1. 引言
近年来,多智能体系统的一致性问题引起了学者们的广泛关注,并且在传感器网络 [1] 、编队控制 [2] 、群居昆虫的集群 [3] 、机器人 [4] 等具有广泛的实际应用价值。多智能体系统的一致性是指每个智能体通过与其邻居交换信息而达到同样的状态。
在以往的研究中,学者们考虑的大多都是由相同性质组成的多智能体系统 [5] [6] [7] [8] 。但在实际中,各个智能体会存在差异,并不完全相同,导致多智能体系统将会涉及更复杂的动力学。为了更符合实际环境,许多学者开始研究异构多智能体系统的一致性问题。例如,文献 [9] 在固定和切换拓扑下,针对由一阶和二阶组成的异构多智能体系统,分别给出了系统达成一致性的充分条件。文献 [10] 在有向通信拓扑下,研究了二阶异构多智能体系统的一致性问题。随着研究的发现,在实际环境中主要为非线性系统,因此,学者们开始研究异构非线性多智能体系统的一致性问题,并取得一些成果。文献 [11] 研究了异构多智能体系统的一致性。该系统由具有不同非线性项的二阶线性和非线性智能体组成。文献 [12] 在无向通信拓扑下,研究了由一阶线性和二阶非线性智能体组成的异构多智能体系统的一致性问题。文献 [13] 在切换拓扑下,研究了时变非线性多智能体系统的“领导–跟随”一致性问题。
然而在上述异构非线性多智能体系统的一致性研究中,学者们很少考虑输入饱和的影响。在实际的情况下,智能体的控制输入受到物理限制,这导致智能体的输入是有界的。因此,研究具有输入饱和的异构非线性多智能体系统的一致性问题变得更加有意义。文献 [14] 针对异构系统,分别提出了输入饱和的控制协议与非输入饱和的控制协议,研究了由二阶线性和非线性智能体组成的异构多智能体系统的一致性问题。文献 [15] 研究了具有非线性输入约束的一阶多智能体系统的群体一致性。值得注意的是,上述工作大多采用的是传统的周期采样,每隔一段时间智能体之间进行互相通信,将会造成通讯资源的不必要的浪费。
为了减少智能体之间频繁的通信次数和节省通讯资源,学者们提出了事件触发控制 [16] 。事件触发控制是一种控制方法,通过判断事件触发函数是否达到阈值来触发智能体的控制器并更新智能体的状态。文献 [17] 在有向通讯拓扑下,针对非线性动态的多智能体系统,提出了基于事件触发的一致性控制协议。文献 [18] 在有向通讯拓扑下,基于事件触发控制研究了非线性多智能体系统的固定时间一致性问题。文献 [19] 基于事件触发控制研究了非线性多智能体系统的固定时间分群一致性问题。文献 [20] 针对智能体自身具有的非线性动力学特性的领导–跟随者系统,通过设计一个集中式事件触发一致性协议,给出了实现一致性的充分条件。
在实际的控制过程中,整个系统本身可能无法自主达到我们期望的一致性状态。因此,为了解决这个问题,我们可以基于牵制控制对部分节点直接施加控制,从而使整个多智能体系统达到实际期望的一致性状态。目前,在牵制控制方面也取得一些成果。例如,文献 [21] 基于牵制控制,研究了一类具有输入饱和的异构多智能体系统的群体一致性。文献 [22] 研究了受外部干扰的多智能体系统的固定时间群一致性问题,为多智能体系统构造了两种牵制控制算法,这不仅减少了控制器的数量,而且实现了预期的跟踪一致性。
受上述文献的启发,本文基于事件触发控制和牵制控制,研究了异构非线性多智能体系统的一致性问题,其中异构系统由一阶智能体和二阶智能体组成。本文的主要贡献如下:首先,考虑了一阶智能体和二阶智能体的控制输入受到物理限制,这使得研究结果更加适用于实际控制系统。其次,考虑了异构多智能体系统都受到非线性的影响,且非线性项各不相同。最后,加入了事件触发控制和牵制控制,不仅使系统达到我们期望的一致性状态,而且减少了控制器的更新次数,有效地节省了通信资源的消耗。
