1. 引言
随着无人机技术的高速发展,无人机编队飞行作为一种高效、灵活的飞行方式,正在得到越来越广泛的应用和研究。无人机编队飞行不仅可以提高多个无人机之间的协同任务能力,还具有更高的容错性,可以应对复杂和危险的环境。
传统的无人机定位方法主要依赖于GPS或其他主动传感器,但这些方法存在着一些局限性。在某些环境中,如森林、封闭空间,GPS信号可能受到阻塞或干扰,导致无法获得准确的位置信息。此外,主动传感器的使用也会增加无人机的能耗和复杂性。为了解决这些问题,纯方位无源定位技术应运而生。纯方位无源定位是一种利用无源信号源进行定位的方法,它不需要主动发送信号或与信号源进行通信。相比于传统的定位方法,纯方位无源定位具有更好的抗干扰能力、更低的能耗和更高的隐蔽性。
在无人机编队飞行中,纯方位无源定位技术可以为无人机提供准确的位置信息,实现无人机之间的精确控制和协同飞行。目前对于无人机遂行编队飞行中纯方位无源定位的研究还相对有限。因此,本研究旨在探索无人机遂行编队飞行中纯方位无源定位的方法和算法。通过该研究,我们将为无人机编队飞行的实际应用提供技术支持,推动无人机编队飞行技术的进一步发展。
在下文中,我们将首先确定问题并对其进行分析。然后,我们将进行模型建立与求解,最后我们对实现算法进行分析并提出改进方法。通过本研究的开展,我们期望能够为无人机编队飞行中的纯方位无源定位技术提供新的见解和方法,并促进无人机技术在各种领域的应用。
2. 基于三角定位无人机纯方位无源定位问题研究
2.1. 基于三角定位无人机纯方位无源定位问题提出与讨论
2.1.1. 问题1
一个由10架无人机组成的圆形编队:1架无人机位于圆心、编号FY00,其余9架无人机均匀分布在同一圆周上、编号FY01-FY09。问题中被动接收信号的无人机均存在较小的位置偏差。在所有无人机均保持同一高度的情况下,我们对下述三个问题展开讨论:
(1) 利用位于圆心的无人机FY00以及另外2架位置无偏差且编号已知的无人机发射信号,让其余的无人机被动接收信号,建立一个数学模型来描述此时这些位置存在偏差的无人机的位置;
(2) 一架被动接收信号无人机在接收到来自FY00、FY01的信号同时还需收到多少架编号不明的无人机发射的信号,才可以实现有效定位;
(3) 已知无人机编队各无人机的初始位置,每次只能选择FY00和圆周上最多3架无人机发射信号,在确保无人机发射电磁波尽可能少的情况下,仅依据被动接收信号无人机接收到的方向信息来调整该无人机的位置,设计一个位置调整方案。
2.1.2. 问题2
无人机编队采用锥形队列飞行时,直线上相邻两架无人机的间距相等,采用无源定位的方法,在确保无人机发射电磁波尽可能少的情况下,设计一个位置调整的方案。
2.2. 基于三角定位无人机纯方位无源定位问题分析
2.2.1. 问题1分析
在问题1中,已知该圆形编队中的所有无人机均保持在同一高度飞行,这意味着无需在确定无人机的位置时关注该无人机的飞行高度,仅需在二维平面上讨论无人机的位置区域。
因此,对于问题1的(1)、(2)、(3)三个小题,我们有如下分析:
