1. 引言
群智能优化算法是通过模拟自然界中的一些动物或植物的行为规律,在解空间中进行全局寻优的一种方法。近几年来,学者们研究了一系列的新智能优化算法,如:蚁群算法(Ant Clony Optimization, ACO),狮群优化算法(Loin Swarm Optimization, LSO),灰狼优化算法(Grey Wolf Optimizer, GWO),鲸鱼优化算法(Whale Optimization Algorithm, WOA)等等,这些算法鲁棒性 [1] 较强,有较广适用范围 [2] 并且操作简单,被广泛运用于各种领域 [3] 。其中受蚁狮捕捉蚂蚁的过程启发,2015年澳大利亚作者Seyedali提出一种群智能算法即蚁狮优化算法(Ant Lion Optimizer Algorithm, ALO),目的是为了解决函数优化问题 [4] 。虽然ALO算法提出时间较短,但因其具有全局优化,收敛精度高,鲁棒性较好的优点,与新型的元启发式算法鲸鱼算法(Whale Optimization Algorithm, WOA)、正余弦算法(Sine Cosine Algorithm, SCA)以及樽海鞘算法(Slap Swarm Algorithm, SSA)具有一定的可比性。目前,蚁狮优化算法已被应用到改进无人机 [5] ,SVM (Supported Vector Machine) [6] 、Elman神经网络以及并行机调度 [7] 求解等方向,并取得了较好的成果。
但是蚁狮优化算法后期精英蚁狮影响因子较小,易受较差蚁狮影响,造成算法易陷入局部最优,收敛速度较慢求解精度较低等问题 [7] ,近年来很多科研工作者对蚁狮优化算法进行了改进,为了提高算法的全局搜索能力和寻优精度,李宗妮等 [8] 通过蚁狮的位置改变蚂蚁的搜索边界,使其与精英蚁狮更好地搜索有效区域;吴伟民等 [9] 通过自适应反馈调整蚁狮收缩的范围使算法收敛精度得到提高;赵小国等 [10] 通过蚂蚁的动态搜索和范围收缩改进蚁狮优化算法,使算法的收敛速度得到提高。为了增加种群多样性:王亚东等 [11] 将差分进化思想引入蚁狮优化算法,通过反向学习策略 [12] 改进了蚂蚁的更新位置。为了解决蚁狮优化算法的早熟和局部最优问题:Haydar Kilic等 [7] 使用锦标赛选择策略改变ALO算法中蚂蚁和蚁狮的更新公式的同时自适应改变其步长,使之能够较好地平衡全局搜索能力及局部搜索能力;Alaa Tharwat等 [13] 提出了基于混沌映射和罚函数的蚁狮优化算法,减少蚂蚁搜索范围,加快算法寻优速度。
以上对蚁狮优化算法的改进,虽然在一定范围内上减少了算法落入局部最优的可能性。但是改进后的算法仍然存在收敛精度较低,开发能力较差等缺点,仍需进一步研究,鉴于此,考虑到柯西变异能够对当前较差蚁狮进行扰动 [14] ,防止算法陷入局优,将反向学习策略应用到蚂蚁种群中,丰富种群多样性,最后将具有较强探索能力的ALO算法和较好的开发能力的ICS算法相结合 [15] [16] ,提出一种基于免疫克隆的蚁狮优化算法,通过对蚁狮进行克隆、变异、选择等操作有效的平衡算法的探索与开发能力。通过10个基准测试函数 [17] 仿真实验和组合优化实验 [18] ,体现出改进后蚁狮优化算法相比其它算法有更强的收敛性和寻优性能,并且延展算法在实际工程中的应用领域。
2. 基本的蚁狮优化算法
具体运算步骤如下 [19] [20] :
1) 首先将蚂蚁的位置参数初始化,自定义维数为D,迭代次数为T,同时随机初始化N个蚂蚁位置的解
2) 通过轮盘赌策略选取一个蚁狮,并安排一个蚂蚁在蚁狮周围,同时记录其位置
(1)
其中,cumsum是计算存在的蚂蚁移动位置和,n是最大迭代次数,t表示随机行走的步数(在本研究中指是迭代数),
是一个随机函数。
3) 对公式进行归一化处理
(2)
式中