本文的其余部分组织如下。第2节准备工作。第3节讨论了在相应的控制协议和假设条件下可以使得异构系统实现一致性。第4节中显示了一些仿真示例和仿真结果。第5节总结了本文。
2. 准备工作
2.1. 图论
考虑由n个智能体组成的系统,它们之间的通信拓扑我们用
来表示。其中
表示节点的集合,
表示边集合,
为通信拓扑的邻接矩阵。
表示节点i的邻居节点集合。当第i个智能体和第j个智能体有通信交流,我们就说它们为邻居,则
,否则
。若图G是无向图,则邻接矩阵
为对称矩阵。由于在这里我们不考虑自环,所以
。
2.2. 异构多智能体系统的动力学模型
考虑由m个一阶智能体和
个二阶智能体构成的非线性多智能体系统。异构非线性多智能体系统的动力学方程可以表示为:
(1)
其中
表示一阶智能体的集合,
表示二阶智能体的集合。
,
和
表示第i智能体的位置状态,速度状态和控制输入。
是连续的非线性函数。
引理1 (LaSall不变集原理 [23] )考虑自治系统
,设
是一个有界闭集,从
内出发的式
的解
(停留在
内),若标量函数
具有一阶连续偏导数。使得
1)
,
;
2) 当
时有
。
令S为使得
的所有点组成的集合,即
,M是S中最大的不变集。于是随着
,从
出发的每个解
都趋于M。
定义1 对于异构非线性多智能体系统(1)能够达到渐近一致,当且仅当给定各智能体任意的初始状态时,
(2)
其中
表示一阶和二阶智能体的集合。则认为异构非线性多智能体系统(1)可以实现一致性控制。
式(2)中的目标值
是通过牵制控制得到的期望位置状态。在控制过程中,我们可以通过调整目标值
来获得智能体不同的收敛位置状态。
假设1 异构非线性多智能体系统(1)的通信拓扑是固定的无向连通图。
假设2 关于非线性函数
和
,总存在对应的常数
和
,使得非线性函数满足
和
。
3. 主要结果
在本节中,我们将基于事件触发控制和牵制控制,研究具有和不具有输入饱和的异构非线性多智能体系统的一致性问题。
3.1. 不具有输入饱和的异构非线性多智能体系统的一致性
在本小节中,为了确保异构非线性多智能体系统(1)达到一致性,给出如下控制协议
(3)
其中
、
和
分别表示邻接矩阵、反馈增益和牵制增益。
表示智能体i的第k次事件触发时间,
是智能体i的事件触发时刻序列。
表示智能体i的第j个邻居节点的最新一次触发时刻,
是智能体i的第j个邻居节点的事件触发时刻序列。
为了实现系统(1)的一致性,对于任意一个智能体,其位置测量误差和速度测量误差定义为
(4)
(5)
接下来,邻居节点的位置测量误差定义为
(6)
此外,将系统的一致性误差定义为
(7)
根据(4)~(7),令
和
,则控制协议(3)可以重写为
(8)
在本节中,我们提出了一种分布式事件触发方案,设计一阶智能体和二阶智能体的事件触发条件如下:
(9)
(10)
其中
(11)
(12)
当条件(9)或(10)不成立时,对应的智能体将触发控制器,更新和传递自身的采样信息,并更新控制信号。
基于所提出的控制协议和事件触发条件,接下来的定理1将解决不具有输入饱和的非线性异构多智能体系统的一致性问题。
定理1 假设1和假设2成立时,在控制协议(3)以及事件触发条件(9)和(10)的作用下,若满足
(13)
(14)
其中要求
,即一阶智能体都需要被牵制。则该异构非线性多智能体系统(1)能够实现一致性。
证明 根据式(8),则异构非线性多智能体系统(1)可重写为
(15)
构造李雅普诺夫函数为
显然可以得到
。
对V关于t进行求导和
有
(16)
由假设2知
则式(16)为
(17)
再根据事件触发条件(9)和(10),则式(17)为
(18)
当式(18)满足(13)和(14)时,有
。
基于拉萨尔不变原理,设
和M是S中最大的不变集。当
时,我们有
(19)
在
时,代入式(15)有
根据假设条件2,可以得到
和