对于(1):假设各个无人机的飞行速度不变且相同,则被动接收信号无人机与发射信号的无人机的相对位置不会发生改变,且被动接收信号的无人机所接受的方位信息为以该无人机为顶点与另外3架发射信号的无人机中的任意两架无人机连线之间的夹角。选择任意两个发射信号无人机的连线为弦、以对应的夹角为圆周角作出三个圆。由圆周角定理及其推论可知,圆上的任意一点与圆上两架发射信号的无人机连线之间的夹角与被动接收信号无人机与圆上两架发射信号无人机连线之间的夹角相等(因为被动接收信号无人机位置是略有误差,假定它在自己的理想位置附近,此时符合圆周角定理及其推论的条件)。这样,可以通过这三个圆的不同区域(即圆外、圆上、圆内)代表方位角取不同数值时的情况来分别讨论无人机的位置,并最终确定被动接收信号无人机的位置与其方位角之间的关系 [1] ,在此基础上建立被动接受信号无人机的位置模型。
对于(2):发射信号的无人机包括FY00、FY01,又由问题1的(1)可知:至少需要3架无人机发射信号即可实现有效定位。因此,在此问题中暂且先假定只有1架编号未知的无人机发射源。在此种情况下,被动接收信号无人机分别接收来自FY00、FY01以及编号未知的无人机(暂时将其编号定为FY0X)的信号,题(2)所述,发射信号的无人机不含有偏差,接收信号的无人机仅含有略微偏差,经过上述分析,接收信号的无人机与其理想位置下的无人机为顶点再以FY00、FY01以及FY0X三边形成的三个角,且角度偏差较小,经过数值表以及问题(1)中的图形对称可知理想位置下以FY00、FY01为两个定点,且除这两个定点以外其他任意无人机为第三个点构成的三个角,当不在理想状态时,将这三个角的角度与数值表上角度的数值进行差值比较,差值最小的那两组数据中必有一组数据对应的无人机的编号为此时四个无人机的编号,但是在理想状态下,无人机的飞行编队存在着一定的对称性,难以确定FY0X的具体编号,需要再引入一架发射信号的无人机来确定FY0X的编号。然后,就可以实现有效定位。 [2]
对于(3):已知无人机FY00-FY09的初始位置且初始位置存在偏差,最终需要将无人机排列成1架位于圆心、其余9架位于半径为100 m的圆上。由于FY00、FY01的极坐标分别为(0˚, 0˚)、(100˚, 0˚),符合最终对于无人机编队位置的要求,所以将它们作为发射信号的无人机。每次进行位置调整是通过选择编号为FY00和圆周上最多3架无人机发射信号,其余被动无人机根据接收到的位置信息调整到理想位置。第一次调整时,再从除FY00、FY01之外的无人机中选出一架与理想位置偏差最小的无人机与FY00、FY01 共同发射信号,根据(1)中的结论,可以调整其余7架无人机的位置,得到一个新的无人机的编队;第二次调整时,再次重新从除FY00、FY01之外的无人机中选出一架与理想位置偏差最小的无人机与FY00、FY01共同发射信号,根据(1)中的结论,可以调整其余7架无人机的位置,又得到一个新的无人机编队……不断重复上述操作,直到我们得到的无人机编队中无人机的位置与理想位置的偏差在我们可接受的范围内 [3] 。此时,我们认为在小于0.001的范围内误差下无人机的排列为1架位于圆心、其余9架位于半径为100 m的圆上。
2.2.2. 问题2 分析
对于问题2,无人机群方式变更为锥形编队队形,且理想状态下的锥形编队满足在直线上任意两架相邻的无人机之间的距离为50 m。为了方便更好的描述无人机的位置和后续的数据处理,以FY05为原点可以较快的建立出一个平面直角坐标系,并将各个无人机的位置在该平面直角坐标系上用坐标来表示。使用纯方位无源定位则应当以两架在理想状态下的无人机为基准(我们假设FY01在飞行过程中一直保持理想状态,它恒为基准无人机),以除这两架作为基准的无人机以外的无人机中的任意一架为顶点,依次求出它与两架基准无人机连线的夹角,之后在换用其它的无人机与FY01组成基准,再次求出其余无人机与这两架基准无人机连线的夹角……由此类推,得到一个10 × 10的矩阵。当无人机相对于理想状态的位置发生了略微的偏差可以及时通过三架基准无人机及时定位,从而调整到理想位置。