表示蚂蚁在第i维第t次迭代时的位置
分别为蚂蚁步长的上下界,
为蚂蚁游走的上下界,为了使迭代的蚂蚁在指定范围内移动,运用I对其约束。
(3)
其中I是一个比率,表示在第t次迭代中存在变量的最小值向量,T指最大迭代次数,q与迭代次数相关,同时也定义了在第t次迭代中存在变量的最大值向量。
4) 最后一个过程是假设当蚂蚁比其对应的蚁狮适应度更好(进入沙子内)时,就会存在一只对应的蚁狮将当前蚂蚁的位置占据,使蚁狮能够捕捉到迭代后适应度更好的蚂蚁。
5) 由于精英蚁狮是适应度值最优的蚁狮,因此假定每个蚂蚁都通过轮盘赌轮和精英策略同时随机地绕着选定的蚁狮行走,如下所示:
(4)
其中
表示第t次迭代时蚂蚁绕轮盘赌选择的蚁狮周围的随机游动,
是在第t次迭代中绕着精英蚁狮的随机游走。
6) 蚂蚁位置更新后计算对应目标函数的适应度并与精英蚁狮进行比较,选择较好的适应度值为全局最优解,如果蚂蚁适应度大于蚁狮的值,则更新蚁狮位置。
7) 当算法达到最大的迭代次数时使则停止搜索,并输出最优解,否则循环上述过程。
3. 基于免疫克隆的蚁狮优化算法
3.1. 反向学习策略
ALO初始种群是随机生成,由于蚂蚁分布不均匀,导致种群多样性减少,导致算法收敛速度下降,受Tizhoosh [21] (2005)提出的反向学习策略启发,首先随机生成初始种群,然后通过初始种群生成反向种群,从中选取较优的种群作为下一代种群。反向学习策略能够选择更靠近个体的种群作为最初个体,由于每个个体距离最优解的位置更近,有利于提高算法收敛速度,并且由于反向学习策略能够对有效区域进行搜索,能够提高种群的多样性,增强算法全局搜索能力。
首先对蚂蚁种群的反向种群进行初始化定义
(5)
(6)
将随机生成的蚂蚁种群和其反向种群合并为一个新的种群,求新种群的适应度函数,并将适应度值按升序排列,取前M个最优初始解作为新的蚂蚁初始种群。生成的蚂蚁反向种群和随机生成的种群重组为一个新的种群,重新计算新种群的适应度值,并按照适应度值进行排列,取排列的前M项作为蚂蚁的最初种群。
3.2. 基于柯西变异的精英蚁狮扰动机制
判断一个算法的计算效率和准确性主要权衡其开发能力和搜索能力,根据蚂蚁更新公式可知,其受蚁狮和精英蚁狮的影响概率是相同的,因此在后期寻优能力较差,易受较差蚁狮的影响,过早陷入局优,因此,本文在精英蚁狮的更新时引入柯西变异算子 [22] 。柯西变异能够在精英蚁狮周围区域进行搜索,通过在最优解周围随机扰动,增强蚂蚁局部寻优的能力,柯西概率密度如式7所示。
(7)
其中,
是位置参数,
是一个大于0的随机变量,
是一个实数。本文中取
,
,其为标准柯西分布。通过分析其概率密度函数,可知其没有特定的均值和方差,但众数和中值都等于位置参数,即
其分布函数如式(8)所示:
(8)
柯西分布与正态分布和高斯分布相比,其具有更均匀的整体分布;极值更高并且尾部的概率较大,有较大的散布特性,能够更好的对极值点周围进行搜索对精英蚁狮的扰动公式如下所示:
(9)
(10)
其中,
表示精英蚁狮在第t次迭代时的适应度值。通过局部扰动,引导算法跳出局部最优。
精英蚁狮的个体迁移有利于算法的加速收敛,但是如果精英蚁狮的更换频率较高则会使最优蚂蚁群体迁移至另一蚂蚁种群,在之后的迭代过程中,会出现较优的精英蚁狮捕获所有的蚂蚁种群,使算法陷入局优,因此设计新的策略在收敛性和多样性之间实现平衡是下一步改进的重点。
3.3. 算法融合策略
3.3.1. 免疫克隆选择算法(Immune Clone Algorithm, ICA)
免疫克隆选择算法 [23] (Immune Clone Algorithm, ICA):首先将初始的抗体群进行克隆并从中选择优秀的抗体,通过免疫基因操作提高优秀抗体的多样性,同时使用抗体修正操作改变较差的抗体,提高算法局部寻优能力。如果把优化中后期较差蚁狮视为抗体,把蚁狮的候选解视作抗体,那么生物免疫系统的免疫识别和免疫相应过程就可以与蚁狮优化算法联系起来,通过克隆操作来提高蚁狮优化算法中种群的多样性,在使用免疫操作改变较差蚁狮提高算法的收敛性,见图1所示。