。
则这个最大的不变集M被表示如下:
(20)
由式(20)可知
(21)
(22)
根据式(21)和式(22)有
(23)
可以得到
,即
。
则有
综上所述,即证明了定理1。
3.2. 具有输入饱和的异构非线性多智能体系统的一致性
在本小节中,为了确保异构非线性多智能体系统(1)达到一致性,给出如下控制协议
(24)
其中
、
和
分别表示邻接矩阵、反馈增益和牵制增益。
表示智能体i的第k次事件触发时间,
是智能体i的事件触发时刻序列。
表示智能体i的第j个邻居节点的最新一次触发时刻,
是智能体i的第j个邻居节点的事件触发时刻序列。
为了实现系统(1)的一致性,对于任意一个智能体,其位置测量误差和速度测量误差定义为
(25)
(26)
接下来,邻居节点的位置测量误差定义为
(27)
此外,将系统的一致性误差定义为
(28)
根据(25)~(28),令
和
,则控制协议(24)可以重写为
(29)
我们先证明给的控制协议(29)中饱和函数的有效性。对于每个智能体
,可得
(30)
得到
是有界的,并且只与通信拓扑和控制参数有关。
在本节中,我们提出了一种分布式事件触发方案,设计一阶智能体和二阶智能体的事件触发条件如下:
(31)
(32)
其中
(33)
(34)
当条件(31)或(32)不成立时,对应的智能体将触发控制器,更新和传递自身的采样信息,并更新控制信号。
在饱和的情况下,需要以下假设。
假设3 关于非线性函数
和
,总存在对应的常数
和
,使得非线性函数满足
和
。
基于所提出的控制协议和事件触发条件,接下来的定理2将解决不具有输入饱和的非线性异构多智能体系统的一致性问题。
定理2 假设1和假设3成立时,在控制协议(24)以及事件触发条件(31)和(32)的作用下,若满足
(35)
(36)
其中要求
,即一阶智能体都需要被牵制。则该异构非线性多智能体系统(1)能够实现一致性。
证明根据式(29),则异构非线性多智能体系统(1)可重写为
(37)
构造李雅普诺夫函数为
显然可以得到
。
对V关于t进行求导和
有
(38)
由假设3知
则式(38)为
(39)
再根据事件触发条件(31)和(32),则式(39)为
(40)
当式(40)满足(31)和(32)时,有
。
基于拉萨尔不变原理,设
和M是S中最大的不变集。当
时,我们有
(41)
可以进一步得到
(42)
在
时,代入式(37)有
根据假设条件3,可以得到
和
。
则这个最大的不变集M被表示如下:
(43)
由式(43)可知
(44)
(45)
根据式(44)和式(45)有
(46)
可以得到
,即
。
则有
综上所述,即证明了定理2。
4. 数值模拟
在本节中,将用两个仿真例子验证在基于牵制控制下,具有和不具有输入饱和的异构非线性多智能体系统可以实现一致性。在仿真中,异构多智能体系统由5个智能体组成,包含2个一阶智能体和3个二阶智能体。通信拓扑如图1所示。
其中1~2为一阶智能体,3~5为二阶智能体。则邻接矩阵如下:
我们选择智能体的初始状态为
,
。牵制增益
、反馈增益
以及想要达到期望的理想状态为
。
根据上述参数,在
和采样间隔
对系统(1)进行仿真。验证具有和不具有输入饱和的异构非线性多智能体系统能够实现一致性。
对于不具有输入饱和的控制协议(3),选择非线性项
,
,
,
,
。图2(a)为控制协议(3)下智能体的位置状态信息,图2(b)为控制协议(3)下智能体的速度状态信息;图3为控制输入;图4为各个智能体的触发时间。
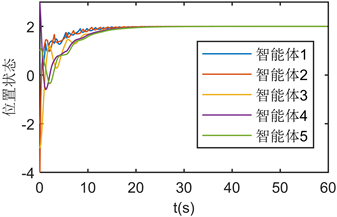 (a) 位置状态
(a) 位置状态 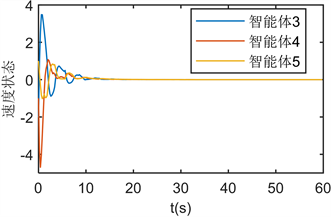 (b) 速度状态
(b) 速度状态