3. 基于三角定位无人机纯方位无源定位问题模型
3.1. 基于三角定位无人机纯方位无源定位问题模型假设
(1) 无人机的飞行情况良好且不受到其他因素的影响,例如:天气情况、无人机自身的软硬件情况、风力的大小等;
(2) 不考虑无人机从发射信号到接受信号这一过程所消耗的时间(即不考虑时差问题);
(3) 无人机发射的信号是沿直线传递到被动接收信号的无人机的;
(4) 无人机接收到方位信息后即可调整自身位置,不考虑无人机调整自身位置的具体操作过程。
3.2. 基于三角定位无人机纯方位无源定位问题的符号说明
3.3. 基于三角定位无人机纯方位无源定位问题模型的建立与求解
3.3.1. 对于问题1中(1)定位模型的建立
本题中需要3架位置无偏差来发射信号的无人机,其中位于圆心的无人机(FY00)已经确定,需要从剩下的9架无人机中选出2架无人机来发射信号。发现该无人机编队在理想情况下(即9架无人机均匀分布在某一圆周上)呈现出对称性(如图1,此时对称轴为FY00与FY01的连线所在的直线),因此,可以认为此时FY02与FY09、FY03与FY08、FY04与FY07、FY05与FY06在这个平面上等价。同理,当对称轴为FY00与其它无人机的连线所在的直线时该结论也同样成立。
因此,从9架无人机中选出2架发射信号的无人机只有a、b、c、d四种情况,如图2所示(以对称轴为FY00与FY01连线所在的直线为例):
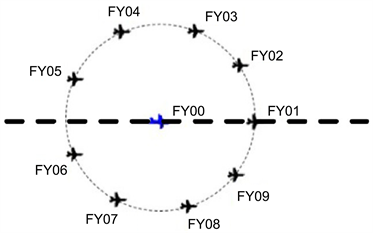
Figure 1. The situation with FY00 and FY01 lines as the axis of symmetry
图1. 以FY00、FY01连线为对称轴时的情况
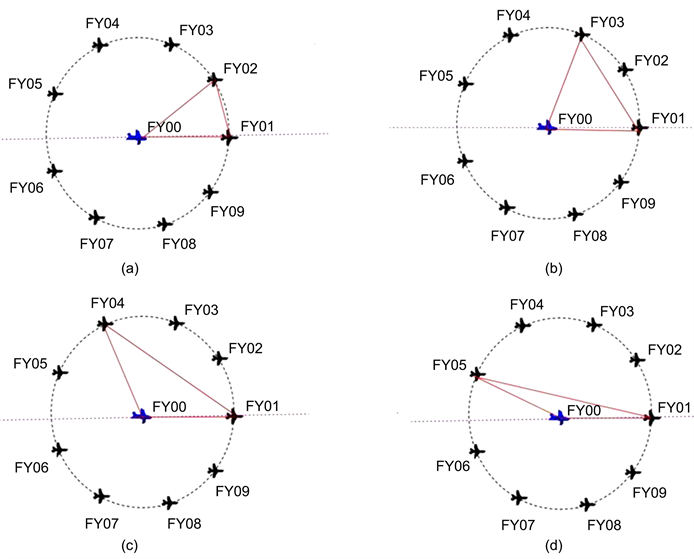
Figure 2. Four scenarios of selecting 2 drones from 9 to transmit signals
图2. 从9架无人机中选出2架发射信号的无人机的四种情况
接下来在图2中a的情况下为对FY03 (若此时FY03在理想位置)进行定位为例展开讨论:
由图2可知,情况为a时,无人机FY00、FY01和FY02为位置无偏差的发射信号的无人机。我们设FY03与FY00、FY01连线的夹角为Ða31,与FY00、FY02连线的夹角为Ða33,与FY01、FY02连线的夹角为Ða32,FY00与FY01的距离为L01,FY01与FY02的距离为L12,FY00与FY02的距离为L02,以L01为弦、Ða31为圆周角的圆的半径为R01,以L12为弦、Ða32为圆周角的圆的半径为R12,以L02为弦、Ða33为圆周角的圆的半径为R02,由正弦定理可得如下公式(1)、(2)、(3):
(1)
(2)
(3)
故选择任意两个发射信号无人机的连线为弦、以对应的夹角为圆周角可作出三个圆。由圆周角的定理及其推论可知(需要特别注意的是:这里我们讨论的无人机偏差极小,而由相关平面几何知识可知,此时满足圆周角的定理及其推论的条件):