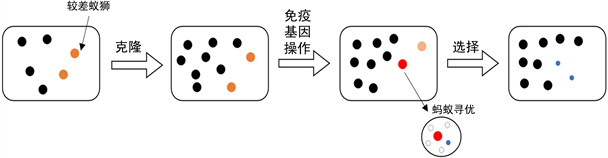
Figure 1. The search process of the antlion optimization algorithm based on immune cloning
图1. 基于免疫克隆的蚁狮优化算法的搜索过程
3.3.2. ICALO的执行
该算法以基本的蚁狮优化算法为框架,以进化停滞步数n > m (进化停滞步数阈值),作为调用ICA算法的条件,当停滞步数大于进化停滞步数阈值时,将克隆、免疫、选择等操作引入蚁狮的更新中,通过不断调用ICA算法使蚁狮变异,更新蚂蚁的搜索空间,扩大蚂蚁的搜索范围,最终获得可行解集。具体操作如下所示:
1) 克隆操作:通过锦标赛选择策略,选择出适应度较高的蚁狮,保证其蚂蚁的搜索空间能围绕较优的位置,对选出的较优蚁狮按照一定的比例进行复制,增加局部寻优的多样性以及扩大蚂蚁的寻优空间。锦标赛选择策略的实现过程为,首先设置队伍规模为B1,蚁狮群提供的选择规模为B2,通过在B2中随机选择B1个蚁狮进行比较,保留非支配等级较高且拥挤度距离大的蚁狮进行下一轮选择,重复选择B2次,最终选出的B2个蚁狮,即为克隆选择的抗体群。
克隆得到的蚁狮如下:
(11)
克隆操作后存在的蚁狮抗体群如式(12)所示:
(12)
其中,蚁狮数量为
,A1为克隆选择时所保留的蚁狮数量,k为克隆的比例,经大量测试证明k = 3效果最优。
2) 自适应免疫基因变异操作
免疫操作是指将基因进行重组和变异,能够较好的提高算法局部微调能力和搜索精度,因此本文在蚁狮位置中加入自适应扰动免疫变异算子,计算公式如下:
(13)
(14)
其中:
为[−1, 1]的随机变量,N(0, 1)为服从标准正态分布的柯西变量,t为当前循环次数,
和
为当前最优蚁狮和最差蚁狮的位置。
3) 编辑选择
通过克隆和变异后,较优蚁狮保持当前位置,较差蚁狮对应的蚂蚁继续寻优,通过局部择优实现较差蚁狮的压缩,同时,结合免疫网络调剂机制 [24] ,进化停滞步数n > 3时对较差蚁狮进行调整,经计算选择如式:
(15)
其中:
为精英蜂群中的蜜源亲和度值,且
该策略能够使较优的蚁狮在与其他蚁狮的竞争中被多次选择克隆,从而提高算法的全局收敛速度。
每次对较优蚁狮进行克隆选择操作后,结合免疫系统记忆机制,将精英蚁狮的位置以及适应度共享至蚂蚁和蚁狮群中,当满足下式时,对精英蚁狮的位置进行更新
 (16)
(16)
免疫克隆算法的收敛速度较快、目标函数多样性较高度进化算法,能够为精英蚁狮提供较多的选择。
3.3.3. 融合免疫克隆的蚁狮优化算法(Antlion Optimization Algorithm Fused with Immune Cloning, ICALO)
对于基本的ALO在前期使用反向学习策略初始化种群,作为算法寻优的基础,通过加入柯西变异提高了算法的搜索性能和开拓性能,最后融合克隆免疫算法使算法避免陷入局部最优,提高算法的精度,算法流程图见图2所示:
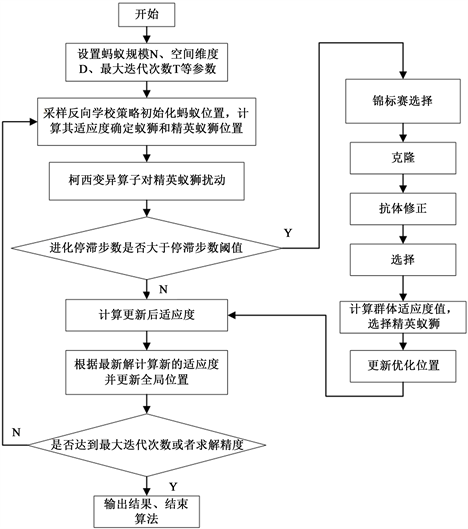
Figure 2. Flowchart of ICALO algorithm
图2. ICALO算法流程图
4. 仿真实验
4.1. 测试函数
为验证改进蚁狮优化算法的有效性,选取10个标准测试函数以及经典NP问题来对改进算法的性能进行数值测试,将计算结果与基本的ALO;Rajan等提出基于加权精英策略的蚁狮优化算法(Weighted Elitism Based ALO, WALO);黄长强等提出反调节混沌蚁狮优化算法(Anti Adjust Chaos Based ALO, HALO);ICA进行对比。实验环境为Win10系统,8GB内存,Matlab2020a软件。参数设置均为:初始化种群数量500,最大迭代次数为500次。为避免偶然性,每种算法在Matlab2020a软件中独立运行30次。
