摘要: 由于地面植被之间的遮挡,导致利用现代测绘技术实施对地形数据测量时,往往存在测量死角,导致最终结果的准确性较低,为此,提出基于无人机摄影的地形数据测量方法研究。以目标区域中心为基础,利用无人机分别在30˚,60˚以及90˚的高度上进行360˚影像数据采集,并结合地形表面对无人机的飞行速度进行适应性调节,通过这样的方式获取完整影像数据后,在不同维度的数据进行拟合,得到测试区域的三维模型,利用中心点的坐标信息,对模型内任意位置具体参数进行赋值,实现对不同地形数据的测量。测试结果表明,设计方法的测量结果与实际地形数据之间的误差稳定在2.00 cm以内,具有较高可靠性。
Abstract:
Due to the occlusion between vegetation on the ground, when using modern surveying and mapping technology to measure terrain data, there are often measurement dead angles, resulting in low accuracy of the final results. Therefore, a research on terrain data measurement method based on drone photography is proposed. Based on the center of the target area, the UAV is used to collect 360˚ image data at altitudes of 30˚, 60˚, and 90˚, and the flight speed of the UAV is adaptively adjusted based on the terrain surface. After obtaining complete image data in this way, the 3D model of the test area is obtained by fitting the data in different dimensions, using the coordinate information of the center point, assign specific parameters at any location within the model to achieve measurement of different terrain data. The test results show that the error between the measurement results of the design method and the actual terrain data is stable within 2.00 cm, with high reliability.
1. 引言
在建立国土资源数据库的过程中,不仅要充分考虑土地的基础数据,同时也要确保对应地理空间数据与实际地籍信息保持高度一致 [1] [2] 。在此背景下,以地籍信息测量为目标的相关研究开始受到越来越多的关注。其中,文献 [3] 将倾斜实景模型与LiDAR点云数据进行有机融合,实现对不动产地籍数据的测量,测量结果较高的效率,但是其精度受点云数据可靠性影响较为明显,对应的数据误差难以得到稳定控制。由上述文献可知,传统的测绘技术已经难以满足现代工程的测绘要求,如果对测绘技术进行创新,提高其可靠性成为了世界各国科研人员共同关注的热点问题。
随着科学技术的发展,无人机由于其灵活性、机动性和快速响应能力,在遥感领域引起了越来越多的关注。根据不同的飞行平台,无人机可分为飞艇、无人机降落伞翼、固定翼无人机、无人机机翼变种、无人机机翼和无人机翼。无人机一经问世就被广泛用于各个科研领域。1917年,世界上第一架无人机在英国成功开发,并率先再第一次世界大战中发挥了重要作用。随着微电子、通信技术、材料、电力系统的快速发展,无人机技术的应用领域从传统的军事领域慢慢转向非战争领域。在欧洲,无人机遥感技术率先被用于海洋监测、森林火灾监测和地球磁场,而当前应用最为广泛的是地形测绘领域。由于地面的情况非常复杂,导致使用传统测绘手段进行测绘时会存在测量死角与较大误差,这将对科研与工程的实施造成较大困难。无人机因体积较小,行动灵活等优势天然适合航拍以此测绘地形。本文基于测绘中心,利用无人机的高机动性在与地面呈30˚,60˚以及90˚的夹角进行数据采集,并结合地表在线调节无人机的飞行速度与高度,得到完整影像数据后,再利用软件对不同维数据进行拟合从而得出近似模型,再利用相关坐标信息对模型未知数进行赋值,从而得到实际的位置信息。由单一变量法则进行实验,实验结果与实际地形数据之间的误差被控制在2厘米以内,符合当前地形测量的标准,具有较高可靠性。
2. 无人机测绘技术的运用
2.1. 基于无人机摄影的地形数据采集
本文中设计的地形数据测量方法可以通过无人机拍摄的目标区域图像信息来实现。因此,获得准确可靠的数据非常重要。在规划和实施管理系统的过程中,本文重点关注测量区域的目标,并从不同角度从相应图像中收集信息。需要注意的是,为了确保计算后期的高精度,本文中安装了无人机,当从不同角度获取图像数据时,无人机可以保持恒定的飞行速度。在此基础上,考虑到地形数据是三维信息,以目标区域中心为起点,并以相应的水平线为参考,360度成像分别在30度、60度和90度进行根据相关技术要求、设计文件,多旋翼无人机航空勘测系统收集现场数据。航空勘测系统是一个专业的航空勘测系统。六架旋转式无人机结合了定位、导航、定位、倾斜成像传感器系统和其他技术 [4] 。该系统包括一个飞行平台、一个监控系统、一个倾斜的放射成像系统,以及地面站和地面数据处理系统等子设施(如下图1、图2所示)。
2.2. 地形绘制数据计算
