1. 引言
机械传动技术是机械工程领域的重要分支,制造业的核心就是传动技术 [1] 。现在使用的机械设备还普遍使用传统形式的齿轮,传统接触式齿轮可以实现恒定的传动比、运行平稳,但在传动过程中存在接触产生摩擦和磨损、需要增加润滑和密封系统、运行过程中噪音大等缺点,这些问题不仅使设备能耗增加还对附近的生产环境产生污染 [2] [3] [4] 。
机电集成电磁蜗杆传动是一种利用磁铁的特性,结合电机学、电磁学和机械学而发展起来的一种新型非接触传动形式——电磁蜗杆传动 [5] ,与普通的蜗轮蜗杆传动相比较有很多优点。电磁蜗杆传动系统由蜗杆集成系统和蜗轮集成系统组成,系统启动力矩由蜗杆上的通电电枢提供,带动蜗轮上的永磁体运动,从而实现力矩输出,蜗轮蜗杆圆周运动同时在三个平面上进行,是由蜗轮蜗杆之间非接触磁力啮合完成,因而可以很好地提高系统效率,系统无需润滑、噪声小,因而成本降低很多;可以通过调节通电电流而达到调速目的;电磁蜗杆传动系统制造得相当紧凑,蜗轮蜗杆相啮合半径可根据实际需要调节,蜗轮蜗杆相啮合的气隙可以调节 [6] 。
对于电磁蜗杆传动这种新型传动系统本质上来说就是磁场之间相互作用,利用N、S极之间的相斥力或相吸力来传递扭矩的,因此磁场分析在其研究中具有重要地位。磁路解析分析法运用数学知识易于理解,在磁性装置的初步设计中较为实用,从原理上保证了新型磁路设计与计算的可能性,但实际上电磁蜗杆传动磁场问题是很复杂的,尤其是在实际运行过程中情况更为复杂,各参数之间的关系具有非线性,磁路解析分析还要结合有限元分析,用于电磁蜗杆传动的电磁场设计计算 [7] [8] 。
2. 电磁力计算模型
本电磁蜗杆传动的实现是以磁极啮合为基础,磁极之间的相互作用通过磁场来实现。电磁蜗杆传动的磁场包括通电导线产生的电磁场和永磁体产生的永磁磁场,在大多数情况下它们都可以作为恒定磁场问题来研究。如图1所示为系统电磁力计算模型,电磁蜗杆传动蜗轮与环面蜗杆啮合工作时,蜗杆相当于一个变磁阻的铁芯线圈,其主磁路由铁芯和气隙组成,具体参数如图所示,Lq为气隙的径向尺寸,Aq为气隙面积,ϕ为磁路的磁通,f为径向电磁力,Ld主磁路计算长度,α为计算角度 [9] [10] 。
3. 空气隙中的电磁力
空气隙中的电磁力的计算是很复杂的,不可能作精确的理论计算。因此对图1所示模型要进行如下假设 [11] :
1) 在电磁蜗杆、蜗轮和气隙中磁场是分段均匀的。
2) 铁心的磁感应强度不能高于其饱和磁感应强度,即处于不饱和状态。
3) 假设磁通全部流过铁心,不考虑漏磁和磁滞的影响。
4) 蜗杆上的线圈和电源之间没有电能交换。
5) 忽略铁芯磁阻误差。
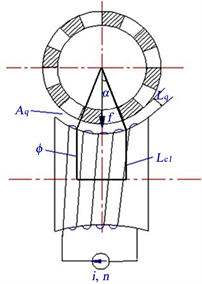
Figure 1. Equivalent magnetic loop analysis
图1. 当量磁路分析图
当蜗杆与蜗轮的气隙很小时,在以上几点假设情况下推导出空气隙中的电磁力,可以很好地满足要求。根据Maxwell吸引力公式,电磁蜗杆、蜗轮之间的吸引力为
(1)
对图1所示的模型采用磁路计算方法,分段均匀的磁路长度用铁芯平均长度Lcl来代入,Lq为气隙宽度,根据安培环路定律可得
(2)
因为
,所以可得
由于忽略磁漏,因而有
,由于
为简化计算,可认为
,所以上式简化为
将其代入吸引力公式可得每一单极磁极的电磁力
(3)
考虑到蜗杆对蜗轮的力是以夹角α形式作用于蜗轮上,所以作用于蜗轮切向磁场吸引力为
,其中αi为磁极与铅垂线的夹角(˚)。由于蜗杆铁芯用的是硅钢片,其相对磁导率μ2r在数值上远大于Lcl,所以式(3)可以简化成
所以有
(4)
从式(4)可以看出总的磁场吸引力与气隙、通电电流、参与啮合的磁极数量及其与铅垂线的夹角有关。初选参数列于表1中,根据式(4)进行Matlab仿真可得图2。
从仿真图中可以看出:
1) 不同磁极的电磁力分布图形大致一样,当蜗轮磁极数增加时,其啮合磁极数也增加,因而电磁力大小也随着增大。
2) 影响电磁力大小的主要有蜗杆线圈的通电电流和空气隙。电磁力的大小主要受空气隙的影响比较大,蜗杆线圈的通电电流对电磁力的影响在其取值小的时候比较明显,取值大时则对电磁力影响不大。
3) 当空气隙由0.2 mm增加到0.4 mm时,电磁力迅速减小,当空气隙由0.4 mm增加到1 mm时,电磁力缓慢减小。
4) 当通电电流由0.5 A增加到1.5 A时,电磁力随着电流的增加而迅速增加,当通电电流由1.5 A增加到5 A时,电磁力增加的非常缓慢。