表1为各测试函数的基本参数,分别选取单峰 [25] 和多峰 [26] 来评价算法收敛速度 [27] 和跳出局部最优的能力。式中F1函数和F2函数为单峰值函数,主要用来测试文中改进算法在运算过程中的收敛性能;F3~F10函数均为多峰值函数,其中F8为复杂的多峰函数,全局最小值位于非常狭窄的山谷中,F9为移动、旋转、不可分、可拓展的多峰函数,F10的多峰函数中有无数个极小值点,函数具有强烈震荡形态,很难找到全局最优值。上述函数在寻优特征上各具特性,不仅可以测试改进的算法在处理“早熟”问题上的能力,也适合用来全面测试改进算法的计算精度、收敛稳定性、收敛速度。
10个函数在100维的实验结果见表2,图3为各算法在10种函数下的迭代曲线,可分别对ICA、ALO、HALO、WALO和ICALO具体分析:
ALO在单峰函数求解结果相比其他的算法均较差,但是在F9、F10中求得的最优值和F7、F8中求得的最差值与平均值相比ICA较优。
WALO在单峰函数中的最优解、最差解、平均值均优于对ALO、HALO、ICA。在多峰函数F4~F6和F10中,最优值和平均值相比其他算法更优,但是F4,F7中最差值均比HALO差,可以看出WALO有陷入局优的可能。在函数收敛图中可以看出WALO有效的提高了算法的寻优速度,相比基本的ALO和ICA寻优的迭代次数减少一半。
HALO在F1~F6、F9、F10的最优值、最差值、平均值均优于ALO、ICA。在F3、F5、F6~F10迭代图中也可看出收敛速度较慢。
ICALO在F1、F3、F5~F10函数的最优值、最差值、平均值相比ALO、HALO、WALO、ICA有更好的精度,且可以看出受维度影响较小,在高维函数中也能体现出求解的结果远优于其它算法,并且可以在迭代图中看出算法的收敛速度较快。
从图像和数据可以得知,不论是算法对函数的收敛性能,运行效率,对于“局优值”的处理问题还是求得的解的质量,ICALO都明显优于其他算法,并且在可以看出求解高维函数时有较好的稳定性,这主要是因为在蚁狮的位置中加入了动态权重因子,有效的缓解了轮盘赌策略减少种群多样性的问题,收敛速度较快也可以体现出免疫克隆的引入很大的提高了蚁狮优化算法跳出局优性能,充分说明ICALO求解高维问题的可行和有效性。

Table 2. Comparison of standard function 100-dimensional optimization performance
表2. 标准函数100维优化性能对比
4.2. 0~1背包问题
在组合优化领域,0~1背包问题是较为经典的NP问题,国内外学者分别采用模拟退火算法 [28] 、粒子群算法 [29] 、遗传算法 [30] 等算法对其进行分析研究。本节通过运用ICALO算法对其进行优化,并与ALO、WALO、HALO进行对比,验证ICALO算法在求解组合问题中的可行性。实验环境为Win10系统,8GB内存,Matlab2020a软件。初始种群数为500,最大迭代次数为1000,其他参数设置与上一节相同,每组数据独立运行10次取最优解。
0~1背包问题数学模型如下:
设一共有D个物品,其中第i个物品的的体积为
对应的价格为
,背包容量为C,xi作,变量设为0或1,若物品可以装入背包为1,否则为0。
(17)
(18)
式中:
代表物体的价值向量,
代表物体的体检向量,
代表解向量:
算法的参数设置表3所示:
Table 3. Reference table for basic parameters of 0~1 problem
