1. 引言
海底底质是海洋生态系统的重要组成部分,海底底质特征在海洋地质、海洋工程、海洋环境科学、海道测量及海洋资源开发利用中发挥着重要作用 [1] 。
传统的海底底质调查监测手段主要是通过机械钻孔等手段直接取得海底沉积物的样品进行分析鉴别 [2] 。这种方法可以较为直观准确的得到底质信息,但比较耗时,成本较高,而且往往只能获得研究区域内的离散数据。
目前,海底底质调查监测手段正逐渐由直接取样转变为非接触性的探测方法 [2] ,以声学和光学遥感最具代表性。随着激光雷达测深技术的发展,以机载激光雷达为代表的主动光学遥感,正被广泛运用于海底底质分类相关研究。
机载激光雷达测深(Airborne Lidar Bathymetry, ALB)是一种利用扫描脉冲激光从空中进行水底探测的主动遥感技术 [3] 。它具有精度高、覆盖面广、测点密度高、测量周期短、低消耗、易管理、高机动性等特点 [4] 。机载激光雷达测深系统能够在1~50米的垂直范围内提供精确的数字深度模型(Digital Depth Model, DDM),所测量的最大深度基本上取决于水的浊度。与被动遥感相比,机载激光雷达测深系统可以穿透多达3Secchi,并且能测量到达60米的深度 [5] ,是一种非常适合浅海地区测绘的技术。
机载激光雷达测深技术从20世纪60年代末开始发展,由Hickman等初步建立了激光雷达测深技术的理论基础 [6] ,随着国内外对机载激光雷达测深研究的不断深入,Guenther等指出影响激光雷达测深精度的关键在于激光测深波形数据处理 [5] 。目前,测深波形数据处理主要围绕波形提取与分解、折射改正、误差控制以及航带拼接与融合等方面展开了大量研究。
机载激光雷达测深波形提取与分解根据不同方法原理可分为3类,分别是回波检测法、去卷积法和数学模拟法 [7] 。回波检测法侧重于检测目标的位置,但没有特别考虑波形振幅特征。去卷积法将接收波形看作是激光发射脉冲与目标横截面之间的卷积,这种方法需要多次迭代,效率不高,并且受水质影响较大。数学模拟法又称波形分解法,这类方法使用数学函数的组合来拟合波形,能获取除水深的衍生信息,但参数较多,求解复杂。
目前在折射改正相关研究中,主要聚焦在波动海面瞬时法向量上,同时也在对海面仿真进行研究。构建海面模型的方法主要有的正弦波模型、叠加的随机余弦波模型、快速傅里叶(IFFT)变化,这些模式构建的是海浪的在空间中波形随时间变化关系等,另外,海面模型所需要的海浪参数通常由海浪频谱计算得到。
误差控制主要从系统误差、测深过程误差、波浪潮汐水位计算等方面入手,Steinvall等通过对测深数据分析确定了系统的性能,通过优化测深参数方法,获得了高精度的水下地形数据 [8] ;国内如叶松修等通过分析影响激光雷达测深精度的因素,对误差源进行了定性定量分析,并建立了激光测深异常观测值检测模型 [9] 。
航带拼接主要通过航带间同名点计算转换参数及标准差达到效果,常用的方法有三维正态分布法(3D-NDT法) [10] 、迭代最近点法(ICP法) [11] 等。
在对机载激光雷达测深技术进行长期探索后,已出现了许多较为成熟的机载激光雷达测深系统产品,比较著名的有Optech公司的CZMIL、Aquarius、Titan,Leica公司的HawkEye、Chiroptera,Fugro公司的LADS、RIEGL公司的VQ-820G、VQ-880G、NASA的EAARL系统等 [12] ,这些系统已在河流海岸带水深测量、水底分类及制图、珊瑚礁的监测、水下考古、水面油污的监测和水下鱼群的监测等多个领域展开了应用 [13] 。我国自上世纪80年代开始也积极开展机载激光雷达测深系统的研制,如华中科技大学、中国科学院上海光机所等单位均对机载激光测深系统进行了理论研究与系统开发工作,获得了一批有价值的实验成果,但尚未实现产业化应用。