4. 系统输出力矩
作用于蜗轮切向磁场吸引力fq求解之后,系统输出力矩Tn可以计算如下
初选模型参数:蜗轮半径R = 60 mm,蜗轮与蜗杆中心距为a = 120 mm,蜗杆喉部半径r = 55 mm,蜗杆对蜗轮的包角为90˚,当NI = 100,气隙Lq = 0.2时,可计算出系统输出力矩,见表2。

Table 2. The output torque of the system
表2. 系统输出力矩值
比较安培环路定律方法计算出的最大扭矩值与用磁路法计算出的最大扭矩值可以看出,在磁极数N大于等于12时两种方法之间的误差小,当磁极数N小于12时,两种方法误差比较大,这是因为安培环路定律方法计算时用等效的宏观电流来代替永磁材料本身的磁性,当磁极数减少以后电流密度变化很大,磁通密度变化也大,因而计算误差就会增大。用磁路法计算时,相关假设等因素都在磁极数减少以后产生很大误差,假设磁性材料是各向同性且均匀的媒质,当磁极数减少以后气隙中的磁场不均匀程度明显,在磁极边缘有磁极效应,磁极之间有耦合现象产生,磁漏增加,这些因素导致计算结果误差增加。
5. 电磁蜗杆传动二维有限元分析
蜗轮齿的装配形式主要有两种,嵌入式和凸起式,两种形式磁场强度值的大小相差不多,因为电磁蜗杆系统的工作区在永磁体外侧,蜗轮蜗杆之间啮合区域的气隙很小,与凸起式相比嵌入式更适合,综合考虑磁力线分布情况和制造装配方便,选用嵌入式装配方式。每个磁极充磁可以采用径向也可以采用径向切向交替充磁,径向切向交错充磁布置时磁感应强度和磁力线分布如图3所示,其中N = 6、10、18时磁感应强度方向有两种情况,但磁力线一致。径向充磁布置时磁感应强度和磁力线分布如图4所示。
根据以上图表可以得出以下规律:
1) 从磁力线分布图上可以得出:磁通流线密的地方表示该处磁感应强度大,流线稀疏的地方表示该处磁感应强度弱,并且和磁感应强度分布规律相对应,磁通流线主要集中分布于磁体附近,并且以永磁体径向中心线为对称分布,在中心线最外侧处磁通流线最密。
2) 从磁感应强度分布图中可以看到:永磁体附近的磁感应强度数值大约在0.2 T~1.5 T左右。其中有黄线和红线的地方,表明该处的场强较强,而出现场强较强的地方主要在两块永磁体交界处,这是由于在角点处没有做钝化处理的结果。磁感应强度在稍远于永磁体附近的区域中是蓝色区域,表明场强较弱。在磁体外侧边缘的区域中磁感应强度大多为绿色和黄色,表明该处的场强较强,这也是电磁蜗杆传动的工作区,为了避免磁场强度衰减过快,蜗轮与蜗杆之间气隙尽量小。
3) 通过不同充磁方式情况下磁感应强度最高值和最低值比较来看:径向切向交错充磁与径向充磁的最高值相差不多,总体上是径向充磁数值高点;径向切向交错充磁时,不同极数其最小磁感应强度值相差很多,最少相差几十倍,最多相差几万倍,因此在比较图上舍去了最大数值(N = 4、N = 6时),径向充磁的最小值比径向切向交错充磁最小值小的很多。
4) 从漏磁区的磁力线分布可以看出:随着永磁体个数的增加,漏磁区的范围减小,因此在系统设计时蜗轮尽可能采用较多的永磁体数,较多的永磁体数也有利于增加蜗轮和蜗杆的啮合齿数,从而增加力矩输出。
6. 结论
本文建立了机电集成电磁蜗杆传动的电磁力计算模型,利用电磁学理论推导出空气隙中的电磁力计算公式,得出与电磁力相关的参数变化曲线;采用安培环路法和磁路法计算了系统输出力矩;推导出了均匀磁化情况下不同磁极的磁场强度计算公式,并建立了二维磁场模型,用ANSYS软件分析了不同磁极的磁场强度分布和磁力线分布,研究结果表明:
1) 为了提高永磁体的利用效率,必须尽量减小气隙,气隙控制在1 mm范围为好。随着磁极数增加,磁漏区范围也越小,所以实际应用中要尽可能采用数量多的磁极。随着磁极数增加,每个磁极的磁通密度也增加,因而传递的力矩也越大。
2) 为避免磁场强度衰减过快,蜗轮与蜗杆之间气隙应该尽量小,气隙控制在1 mm范围为好。
3) 电磁蜗杆传动工作区域是永磁体外侧,内侧不是工作区,不用考虑最小值取值的蓝色区域,综合考虑永磁体采用径向充磁方式。
4) 系统设计时蜗轮尽可能采用较多的永磁体数。
本文研究的结果是系统加工制造的依据,为进一步研究工作提供理论依据。在进行系统参数设计时,应该根据上述结论设计出合理的传动系统参数。
基金项目
河北省高等学校科学技术重点研究项目(ZD2016048)。