表3. 0~1问题基本参数参照表
将ICALO与基本的ALO、WALO与HALO对0~1背包问题进行优化对比,得到测试结果如表4所示。
Table 4. Comparison table of results of 0~1 knapsack problem
表4. 0~1背包问题结果对照表
由表4和收敛曲线(见图4)可得,WALO虽然最优值较高,但是得到的较差值和方差相比ICALO更差,说明WALO在0~1背包问题中算法稳定性较差,且结合收敛曲线也可看出在第169,432代陷入局优时间较长,不易于跳出局优;ICA相比ALO得到的结果更优,结合方差看可以看出算法也更稳定,但是ICA的求得的值相比WALO和ALO较差,结合图像可以看出收敛较慢,迭代至412次才能够收敛,而ICALO在第87代就已经收敛,最优值为5187,相比其他算法结果更优。
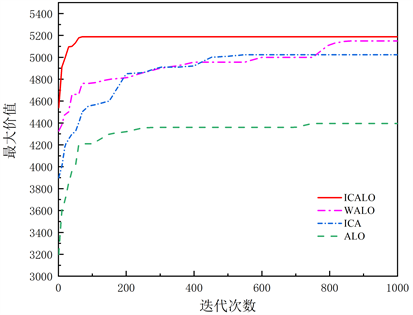
Figure 4. 0~1 knapsack convergence diagram
图4. 0~1背包收敛曲线图
综上所诉,ICALO在0~1背包问题中稳定性较高,能够得到较好的值,且具备较好的跳出局优的能力。
5. 桁架结构优化
5.1. 桁架尺寸的优化
选取典型的空间桁架结构模型来验证ICALO在求解带有约束的桁架优化问题的可行性。并将ICALO的桁架优化与基本的ALO、WALO、ICA算法优化结果进行分析比较。通过使用MATLAB2020a软件来实现ICALO,算法计算10次,使用其平均值作为计算的结果值。各算法参数的取值与第三节相同。
1) 桁架尺寸优化应用
算例1: 600杆空间桁架结构如图5所示。材料弹性模量
;材料密度
。约束条件:所有节点的x及y方向最大位移不得超过6.35 mm;各杆件的最大许用应力 ± 172. 375 MPa。
目标函数如下
(19)
其中Ai是第i个单元的截面积li为第i根杆的长度,
为材料密度。
考虑到对桁架的强度和稳定性,对于应力约束和位移约束条件如下:
(20)
(21)
式中
是第i个单元在第k个载荷工况下的应力,
是第k个载荷工况下节点j在l方向的位移,
和
分别为第i个单元的许用应力值和节点j在l方向的位移允许值,P为载荷工况总数,m为结构的节点总数。
将杆件子结构见表5,ICALO算法初始设置:初始种群个体200;迭代次数500。由于600杆空间桁架结构的数据分析时间较长,并且在每个非固定节点有10 KN的荷载工况对结构产生影响,在此仅与相关算法和文献进行比较。
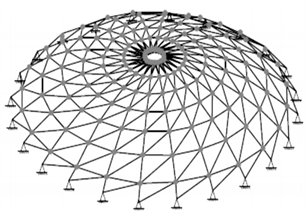
Figure 5. 600-bar space truss structure
图5. 600杆空间桁架结构
Table 5. Results of 10 random optimizations
表5. 10次随机优化结果
本文算法优化结构为6347.65 kg;ALO优化结果为7215.12 kg;HALO优化结果为6698.14 kg。ICA、WALO质量分别为6725.43 kg和6451.78 kg。
迭代的收敛过程如图6所示。可以看出27代前迭代频率较低,迭代幅度较大,32代后迭代频率加快,迭代幅度降低,迭代逐渐平稳,134代收敛于最优解附近,分析上图可以体现出改进的蚁狮算法在求解桁架问题上具有收敛速度快、收敛精度高的优点,并且,免疫克隆算法和柯西变异的加入可以减少蚂蚁在局部优化区域时间的浪费,能够很大程度提高算法的收敛速度,增加蚂蚁的活跃程度以及种群多样性,使其能跳出局优,因此在寻优程度上相比基本蚁狮算法有较大提高。
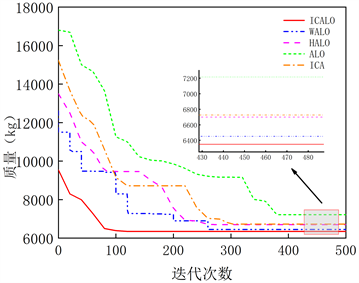
Figure 6. Convergence curve of 600-bar space truss
