1. 引言
切换系统是由一族子系统和描述它们之间联系的切换规则组成的混杂系统 [1]。切换系统在实际工程系统中应用很广泛,如通讯系统、电力系统、航空航天系统、化工系统、经济系统、交通系统、网络控制系统等 [2] [3] [4],近年来,切换系统已经成为广大学者的研究热点 [5] - [16],而带有记忆的控制器的引入更加符合实际,且为控制的可行性提供更好的自由度,因而对此类问题的研究更具有实际应用及理论价值。文献 [17] 对线性切换系统的稳定性分析进展进行了综述。文献 [18] 利用广义Lyapunov方法研究了一类具有多状态不确定性的切换广义系统的鲁棒无源控制问题。文献 [19] 利用Lyapunov-Krasovskii泛函研究了一类时变时滞的不确定性Lurie动态输出反馈
控制问题。文献 [20] 研究了切换广义系统的
静态输出反馈和动态输出反馈问题。文献 [21] 通过构造Lyapunov-Krasovskii泛函,研究了一类带有多时滞摄动下的非线性切换系统的稳定性分析和切换律的设计问题。文献 [22] 通过引入新颖的Lyapunov-Krasovskii泛函,分析了非线性切换延迟系统的问题。A. V. Platonov在文献 [23] 中研究了一类非线性切换系统的稳定性问题。文献 [24] 通过构造状态采样数据控制器,考虑了一类切换非线性系统的异步切换下的全局镇定问题。在文献 [25] 中王荣豪等人对具有异步切换的非线性切换系统的有限时间稳定性和稳定性问题进行了研究。
现有的文献中,很少有涉及到多状态变时滞广义Lurie切换系统反馈问题,为此本文将研究具有参数不确定性时变时滞多状态Lurie切换广义系统的无源控制问题,通过运用Lyapunov-Krasovskii泛函、线性矩阵不等式以及文献 [26] [27] 所提供的不等式,进一步考虑了带有记忆的鲁棒无源 控制的综合问题。考虑带有记忆的控制器可以使系统的稳定性分析及控制综合拥有了更多的自由度及更好的合理性。并利用线性矩阵不等式形式得到了Lurie切换广义系统渐近稳定且严格无源的充分条件。
2. 系统的描述和准备
考虑以下含参数不确定性的带有记忆的变时滞广义Lurie切换系统:
(1)
其中,
为系统的被控对象状态变量,
为控制输入状态变量,
为控制输出变量,
为分段常值切换信号,且
表示第i个子系统在t时刻被激活,
为外部干扰,且系数矩阵
,
,
,
,
,
,
,
,
,
,d为正实数,
,
表示时变的状态时滞,并且时滞变化率满足
,
。
,
,
为参数不确定性矩阵,且满足关系式
。
,
,
,
,
是具有Lebesgue可测的未知矩阵,满足
;
表示非线性向量,且位于有限的霍尔维茨角域内,
(2)
其中,
为常数,记
,
,
设计带有记忆的输出反馈控制器为
且
,
,
。
系统(1)的闭环系统:
(3)
记
,
,
则系统(3)变为:
(4)
定义1:使得广义Lurie不确定切换系统(1)具有鲁棒无源的。如果:
1) 当外部扰动输入
时,闭环系统是渐近稳定的。
2) 在系统初始条件
时,对于所有非零的
,使得无源不等式成立
,
;若无源不等式换为严格不等式,则称广义Lurie切换不确定性系统(1)是严格无源的。
在分析和推导的过程中,我们会用到以下的引理。
引理1 [26] :给定适当维数的矩阵Y,D和E,其中Y是对称的,则
,对所有满足
的矩阵成立,当且仅当存在一个常数
,使得
。
引理2 [27] (Schur补引理):对给定的对称矩阵
,其中
,以下三个条件是等价的:
(I)
;
(II)
;
(III)
。
引理3 [27] :对于任意适当维数的矩阵X,Y,且存在一个常数
,有
