1. 引言
某水电站装有三台13.5万千瓦轴流转桨式水轮发电机组。轴流转桨式水轮机适用于水头或负荷波动较大的低水头电站,其转轮叶片可与导叶协联调节,在调节导叶开度的同时,可按预先设定的协联关系调节桨叶的角度,以保证水轮机始终在高效率区运行 [1],是典型的双调型机组。
一般水轮机的协联关系由制造厂家根据模型试验的成果制定,由调速器通过程序自动协联,但是由于模型试验的偏差及安装和零部件加工的误差,再加上电站运行机组经过A级检修,机械结构反复拆装,轮毂体及轮叶汽蚀,其得到的协联关系往往与真机运行情况存在一定的差异,造成机组并非在最优协联关系下运行,影响了水轮机的效率及运行的稳定性 [2],因此研究双调水轮发电机组最优协联特性就具有非常重要的意义 [3]。
本文针对双调型轴流转桨式水轮机特性提出了一套能够准确测量最优协联特性的试验方案,在不影响测量结果的前提下,精简试验测量参数,简化参数推倒,计算过程。经过试验结果验证,该方案具备一定的有效性和先进性。
2. 本文主要研究内容
1) 某水电站在不同水头下水轮机组的协联特性,确保机组在特性好的协联关系下运行。
2) 水轮机组在某一协联特性下,有功功率与指数效率的关系,由此确定机组的高效率运行区间。
3) 在水轮机的机械结构导致无法直接测得水轮机真实流量时,通过相对效率试验间接求得水轮机相对效率 [4] 的方法。
试验过程中对某水电站1号机组在33 m、33.5 m、34 m、35 m、36 m、36.5 m毛水头下进行导叶与桨叶的协联优化研究,利用1号机组的试验结果,在2号机组进行35 m、36 m毛水头下的验证测试;最后在3号机组进行33 m、34 m、35 m、36 m毛水头下的综合验证测试,得出某水电站3台机组的最终优化协联曲线。
3. 最优协连点试验方案
水轮机的最优协联工况即最佳工作状态,为保证水轮机有最高效率,桨叶姿态需顺应水轮机流道的流态。在此状态下,水轮机气蚀最轻、操作桨叶所需油压最低、震动最小。要确定最优协联工况则要在效率试验前得出试验机组的最优协联关系,随后由最高效率点确定最优工况点,此时,通常采用相对法效率试验法来消去未知的效率的绝对值和蜗壳流量系数K。
而流量的相对值测定是通过在水电站中常使用蜗壳差压法测量水轮机流量,它也是最简单的一种的方法。它的工作原理是由于蜗壳中心线弯曲,当具有一定流速的水流流经蜗壳时,水流在蜗壳弯曲的通道上产生离心力,从而在蜗壳内外缘产生压力差。在截面积已成定值的蜗壳某截面来上,水流流速影响着压力差的大小,即水流平均流速的大小正比于流经该截面的流量,当测压点选择得当时,蜗壳流量计具有较高的测量精度。而且蜗壳流量系数K值具有不随导水叶开度和水头变化而变化的性质,这给K值的率定和使用带来了很大的方便 [5]。
在某电站收缩管流道任取两个测量断面,指数流量Q*可表示为:
(1)
式中,K为蜗壳流量系数,h为两个测流断面的压力差值。
水轮机效率公式以指数效率
可表示为:
(2)
式中:
—水的重度;
H—机组的工作水头;
N—发电机有功功率;
—水轮机指数效率;
—发电机效率。
在试验选定的工况点下,指数效率
与最高指数效率
的比值即为相对效率
:
(3)
式中:
、
、
均为最高指数效率下的发电机有功功率;机组工作水头流道差压值。
由式(3)可知,相对效率与指数效率在某一确定的工况点下绝对效率与相对效率相差常数倍,它们的曲线形状相同但是坐标不同,最优协联点则可通过定桨试验中测得的最高相对效率值或指数效率值确定,本试验则是据此利用指数效率确定最优协联点 [6]。
3.1. 水头Hdj的计算
水轮机的工作水头在试验过程中受上游来水流量,运行机组正常水耗及试验机组导叶开度改变等因素的影响不断变化,故将在每个固定导叶开度测得的水头值取其平均值以减小试验误差。即:
(4)
式中
> 为某个导叶开度下的计算水头,
为某个导叶开度下实测的工作水头,n为测量次数。
3.2. 流量
的计算
某个工况点下测得的测流断面间压差值为
,据式(1-1)和(1-6),则指数流量
为:
(5)
蜗壳流量系数K可在计算时消去,则式(5)中K取1。
由相似理论流量换算原则可知,某个工况点下计算流量
可换算为:
(6)
式中
为某工况点下的计算水头,
为某工况点下的实际工作水头。
3.3. 功率Nd的计算
由水轮机相似理论可知,计算功率
为某工况点下测得的实际功率
换算到计算水头 下得到的机组有功功率:
下得到的机组有功功率:
(7)
3.4. 水轮机指数效率
与水轮机相对效率
据式(2),可求得水轮机指数效率
,据式(3),可求得水轮机相对效率
。
4. 试验参数的测定
4.1. 水位及机组工作水头
试验利用的水位主要有上游水位、拦污栅后水位、下游水位,水位测量采用压力式水位传感器。
试验水头利用电厂安装在拦污栅后水位的平均值与尾水出口处的水位传感器测量值计算,水位监测装置事先应进行校准。试验时此参数由人工同步读数、记录。机组净水头可利用安装在蜗壳进口处的压力变送器与尾水管出口处的压力变送器测得。
试验水头采用固定上游、尾水位,利用调整其它机组出力的方法进行控制,水头控制表如表1所示。
发电机有功功率﹑无功功率及功率因数利用机组监控系统记录(功率变送器的精度要求为0.2级以上)。导叶开度﹑桨叶开度通过机旁盘处的调速器电柜获得。并由监控系统和人工分别记录。蜗壳采用EJA110A型智能差压传感器测量,并送至监控系统,由计算机监控系统记录读取蜗壳差压。
4.2. 机组振摆测试
采用水力机械综合测试系统,测试机组大轴摆度(上导、下导、水导);机架振动(上机架+X水平、上机架+X垂直、上机架+Y水平、下机架+X水平、下机架+X垂直、下机架+Y水平);顶盖振动(顶盖+X水平、顶盖+X垂直)等。
5. 现场测定协联曲线
水轮机制造厂提供调速器现用协联曲线、数据表分别如图1、表2所示。