图6. 600杆空间桁架收敛曲线
5.2. 桁架结构动力特性优化
算例1:18杆平面桁架结构如图7所示。18杆平面桁架包含11个节点,在结构每个非固定节点上有10kg荷载,本桁架存在13个设计变量,其中有4个节点位置变量,且都为连续变量,要求精度误差为10−2 cm和10−2 m,其中18个截面的上下限在1 cm2和10 cm2。杆件的材料弹性模量E = 210 GPa,材料密度
。
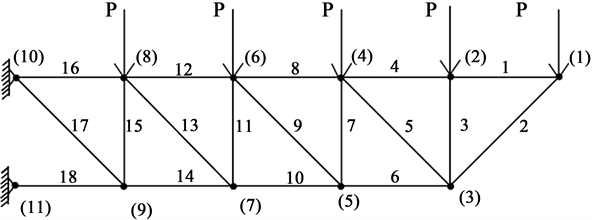
Figure 7. 18-bar planar truss structure
图7. 18杆平面桁架结构
目标函数如下
(22)
本文设计变量增加节点位置变量
,通过对于各杆件间纲量间的耦合作用进行处理,对杆件进行约束如下:
(23)
式中
为应力约束,
为位移约束。
动力学约束如下:
(24)
由于桁架结构优化较为复杂,因此仅与ALO、ICA、WALO进行比较。ICALO算法初始设置:初始种群个体200;迭代次数500。其余算法参数设置同上,10次随机优化收敛曲线见图8,结果如表6所示,最终优化图形如图9所示。
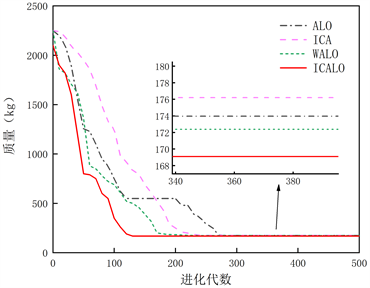
Figure 8. Convergence curve of 18-bar plane truss
图8. 18杆平面桁架收敛曲线
Table 6. Comparison of 10 random shape optimization results
表6. 10次随机形状优化结果对比
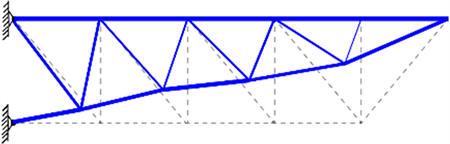
Figure 9. Structure diagram of the planar 18-bar truss after ICALO layout optimization
图9. ICALO布局优化后的平面18杆桁架结构图
由表6可以看出ICALO算法所求的结果均比ALO、WALO、ICA更优,并且在平均值和最优值数值上有明显的提高,从表6可以看出ICALO算法的最优解相比ALO,ICA,WALO算法分别轻了4.43 kg、6.73 kg、3.95 kg。
在图8可以看出相比ALO,ICALO收敛速度更快,并且ICALO在第114代就达到最优值附近,而ALO和WALO分别在283代和178代趋于最优值,ICALO精度也明显优于其他算法。优化后空间桁架结构图见图9。
算例2:145杆平面桁架结构如图10所示。结构外围存在固定约束,每个非固定节点上有100 kg荷载,本桁架存在145个设计变量,其中有56个节点位置变量,且都为连续变量,要求精度误差为10−2 m以内,其中杆截面的上下限在1 cm2和200 cm2,标准模块和桁架分组见图11。



Figure 10. Structure diagram of 145-bar space truss
图10. 145杆空间桁架结构图

Figure 11. Standard modules and trusses grouping
图11. 标准模块和桁架分组
本次优化考虑三种设计变量
1) 考虑桁架横截面积和高度变量
其中各层高度约束如下:
2) 考虑桁架横截面积和布局变量
(布局变量是指同一高度相邻节点之间距离的设计,其中每层杆件数小于48根,由于每层节点位置的改变会引起总荷载的改变,因此将每层荷载设置为一个总量,平均分配至每个节点处。)
3) 考虑桁架横截面积、布局变量和布局变量(高度和布局约束同上)
本桁架优化时需要在左右对称的条件下,按左右对称分为8组,每组18根杆,如图10所示,其中12个节点位置变量,位移可以在x,y,z三个方向移动,精度在1 cm以内。结构第一约束频率为
,第二固有频率