本文介绍了机载激光雷达测深技术的原理,并系统的回顾了国内外机载激光雷达测深技术在海底底质分类上的数据处理及应用的研究进展,探讨了未来的发展方向。
2. 机载激光雷达测深原理
2.1. 激光雷达测深原理
激光是一种具有高度单色性,良好方向性和相干性的彩色光源。安装在飞机上的机载激光雷达测深系统以一定的入射角和扫描方式向水面发射激光脉冲,精确探测水面反射回波和水底反射回波的时间,结合激光传播速度、水的折射率、飞机的位置和姿态、激光束指向信息等,计算水底三维位置坐标及水深 [7] 。机载激光雷达测深原理如图1所示。
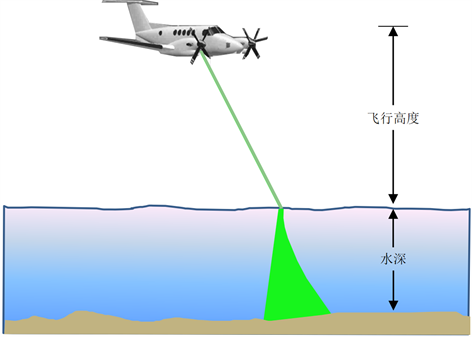
Figure 1. Schematic diagram of Airborne LiDAR Bathymetry principle
图1. 机载激光雷达测深原理图
比较常见的机载激光雷达测深系统为双色激光雷达测深系统,其使用两种激光器:波长为1064 nm的红外激光和波长为532 nm的蓝绿激光,这两束激光具有高功率、窄脉冲的特点。波长为1064 nm的红外激光在海水中的穿透率非常低,所以在达到空气与海水的分界面时,会经历散射和反射,延入射路径返回后被光学接收系统接收,而海水中存在着蓝绿激光的穿透窗口,因而测深系统发射的波长为532 nm的蓝绿激光在海水中衰减系数最小,进入水体和返回接收系统之间的能量损失也最小,蓝绿激光可以穿透海面,到达海底并延入射路径返回,并被光学接收系统接收,然后根据两个激光束记录的间隔差来确定水深 [14] 。机载激光雷达测深水深地形剖面图如图2所示。
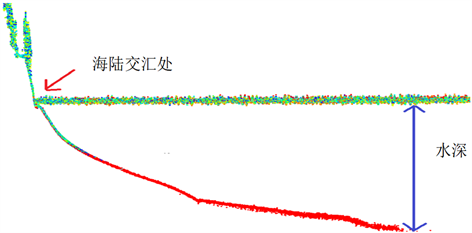
Figure 2. Airborne lidar bathymetry topographic survey
图2. 机载激光雷达测深水深地形坡面图
除双色激光雷达测深系统外,也有一部分仅采用波长为532 nm的蓝绿激光作为激光发射器光源的单色机载激光雷达测深系统,这种系统结构比双色系统简单,同时还可以避免时间同步误差,是机载激光雷达测深系统的另一个发展趋势。
2.2. 激光雷达波形
机载激光雷达测深系统主要为全回波系统(full waveform system) [15] ,相对于离散激光雷达系统,全波形激光雷达系统能够提供更多的目标信息,单次激光脉冲可获取一个激光脚点内的复杂地物目标的回波形态,包括脉冲时间、幅度、脉宽及多回波分布等综合信息记录的信息,并在之后加以分析运用。是和时间相关的激光回波信号。回波波形如图3所示。
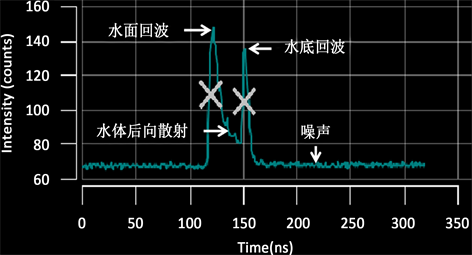
Figure 3. Airborne Lidar Bathymetry waveform
图3. 机载激光雷达测深波形图
机载激光雷达回波波形是水面回波信号、水体后向散射信号、水底部回波信号、背景噪声等能量、传感器内部噪声的总和,即系统接收的回波信号,可以认为是五部分回波信号在时间轴上能量的叠加,可由公式(1)进行表达 [16] 。
(1)
其中,
为机载激光雷达测深系统接收的总回波信号,
是水面回波信号;
是水体回波信号;
是水底底质回波信号;
是背景噪声;
是设备内部噪声。
3. 底质分类方法研究进展
自20世纪80年代中期机载激光雷达技术逐渐成熟以来,机载激光测深雷达数据最常见的应用是生成海底的数字高程模型(Digital Elevation Model, DEM),从DEM中可以计算各种深度衍生数据 [17] 。而随着世界各国对海洋进行空间规划的需求不断增加,对底质分类的研究也在不断增加,通过对激光雷达测深系统的返回信息反演来提取水体和海底特征 [18] 被越来越多的应用于底质分类当中。
在底质分类应用中,主要的分类方式分为两类:基于机载激光雷达测深系统获取的数据的底质分类以及多源数据融合的底质分类。
3.1. 基于机载激光雷达测深数据的底质分类
3.1.1. 基于波形的底质分类