目前,可以使用地面站的飞行辅助软件来计算和创建这些标准。首先,基于文件设计技术任务中地面分辨率测量和制图要求的比较,设计了航空摄像头和无人机系统。根据有关干扰方法和要求的低空数字航空摄影规范,航空摄影技术参数使用地面站软件设计,包括:
1. 确定高度。图像的地面分辨率根据地图对比表确定有价值分辨率的百分比。根据以下公式计算航行高度。该项目的要求是1:1000比例尺,地球图像分辨率超过10厘米。因此,对于摄影参考飞机,摄影空中高度不应大于5548米。
(1)
式中:H为摄影航高;f为物镜镜头焦距;a为像元尺寸;GSD为航摄影像地面分辨率。
2. 设置像片重叠度。依照低空数字航空摄影规范要求,影像的航向重叠度一般应为60%~80%,最小不小于53%;旁向重叠度一般应为15%~60%,最小不小于8%。
3. 设置航线参数。根据待测区域的实地情况,确定起止点的经纬度,确定航线的方向和长度,利用公式计算出摄影基线的长度及航线间隔的宽度。将这些数据输入至地面监控站,航线数据可自动生成。
(2)
式中:Lx,Ly分别为像幅长和宽,单位为米;px,qy分别为旁向和航向重叠度(以百分比表示);Bx为摄影基线长度,单位为米;Dy为航线间隔宽度,单位为米。
在这个实验区域,首先是从研究区域收集的相关信息,例如高分辨率图像ﻻ该卫星是最新的小尺寸地形图,将通知北京现有的基本数据控制网络定位 [5] 。此外,根据大规模勘测和制图的要求以及勘测区域的现状,本次实验中设计了两张航拍照片。根据高度,空中高度为150至200米,地面分辨率低于0.3米,优于分布区域。定居点控制点位于勘测区域两侧的中线边缘,平均距离约为100米。有必要将控球点放置在没有明显优势的区域。Gnssrtk是一种测量方法,用于协调部署在现场工作中的一组观察点。高度是四级结算顺序和三角上升法,收盘结算精度符合法律要求。计算导入飞行控制系统和地面控制系统的数据路径。无人机根据预先确定的射击方法,使用双倾斜摄像头监控系统沿预定路径飞行。飞行完成后,从飞行控制和导航数据中提取数据,用于验证飞行质量是否符合相关技术要求。如图3、图4所示为设计道路和放置航拍照片。
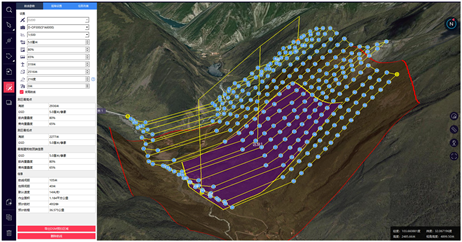
Figure 4. Route design and air sheet laying
图4. 航线设计及航片敷设图
在上述影像数据的基础上,本文通过对不同维度的影像资料进行融合,得到测试区域的三维模型,再利用固定基准点的位置信息,实现对模型内各个位置参数信息的计算,以此实现对地形信息的计算(图5)。
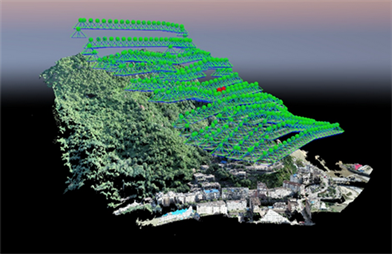
Figure 5. Schematic diagram of UAV data mapping
图5. 无人机数据测绘示意图
(3)
在阶段数据合并的情况下,执行方法可以表示如下:在公式(1)、x、y和z中,飞机和高度参数分别代表合并形成的测试区域3D模型中的信息。不同尺寸的图像数据,x1、y1和y1分别代表从目标区域收集的30度角的飞机和高度标记信息,x2、y2和z2分别代表从目标区域收集的飞机和高度标记信息以60度、x3、y3和z3收集的飞机和高度代表以90度角从目标区域获得的参数信息 [6] 。在此基础上,本文将目标区域的中心点作为参考点,并使用相应的信息格式来确定3D模型中参数的特定值。计算方法如下:
(4)
式(4)中:d表示模型中任意位置与中心点之间的距离,α表示任意位置与中心点在水平方向上形成的夹角,θ表示任意位置与中心点在垂直方向上形成的夹角,x0,y0,z0表示中心点的位置信息。利用这样的方式,根据目标地形在模型中与中心之间的距离关系,就可以计算得到其对应的地形数据信息。通过这样的方式,即可实现对地形数据的准确测量。
3. 应用测试
在本文中设计的测量方法应用影响分析阶段,基于实际环境,建立了传统方法控制小组。
3.1. 测试环境
在选择环境测量的阶段,本文充分考虑了实际应用的总体需求,包括山区测试。考虑到大量测量数据,本文从每种土地类型中选择两个目标来衡量相应的目标(图6)。
3.2. 测试结果
以测试区域地籍数据库中的信息为基准,对两种方法的结果进行分析,得到的结果如表1所示。

Table 1. Error statistics of topographic data measurement results by different methods/cm
表1. 不同方法地形数据测量结果误差统计表/cm
通过分析表1中的数据,两种方法均存在一定误差。然而,通过比较特定信息数据,我们可知本文基于无人机的测绘方法相较于传统方法有较大优势。其中,基于传统方法的测绘所得误差较大且波动较大,平地测绘误差最小的盆地与误差最大的林地相差4.3厘米,而高空的误差最大值和最小值之间相差了2.63厘米,这说明了传统方法的测量结果受地形情况影响较大;此外基于传统方法,无论是平面还是高空测量其误差均在5厘米以上,这对工程的实施极不友好。而利用本文方法,平面测绘误差的最大最小值误差仅有0.92厘米,而高空测绘的误差只有0.78厘米,且误差均在2厘米左右震荡。通过误差的对比,本文有理由相信基于无人机技术的测绘可靠度远高于传统方法 [7] [8] 。
4. 结语
在我国的经济发展过程中,土地和资源信息健康发展的重要基础之一,准确勘测地形信息对我国的经济发展具有重要意义。在本文所提出的方法中,基于无人机成像测量地形数据的方法介绍了从无人机多个角度收集的实时地形图像信息低空成像无人机技术在“短、平、快”方面具有明显优势,不仅可以高效、快速地完成任务,还可以节省大量员工和时间成本,相较于传统的测绘方法具有巨大优势。且随着飞行平台和成像系统的不断改进以及数据处理软件的更新,这项技术将在更多的测量和制图领域发挥更重要的作用。希望通过科研人员的努力,能将无人机的应用推广至更多领域,为祖国的经济建设贡献自己的一份力量。