,为了对结构在不同频率下质量进行研究,将结构频率为
和
的结果进行比较。桁架优化结果和变形图如下:

Figure 12. Deformation diagram and convergence curve of the highly optimized 145-bar space truss structure
图12. 高度优化145杆空间桁架结构变形图及收敛曲线
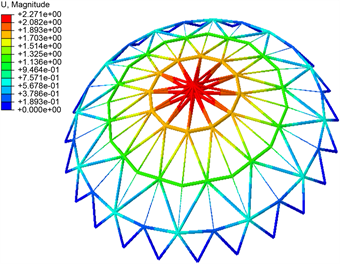
Figure 13. Displacement deformation diagram and convergence curve of 145-bar space truss structure after layout optimization
图13. 布局优化后145杆空间桁架结构位移变形图及收敛曲线

Figure 14. Displacement deformation diagram and convergence curve of low-frequency 145-bar space truss structure
图14. 低频率145杆空间桁架结构位移变形图及收敛曲线

Figure 15. Deformation diagram and convergence curve of high frequency 145-bar space truss structure
图15. 高频率145杆空间桁架结构变形图及收敛曲线
图12~15分别为不同算法在不同设计变量下桁架优化最终变形图及优化收敛曲线,从表7中可以看出不同频率方案下的10次的优化结果,相比WALO、ALO、ICA,ICALO在高频率和低频率优化结果下都能使得质量更小,同基本的ALO相比,质量最高能够减小80%,并且从收敛曲线中可以看出ICALO收敛速度较快,能够更好的跳出局优。桁架优化最终变形图可以看出施加荷载后桁架位移都在3 cm以内,但是在ALO优化后,整体桁架频率超出约束范围,说明本文的改进策略能够较好的适应桁架的力学特征。并且从桁架的位移图中可以看出,布局优化后每层杆件的位移相比高度优化减少15.04%,杆件受力相比只考虑横截面和高度的桁架结果更优;从图14、图15可以看出在考虑频率约束后,相比小频率桁架频率较大的结构在优化后,位移减少58.04%,质量增加30.61%,每层桁架的位移相比小频率桁架有较好的改善。但是,由于优化的单体杆数从18根变为23根,桁架总重量从9120 kg变为12,426 kg,优化前后质量相差过大,若对桁架稳定性要求较低,出于经济性考虑,对于桁架的优化仅从高度和横截面积等变量进行优化。
Table 7. Optimization results of 10 times under different frequency schemes
表7. 不同频率方案下的10次的优化结果
6. 结论
1) 本文对于蚁狮算法易陷入局部最优,后期收敛速度较慢求解精度较低等问题,提出基于免疫克隆选择的蚁狮算法,改进机制是通过在精英蚁狮更新中加入柯西变异算子,提高算法后期的开发能力,改变自适应权重和高斯变异,减少后期较差蚁狮对蚂蚁的影响,进一步提高算法全局寻优能力以及收敛精度,通过10个标准测试函数和0~1背包问题分析出改进后算法收敛速度更快,更易于跳出局优。
2) 本文以桁架的横截面积、高度、布局为设计变量,对桁架结构的应力、位移和频率进行约束,将ICALO算法应用到桁架结构的优化中,并通过最优解对桁架结构形状进行优化,得出桁架结构形状和受力变形图,体现出改进蚁狮算法应用于实际工程的可行性。但是如何运用算法对桁架材料以及对算法本身的时间复杂度进行优化是下一步需要具体研究和探索的方向。
基金项目
河北省教育厅在读研究生创新能力培养资助项目(CXZZSS2022028)。