Figure 2. Trajectory of the agents under control protocol (3)
图2. 控制协议(3)下智能体的轨迹

Figure 3. Control input of the agents under control protocol (3)
图3. 控制协议(3)下智能体的控制输入

Figure 4. Event trigger time diagram of the agents under control protocol (3)
图4. 控制协议(3)下智能体的事件触发时间图
从图2和图3中,我们可以看出各智能体的位置达到了我们期望的位置状态,而且速度趋近于0。这意味着在控制协议(3)下能够实现异构非线性多智能体系统的一致性,这说明了定理1是有效的。另外通过图4,可以看出各个智能体的触发时刻。
对于具有输入饱和的控制协议(24),选择非线性项
,
,
,
,
。图5(a)为控制协议(24)下智能体的位置状态信息,图5(a)为控制协议(24)下智能体的速度状态信息;图6为控制输入;图7为各个智能体的触发时间。
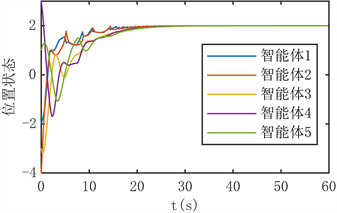 (a) 位置状态
(a) 位置状态 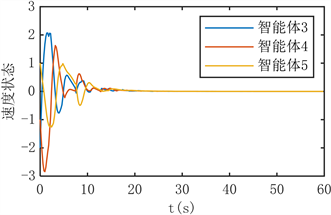 (b) 速度状态
(b) 速度状态
Figure 5. Trajectory of the agents under control protocol (24)
图5. 控制协议(24)下智能体的轨迹

Figure 6. Control input of the agents under control protocol (24)
图6. 控制协议(24)下智能体的控制输入
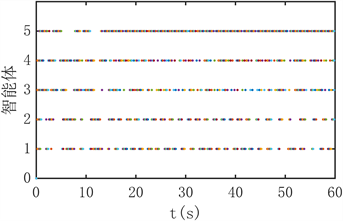
Figure 7. Event trigger time diagram of the agents under control protocol (24)
图7. 控制协议(24)下智能体的事件触发时间图
从图5和图6中,我们可以看出各智能体的位置达到了我们期望的位置状态,而且速度趋近于0。这意味着在控制协议(24)下能够实现异构非线性多智能体系统的一致性,这说明了定理2是有效的。另外通过图7,可以看出各个智能体的触发时刻。
通过图4和图7,我们记录了具有和不具有输入饱和的异构非线性多智能体系统实现一致性过程中,各个智能体的触发次数。我们与周期采样控制相比,对比数据见表1。

Table 1. Comparison of periodic sampling control and event trigger control
表1. 周期采样控制与事件触发控制的比较
从中我们可以看出,具有输入饱和的异构非线性多智能体系统中的触发次数减少了约42.33%;不具有输入饱和的异构非线性多智能体系统中的触发次数减少了约43.8%。总之,在事件触发控制下,具有和不具有输入饱和的异构非线性多智能体系统有效的减少了通信次数。
5. 结束语
本文基于事件触发控制和牵制控制,研究了具有和不具有输入饱和的异构非线性多智能体系统的一致性。在无向通信拓扑下,针对带有非线性项的异构多智能体系统,设计了具有和不具有输入饱和的控制协议、适当的Lyapunov函数以及一些假设条件,证明了异构多智能体系统可以实现一致性。最后,数值模拟结果表明,异构非线性多智能体系统不仅达到了我们期望的一致性状态,而且减少了通信次数,有效地节省通讯资源。下一步将探讨异构非线性多智能体系统的有限时间一致性。
基金项目
长安大学中央高校基本科研业务费专项资金资助(CHD300102122113),陕西省自然科学基础研究计划项目(2023-JC-QN-0009)。