3. 带记忆的鲁棒无源性分析
定理1:对于闭环系统(4)如果
,
存在可逆矩阵
,
,
,
和矩阵
,
,且
正实数
使得下面不等式成立:
(5)
其中
,*表示关于对角线的对称矩阵部分,则此时Lurie切换广义系统(1)在任意切换规则下对所有扰动是渐进稳定且严格无源的。
证明:先证在外部扰动
时,闭环系统(4)是渐近稳定的。
构造Lyapunov-Krasovskii泛函如下
(6)
其中
,
,
。记
,及
,
对
沿闭环系统(4)求导,可以得到
(7)
由(2)式霍尔维茨角域可以等价表示为
,可以导出
(8)
所以由引理3及(8)式可以得到
(9)
所以由
,
以及(9)式可以得到
(10)
由引理3可得
(11)
将(11)式代入(10)式得
(12)
记
所以
其中
由(5)式及Schur补引理知,
所以
,通过Lyapunov稳定性理论得到闭环(4)是渐近稳定的。
下证闭环系统(4)满足的无源性。
其中
,
而根据矩阵不等式(5)可以得到
则
取
,此时满足定义1,所以Lurie切换广义系统(1)是渐进稳定且严格无源的。
4. 带有记忆的无源控制器设计
定理2:如果
,
对于给定标量
,
,
系统(1)是具有鲁棒无源可切换镇定的。如果存在非奇异矩阵
,
,
,
有下列矩阵不等式成立:
(13)
使得控制增益矩阵为
,
且
,
,
是系统(1)的鲁棒无源记忆反馈控制器。
证明:由定理1知,
(14)
将不确定项
,
,
,
代入(14)式得
(15)
此时
记
则式(15)等价为
(16)
由引理1可知,要使不等式(16)成立,当且仅存在一个常数
(17)
整理(17)式可得
(18)
由Schur补引理知(18)式等价为
(19)
记
,
,
,
,其中
对不等式(19)左乘
右乘
得到等价的线性化不等式(13),定理2证毕。
5. 数值仿真
考虑以下系统
系数矩阵如下:
,
,
,
,
,
,
,
,
,
,
,
,
,
,
,
,
,
,
,
,
,
,
,
,
,
,
,
给定
,
,
由(13)式及MATLAB求出相应的可行解为:
,
,
,
,
,
,
,
,
,
,
,
,
,
,
,
,
,
控制器增益矩阵
,
,
,
,
,
两子系统的状态轨线对应的仿真曲线图如图1,图2。

Figure 1. The state trajectory of subsystem 1
图1. 子系统1的状态轨线曲线图
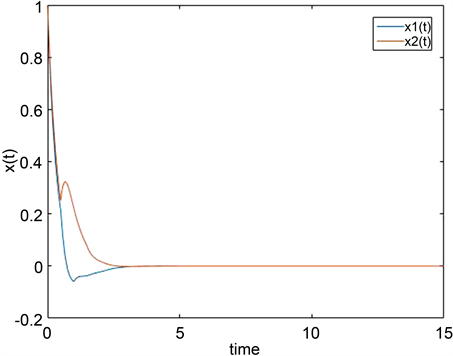
Figure 2. The state trajectory of subsystem 2
图2. 子系统2的状态轨线曲线图
通过子系统的仿真曲线图,我们可以很明显的得到:在选取的切换信号
作用下,可以保证系统(1)为整体稳定的。
6. 结论
本文综合利用Lyapunov-Krasovskii泛函和矩阵不等式方法,研究了一类不确定性多状态变时滞广义Lurie切换系统及带有记忆的反馈控制器的鲁棒无源 控制问题,通过设计具有记忆的反馈控制器,保证了闭环系统的鲁棒渐近稳定,同时给出了在严格无源要求下可行解存在的充分性判据,最后的结果运用线性矩阵不等式的形式给出,通过数值仿真例子验证了所得结果的可行性。
基金项目
国家自然科学基金资助项目(11561053);内蒙古师范大学十百千人才工程项目(PCRY-2-2012-K-037);内蒙古师范大学研究生科研创新基金资助项目(CXJJS18070)、(CXJJS19096);内蒙古自治区研究生教育创新计划资助项目(S2018111966Z);内蒙古自然科学基金项目(2019BS01002);内蒙古高等学校科研研究项目(NJZY19022)。