尽管测深激光在传播过程中受到大气、海水表面、水体以及海底若干变量的影响,测深波形中的底部回波仍可以反映底质信息 [7] ,因此波形是区分不同海底底质信息的有用指标。在被激光扫描的环境中,每个物体都能以特定方式反射激光,因此在返回信号中会产生每个物体相应的特征信号,从而提供了关于目标结构和物理属性的附加信息,进而被应用于底质分类过程中 [19] 。
Tuldahl等 [20] 在波罗的海区域,首先基于机载激光雷达测深系统Hawk Eye II获得的波形宽度以及波峰差值进行分类,证明采用机载激光雷达测深波形数据的底质分类是有效的。在后续的实验中,通过对激光测深数据矫正,提取了波形底部脉冲宽度及波形面积特征参数,将海底分为硬基底、高植被软基底和低植被软基底三部分,结果证明,与仅使用水深导出的特征参数(坡度和水深标准偏差)相比,采用波形特征参数(底部脉冲宽度和面积)进行底质分类的精度达到了80%以上,显著提高了分类精度 [21] 。
Collin等于加拿大圣劳伦斯湾,使用基于机载激光雷达测深系统SHOALS从测深波形数据中提取了10个量化的特征参数,证明无论是原始波形还是五次高斯(Quintic Gaussian, QG)拟合后的波形数据都能显著区分底质类型。同年,Collin等从测深波形数据中提取了12个量化的特征参数,如偏度、峰值、水面和底质峰值的差值等,以实地采集到的影像信息作为参考,采用监督分类方法(最大似然法)进行底质分类,其精度达78.6%。同时还结合SHOALS系统发射的用以记录水体的拉曼散射信号,构建了植被指数,使最后水下植被的分类精度达到95.2%。
Eren等于美国缅因湾,提出了一种算法处理机载激光雷达测深系统SHOALS获得的波形数据,获得了一种新的特征参数:模型残差信号与实验残差信号之间的相似度。并基于该特征参数进行监督分类,结果表明,该激光测深波形数据与海底底质之间具有良好的相关性 [22] 。并在另一项实验中,Eren等对测深波形中的底部波形进行残差分析,获得了新的特征参数,而后使用支持向量机对底质进行分类,最终砂石分类精度达96%,粗细砂的分类精度达86% [18] 。
Wilson等开发了用于生成海底相对反射率的新算法和程序,并结合EAARL-B测深系统中获得的波形特征参数对珊瑚进行了分类,研究发现,虽然相对反射率与底部回波面积之间具有强相关性未参与处理,不同珊瑚的形态特征与波形特征之间存在一定的相关性,可以将波形特征参数作为珊瑚分类的依据 [23] 。
Kumpumäki等通过HawkEye II激光测深系统获取了底部回波波形,采用自组织映射网络SOM方法对底部回波进行聚类分析,发现7个波形聚类与底质类型之间具有高度对应性,表明了波形特征可以用来描述海底底质类型[17]。
Amani等通过机载激光雷达测深系统获取了强度信息,即波形的振幅值,使用随机森林算法,区分了植被与非植被的底质类型,精度达87% [24] 。
通过文献收集整理,于表1中总结了基于机载激光雷达测深波形数据的底质分类中较为常见的波形特征参数,分别为:振幅、波宽、半幅波宽、回波面积、标准差、平均值、中位数、偏态、峰度。
3.1.2. 基于测深衍生数据的底质分类
机载激光雷达测深系统除了可以获得全波形数据外,还能基于机载激光雷达测深系统得到水深衍生数据,如海底地形和结构(坡度、粗糙度、坡向和水深)等。这些信息可以作为描述海底生物(例如藻类、海草、无脊椎动物)和其他底质空间结构的重要参考 [26] 。
基于机载测深激光雷达水深衍生数据的底质分类通常与测深波形相结合来提高分类精度。如Collin等 [27] 使用了SHOALS测深系统提取到的圣劳伦斯湾波形数据提取了12个底部波形特征参数,然后结合基于11个纹理特征参数计算的局部空间统计,应用支持向量机对四种底质进行分类,获得了高达93.3%的总体分类准确率。同年,Collin等人 [28] 采用同样的机载激光测深雷达数据,提取了16个波形特征参数以及12个水深衍生特征参数,并测试了不同的机器学习分类方法。实验发现,使用随机森林方法对平均水深、时间范围和底部波形的偏度三种特征参数进行底质分类的效果最好,精度为69%。