(1) 在FY03、FY00、FY01三点所确立的圆(图3中的红色圆)中,FY03和FY03圆弧附近上的点与 FY00、FY01连线的夹角都等于Ða31,再由平面几何知识推导可知,当FY03与FY00、FY01连线的夹角Ða31′大于Ða31时,证明此时FY03应位于图3中的红色圆内,反之则位于圆外;
(2) 在FY03、FY00、FY02三点所确立的圆(图3中的黄色圆)中,FY03和FY03圆弧附近上的点与 FY00、FY02连线的夹角都等于Ða33,再由平面几何知识推导可知,当FY03与FY00、FY02连线的夹角Ða33′大于Ða33时,证明此时FY03应位于图3中的黄色圆内,反之则位于圆外;
(3) 在FY03、FY01、FY02三点所确立的圆(9架无人机正常飞行时位于的圆,即图3中黑色虚线画出的圆)中,FY03和FY03圆弧附近上的点与FY01、FY02连线的夹角都等于Ða32,再由平面几何知识推导可知,当FY03与FY01、FY02连线的夹角Ða32′大于Ða32时,证明此时FY03应位于图3中黑色虚线画出的圆内,反之则位于圆外;
(4) 三个圆弧在平面内存在一个交点,这个交点就是FY03当前的理想位置。
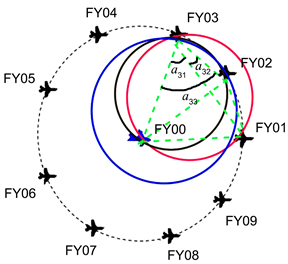
Figure 3. Schematic diagram of three circular fixed points
图3. 三圆定点的示意图
3.3.2. 对于问题1中(2)的求解
基于(1)中的定位模型可以知道:当发射信号的无人机编号已知时,只需要3架无人机来发射信号就可以实现有效定位。因此,我们先假定此时被动接收信号无人机除了接收来自FY00、FY01的信号以外还接收到了了1架编号未知的无人机发射的信号(我们将这架飞机编为FY0X),已知FY00、FY01、FY0X的位置不存在偏差,根据无源定位的原理,我们可以分别得到FY00、FY01、FY0X与被动接收信号无人机的方位角。被动接收信号无人机的位置略有偏差,因此,它与FY00、FY01以及FY0X的方位角的大小和它在理想状态下与FY00、FY01、FY0X的方位角大小相比偏差极小。我们先分别求出理想状态下,图2的a、b、c、d四种情况时,设理想状态下除FY00无人机外构成的圆为单位圆,由于均匀分布可以得出各个无人机与编号为FY00无人机的相对位置并用坐标表示,通过坐标可以求出任意角两边的向量,通过公式(4)、(5):
(4)
(5)
并将数据进行处理后得到一张数值表(表4)。再将先前得出被动接收信号无人机与FY00、FY01、FY0X的方位角信息与数值表上的数据进行差值比较,当差值最小时,数值表上相对应的数据就是该被动接收信号无人机在理想状态下与FY00、FY01、FY0X的方位角信息,但是,因为无人机编队在理想状态下存在对称性(如图4所示,对被动接收信号无人机FY05来说,以FY05与FY00的连线为对称轴,FY07与FY03向FY05发射信号的角度相同),我们难以判断此时FY0X的具体编号。为了确定FY0X的具体编号,我们还需要一架发射信号无人机。这样我们便可以将问题(2)转化为(1)来求解:除FY00和FY01外,还需要2架无人机发射信号就可以实现对无人机的有效定位。
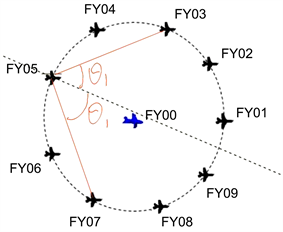
Figure 4. Proof that three drones cannot determine their numbers
