COD:紫外吸收法检测。
4.2.2. AUV机载的一体化光纤式水质传感器
AUV机载一体化光纤式水质传感器采用基于波分复用的光纤衰荡腔传感阵列设计,可对水质参数(水温、浊度、蓝绿藻、叶绿素a、溶解氧、PH、ORP等)与常规多型式组合水质传感器进行同步检测。波分复用技术通过降低水质传感器的能耗和重量,能够满足水下机器人搭载载荷的应用需要。一体化光纤式水质传感器采用四通结构设计,由钛合金材料(TC4)加工而成;传感器的横向两端连接入射光纤和出射光纤,作为传感器的传感区域,光纤与传感器之间接有光纤准直透镜;传感器的纵向区域允许水样自由流动,两端均有一个中空的螺帽结构,用于固定滤网,防止水体中体积过大的悬浮物质对测量造成干扰。
4.3. 岸基仪器
4.3.1. AUV与岸基仪器的无线遥测数据传输
采用符合国际电联移动通信标准(3GPP TS36.300)的TD-LTE物理层架构,构建专用的无线遥测数据传输系统。系统工作中心频率为2.5 GHz (与商用蜂窝LTE系统间不产生干扰),岸基仪器与AUV的上传数据通路和下行控制信令最大传输速率为10 Mbit/s,通信距离:≮20 Km。采用TDD双工模式,MIMO (多入多出)天线阵工作模式配置2 × 2或4 × 4空时发射分集或空间复接方案,天线阵采用单频微带偶极子全向辐射阵元构成。
4.3.2. 水质检测数据处理应用软件系统
在加固型便携式计算机上装载“水质检测数据处理应用软件系统”,主要包括“水质数据校核”、“检测全过程协同控制”和“水质数据整编”三大模块。“水质数据校核”、“检测全过程协同控制”功能设置:① AUV与水质点测的水深及经纬度三维一致性即时标注;② 关联AUV定位及地图构建;③ 水下环境扰动下点测数据粗大误差的适时核查;④ 基于领域知识规则的全测量域水质数据分布修正;⑤ 基于预设置的路径规划任务对于AUV航行偏离的纠正;⑥ AUV-岸基仪器的全域在线检测过程协同工作流程的组织。AUV-岸基仪器的全域在线检测过程协同工作流程的组织是面向任务的一种组织方式,采用基于全局系统策略的模型–视图–控制器(Model-View-Controller)结构开发。“水质数据整编”软件模块,取代原有的人工校核整编,支持实现各断面点测数据校核和水体水质层析化数据的现场整编功能,自动绘制全域3D水质分布图。
5. 结论
面向“十四五”我国环境/水利测量仪器设备技术产业从中低端向国际业界中高端水平攀升的重大现实需求,以及我国水环境情势,提出了一种基于自主水下机器人的大水域水质三维空间分层检测系统(WG-AUV系统)设计模式,该设计模式通过完全自主可控的创新技术路线,突破了国外高技术壁垒,为我国大水域水质分异性调查和污染分布的立体化检测提供了新型技术手段和有效解决方案。本文提出的WG-AUV检测系统设计模式具有四方面的优点:1) 有别于有缆遥控水下机器人ROV施测区域受电缆长度限制,采用自主水下机器人AUV搭载水质检测仪的设计路线,AUV续航力设计指标:水下最大航速3.0节,连续工作可达6~8小时,支持实现了长距离大范围的野外施测作业。2) 针对AUV长航程大水域、复杂或未知地形环境下避碰、水产养殖区等特殊水域避障、水工构筑物水域复杂急速水流条件下动力定位等施测作业条件,并参照当前国际业界领先的EcoMapper全自动水下生态层析仪(美国YSI公司产品)相关技术指标,提出了AUV整机系统总体设计方案、及组合导航与定位方法。3) 与国外产品的水质检测方案不同,通过双冗余水质传感方案设计,提出了AUV机载的常规多型式组合水质传感器与一体化光纤式水质传感器同步采集和点测数据三维标注方法,增强了水下移动采集水质数据的可信性和可靠性。4)针对我国江河湖库等大水域水体组份复杂、水质分布受气候、雨量、流速流向等变化影响大,以及AUV水下移动检测过程的复杂性,设计了基于“水质数据校核”、“检测全过程协同控制”和“水质数据整编”三大模块,构建了岸基仪器水质检测数据处理应用软件系统架构,支撑实现了各断面水质点测数据校核和全测量域3D层析化数据的现场整编功能。相比较,俄罗斯Indel-Partner、美国Ocean Server、美国YSI公司的相关产品不具备现场功能,需要带回到实验室做数据整编处理。
基金项目
本文得到江西省教育厅科学技术研究项目(项目编号:GJJ212105,GJJ212104)的资助。