Kogut等利用AHAB Chiroptera激光在德国波罗的海区域采集的测深数据,提取了包括底部波形特征、水深衍生特征在内的16个特征参数,以随机森林方法对水面、水底以及底质物体进行分类。其中,对水面以及海底的分类精度达100%/99.9%,对底质物体检测精度有60% [29] 。
Su等人提取了Optech Aquarius机载测深数据中6个波形特征参数以及6个水深衍生参数,使用支持向量机分类器,对西沙海底底质进行分类(珊瑚礁和其他底质)。结果表明,融合底部波形特征参数与水深特征参数的分类精度比单独二者的分类精度要高,珊瑚礁的分类精度从80.59%/90.31%提高了93.57% [30] 。
Coliin与Letard等通过ALB提取了使用法国科西嘉岛水域的强度信息、波形信息以及地形信息,并将返回的强度与激光脉冲发射强度做比值获得了相对反射率数据,然后与从波形数据中提取的特征参数以及水深参数结合,通过最大似然分类法将海草的分布和范围的精度提高到了86% [31] 。
使用机载激光雷达测深系统进行的包含底质分类的海陆一体生境分类也逐渐成为热点,Letard等在法国多个沿海地区结合机载激光测深系统HawkEye 4X获取的波形数据、高程数据以及红外波段的强度数据,对包括底质信息在内的沿海21个生境进行了分类,获得了约90%的精度,证明当机载测深多种数据融合分类时,可以获得最佳结果 [19] 。
由于机载激光雷达测深系统的核心技术保密性较强,用户通常无法直接获取波形数据,同时由系统配套软件生成的波形数据通常为其自有格式,读取和处理都存在问题,常常只能获得点云数据。Zavalas [32] 和Sun [33] 的研究证明,仅基于水深衍生数据进行底质分类也是可行的。
Zavalas [32] 等人使用LADS Mk II测深系统采集了水深衍生数据:数字高程模型(DEM),并导出了六个特征参数,结合三个基于反射率的特征参数,生成了澳大利亚维多利亚州西部海域的底质、生物和植被冠层结构的专题图,总体分类精度约70%。
Sun [33] 等仅基于SHOALS系统获得的测深衍生数据DEM进行底质分类,也取得了不错的效果。其通过使用灰度矩阵对DEM图像进行纹理分析,提取了六个特征参数,而后采用K-Means聚类与支持向量机结合的方法对四种底质(沙、泥、泥沙、岩石)进行了分类,总体准确率达85.39%。
通过文献收集整理,于表2中总结了基于机载激光雷达测深水深衍生数据的底质分类中较为常见的水深衍生特征参数,分别为:水深位置指标、坡度、坡向、粗糙度、曲率。

Table 2. LiDAR bathymetry derived data feature
表2. 激光雷达测深数据特征
3.2. 多源信息融合的底质分类
单一的遥感手段并非适合所有的遥感应用 [39] ,合理的组合观测方式可以提高遥感定量观测的精度。将卫星遥感等被动遥感手段与机载激光雷达测深系统共同使用来提高分类精度,是底质分类中常见的方法。Tuell等早期 [40] [41] 工作表明,通过对机载测深激光雷达波形分析,可以对海底反射率和水体的光学特性进行模拟,为机载测深激光雷达和高光谱数据的融合,例如海底植被的分类提供可能。
Tulldahl等人 [42] 融合WorldView-2高分辨率卫星影像获得的反射率特征参数和HawkEye II机载测深激光雷达获得的深度衍生特征参数以及波形特征参数,通过最大似然法以及随机森林方法用于海底底质的分类。实验表明,当使用机载测深特征参数和卫星影像特征参数的组合时,总体准确度提高到约80%比单独分类要提高20%~30%。