图4. 证明三架无人机无法确定编号
3.3.3. 对于问题1中(3)模型的建立与求解
(3)中模型的建立
设存在一个ΔABC (如图5),已知
,D为AB的中点。
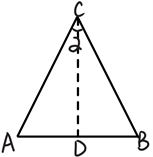
Figure 5. Schematic diagram for calculating the coordinates of the center of a circle
图5. 求出圆心坐标的示意图
由正弦定理可得公式(6)、(7):
(6)
(7)
又因为D为AB的中点,设
,所以:
AB的垂直平分线CD的方程为:
(8)
即
(9)
又有
(10)
(11)
联立(10)、(11)式可知
(12)
根据公式(12)可求出x的值,再将x的值代入公式(9)得出y的值。由此便可得出ΔABC的外接圆的圆心。
得知圆心坐标以及通过正弦定理得出半径从而得出圆的方程,通过联立两个圆的方程从而得出两个圆的交点坐标。将两个交点坐标和接收信号的无人机调整位置前的坐标进行对比。同接受信号的无人机相近的交点坐标即为此无人机调整后的坐标。
(3)的求解:
将表1的数据进行处理后得到无人机位置(如图6)发现编号为FY00与编号为FY01 的无人机不存在偏差,可作为发射信号的无人机。
又知道各个编号无人机的实际理想位置,在除编号为FY00和编号为FY01以外的无人机中,依据该无人机的与理想位置的偏差寻找出偏差最小的无人机,将其确定为发射信号的无人机。
第一次调整时,选择编号为FY00、FY01、FY02三架无人机发射信号,根据(1)中的结论,可以调整其余7架无人机的位置,得到一个新的无人机的编队,新的无人机的位置信息如表1所示;具体位置如图7所示:
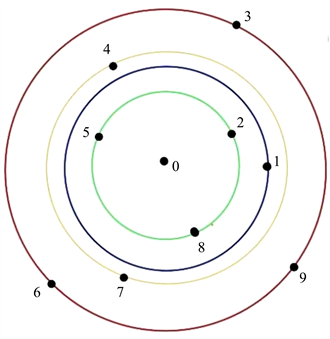
Figure 6. Distribution of drones in Table 1 of the question
图6. 题中表1中无人机的分布情况
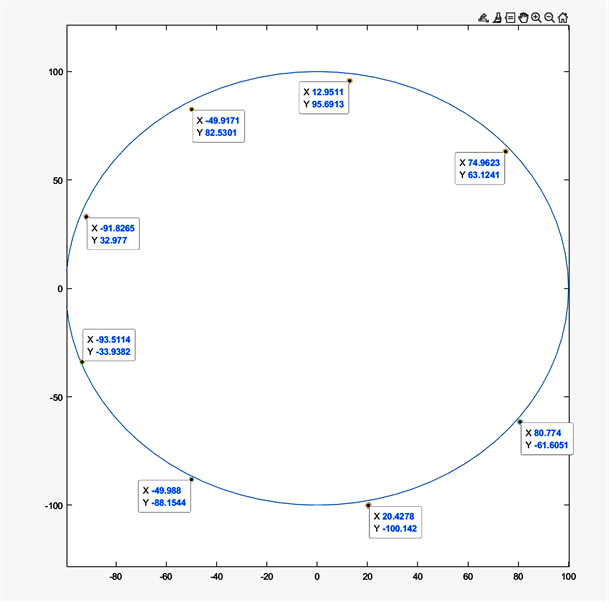
Figure 7. Schematic diagram of drone position after the first round of adjustment
图7. 第一轮调整后无人机位置示意图

Table 1. UAV information in the new position after the first position adjustment
表1. 第一次位置调整后新位置下的无人机信息
第二次调整时,再次重新从除FY00、FY01之外的无人机中选出一架与理想位置偏差最小的无人机与FY00、FY01共同发射信号,由表1可知,FY06的位置偏差最小,根据(1)中的结论,可以调整其余7架无人机的位置,又得到一个新的无人机编队,新的无人机编队位置信息如表2所示;具体位置如图8所示:
Table 2. UAV information in the new position after the second position adjustment
表2. 第二次位置调整后新位置下的无人机信息
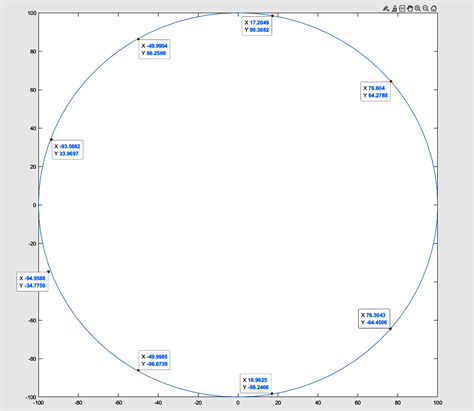
Figure 8. Schematic diagram of drone position after the second round of adjustment
图8. 第二轮调整后无人机位置示意图
第三次调整时,再重新从除FY00、FY01之外的无人机中选出一架与理想位置偏差最小的无人机与FY00、FY01共同发射信号,由表1可知,FY02的位置偏差最小,根据(1)中的结论,可以调整其余7架无人机的位置,得到一个新的无人机的编队,新的编队无人机位置信息如表3所示。此时每个无人机的位置偏差小于0.001,则认为全部无人机均已回到理想位置如图9所示,调整方案完毕。
Table 3. UAV information in the new position after the third position adjustment
表3. 第三次位置调整后新位置下的无人机信息
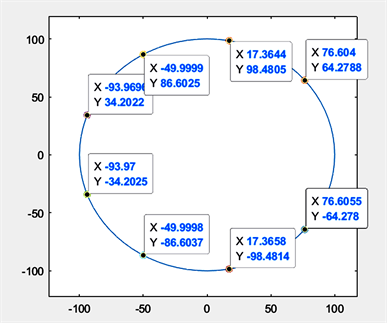
Figure 9. Schematic diagram of drone position after the third round of adjustment
图9. 第三轮调整后无人机位置示意图
3.3.4. 对于问题2的求解
本题中首先需要建立一个平面直角坐标系来方便描述各无人机的位置信息,以FY05为原点可以较快的建立一个平面直角坐标系。无人机飞行编队的阵型为一个锥形,因此可以以锥形的一个顶点为基准点来为后续定位做准备。由(1)可知,为了实现有效定位,作为基准点的无人机必须编号已知且位置无偏差。假定以FY01为此基准点(FY01在后续步骤中恒为一个基准点),再任选一架无人机作为另一个基准点,就可以求出其它被动接收信号无人机与这两个基准点连线的夹角,之后重新选一架无人机作为一个新基准点(已经当过基准点的无人机不再选择),再一次求出其它被动接收信号无人机与这两个基准点连线的夹角……重复上述操作,得到一个15 × 15的矩阵。由(1)可知,三个编号已知且位置无偏差的无人机可以实现有效定位,对矩阵中的数据进行处理,可以得到各被动接收信号无人机的位置信息和在理想状态下的位置信息,从而在被动接收信号无人机出现位置偏差时调整其位置。
3.4. 基于三角定位无人机纯方位无源定位问题模型优缺点与改进方法
3.4.1. 模型的优缺点
(1) 在问题1的(3)和问题2中运用到了递归模型,递归模型通常是将一个问题分解成若干个相同的较为简单的子问题并最终得到一种理想结果以解决问题。在问题1 (3)和问题2中,都通过平面几何的相关知识得到了求解其子问题的方法:问题1 (3)需要不断地从剩余的8架无人机中选出一个距离圆周偏差最小的无人机与另外两架处于理想位置的无人机共同发射信号帮助其它无人机进行位置调整;问题2中,也需要不断地选出无人机与事先设置的定点组成一个基准,从而计算得出各个无人机的方位角信息。
(2) 递归模型虽然简单有效,但是因为它的原理是重复大量简单的运算,所以它在计算过程中可能存在大量的冗余运算,大大消耗了使用者的时间,算法的效率较低。
(3) 由于问题2与问题1的相似性,对于问题2中仅仅得出15 × 15的矩阵,却未对15 × 15的矩阵进行数据分析,也未像问题1一般对无人机具体位置的表示进行详解。
3.4.2. 模型改进的方法
(1) “空间换时间”策略:将递归算法的高冗余属性加入到一个数组中去。
(2) 二分策略:采用二分策略跳过无用的计算从而提升算法的效率。
NOTES
*通讯作者。