Madronero等结合了激光雷达测深数据与高光谱图像,对底质生境进行绘图。结果表明,与预期的仅使用高光谱图像相比,融合激光测深数据可以显著提高反演算法的能力,以更好地解析海底底质类别 [43] 。
Zhang等结合Ikonos卫星获取的影像数据与Riegl VQ880G测深系统获得的DEM、DSM、以及强度数据对美国佛罗里达群岛海域的珊瑚礁进行分类,得到的结果比仅使用Ikonos卫星影像或仅使用Riegl VQ880G系统的测深衍生数据分类精度要高,达93% [44] 。Jalali等将来机载激光雷达测深系统获得的水深衍生数据以及卫星图像得到的海水表面温度相结合,模拟了鲍鱼和海胆丰度数据的空间变化 [45] 。
除卫星影像数据外,还可机载激光雷达测深系统还可与声学等主动遥感手段以及结合海洋相关参数对底质进行分类。Wang等从机载测深系统中提取了8个底部波形特征参数,并基于MBES后向散射图像生成了8个特征参数,将二者结合基于支持向量算法对中国南海远志岛的底质(砂、岩石、珊瑚礁)进行了分类。结果表明,融合LiDAR和MBES多特征后的分类精度最好,高达96.71% [46] 。Smith等将机载激光雷达测深系统中提取到的水深衍生数据(水深、坡度、坡向、粗糙度、曲率)与水动力学参数(例如,流速和波高)结合对六种不同的底栖生境进行了分类,总体精度达97.6% [36] 。
4. 存在问题
1) 机载激光雷达测深系统在底质分类过程中使用的是单波长数据,获取的光谱信息少,降低了底质分类的能力。
2) 机载激光雷达测深系统在数据采集时会受到系统内部和环境的干扰,影响其精度。激光束在水体中传播会受到海水透明度的限制,波浪影响以及底质复杂的结构也会导致回波信息的变形进而影响底质分类精度。
3) 目前海陆一体的生境分类以及地形测量发展的越来越快,使用机载激光雷达测深系统也逐渐成为热点,但是对于极浅水域,波形的水面回波和底部回波存在重叠,不易处理。
4) 波形数据与水深衍生数据之间可能存在相关性,在底质分类的研究中,对这些特征参数的相关性研究并不多,并且不同底质波形特征的物理意义探讨较少。
5. 展望
针对第4小节存在的问题,本节提出了相应的解决方案并进行展望。
1) 为了提高机载激光雷达测深技术在底质分类过程中的精度,可以采用多源数据(激光测深数据、遥感影像数据、声学测深数据等)融合的方式进行分类。许多公司正在研发集多种遥感传感器于一体的设备,如Optech公司的CZMIL系统集成了测深激光雷达、高光谱成像仪、数字相机等遥感传感器,可在一次飞行作业的过程中同步获取多种数据,进而生成沿海区域相关产品。
2) 在机载激光雷达测深数据质量控制上,可以开展对复杂地形环境以及浑浊度较高的水体水深处理研究工作,降低水体浑浊度对激光脉冲的影响。
3) 为了实现基于机载激光雷达测深技术的海陆一体无缝模型建立,针对极浅水域的波形分解十分重要,需要对水面及水底回波的混叠波形开展波形分解研究,建立合适的波形模型。
4) 为了了解激光脉冲波形与水深衍生数据之间的相关性,可以开展地面真实性验证来完善这些结果。
5) 由于机载激光雷达测深系统往往保密程度较高,其数据往往只能基于特定软件进行处理,因此对全流程的机载激光雷达测深数据处理软件研发也十分重要。
6. 结论
本文针对当前机载激光雷达测深技术在海底底质分类方面的研究进行了概括总结。从基于机载激光雷达测深数据的底质分类以及机载激光雷达测深数据与多源信息融合的底质分类入手,对目前使用机载激光雷达测深技术进行底质分类的现状以及面临的问题进行了归纳以及展望。作为新型的海底底质分类技术,机载激光雷达测深技术还需要突破当前其系统精度、数据处理等多方面的技术难题,如对高精度、实用化的硬件研发以及对激光回波数据采用更精确的拟合、改正方法等。相信随着测深技术的不断发展,我国对沿海区域的水深测量能力会不断提高,基于机载激光雷达测深技术的底质分类也会有更好的应用前景。
基金项目
本文由中国地质调查局项目资助(编号:DD20230406)。