Figure 1. Coconnection curve provided by turbine manufacturer
图1. 水轮机制造厂提供的协联曲线

Table 2. Data sheet provided by turbine manufacturer
表2. 水轮机制造厂提供的数据表
本试验所用数据采集为水力机械综合测试系统和计算机监控系统测定,导叶开度、桨叶开度和导叶接力器行程、有功、蜗壳差压等相关量由计算机监控系统记录。试验以拦污栅栅后与尾水水位差作为毛水头,以蜗壳进口压力折算的水位与尾水水位差作为净水头。
协联状态下的试验主要是测试并获得水轮机处于现用协联关系条件下运行时的出力及效率特性,而非协联状态下的试验主要是测试并获得水轮机在脱离协联关系处于定桨运行时的出力及效率特性,并由此得到水轮机的最优协联关系。
协联状态下的试验和非协联状态下的试验同时进行,试验时注意上下游水位的变化情况,在改变试验机组导叶开度进行不同测点试验而导致水头发生变化时,中控室运行值班人员通过调整其它机组负荷方式来保证机组运行水头不变,控制试验水头偏差不超过平均水头的±2%。根据当时试验水头,机组在现用协联关系条件下并网运行,将导叶开度依次调整为:30%、35%、40%、45%、50%、55%、60%……等(具体的导叶开度可根据当时的试验水头而定),一般取6~10个工况点。调整好导叶开度后,各工况均在机组负载稳定3~5分钟后对各测量参数进行读数记录。每个导叶开度下的试验读数记录一分钟,记录完毕后改变桨叶开度进行非协联状态下的试验。
非协联状态下的试验,接着协联状态下的工况继续进行。监控系统先发令将导叶至试验开度后,在上位机退出1号机组PID调节,将桨叶控制切方式切至手动,使机组调速器脱离原有的协联关系,分别在此桨叶开度的左、右两侧,每次逐步改变桨叶开度3%~10%,每侧各取3个试验点,待试验工况稳定后对各测量参数进行读数记录,每个试验工况同样读数记录一分钟。当找到该导叶开度下最优机组工况或者机组振摆超标时停止试验,手动调整桨叶至协联开度,然后将桨叶控制方式切自动,投入1号机组PID调节,进行下一个测点的试验。所有数据都是高精度传感器获取,为了减小随机误差,每个测点同时读取3个数据取平均值作为该点的实测数据。
6. 试验结果分析
各试验水头协联状态下的“指数效率”曲线如图2所示。

Figure 2. Curve of “exponential efficiency”
图2. “指数效率”曲线图
从图2可看出,水轮机效率较高区域出现在33 m水头附近,各水头区域下的效率曲线高效区宽,调节趋势平滑。在90~130 MW负荷区间机组效率较高。
各试验水头协联状态下的“导叶开度与机组出力”曲线如图3所示。

Figure 3. Curve of “guide blade opening and unit output”
图3. “导叶开度与机组出力”曲线图
从图3可以看到,机组的出力特性线性度好,趋势明显,在机组主要运行区间和常处的水头之下,机组出力随着运行水头的提高而平顺增加,符合出力变化规律。
在各试验水头下试验前后的协联关系如表3,表4所示。
Table 3. Measured the original coassociation relationship
表3. 实测原协联关系
Table 4. Optimal coassociation relation
表4. 综合最优协联关系
通过表3与表4对比可以看出:试验优化后的各个定导工况下的最优配合桨叶开度比试验前对应水头下原协联的桨叶开度平均减小15%~20%。
各试验水头下的非协联试验得到的“实测最优协联关系”曲线如图4所示。
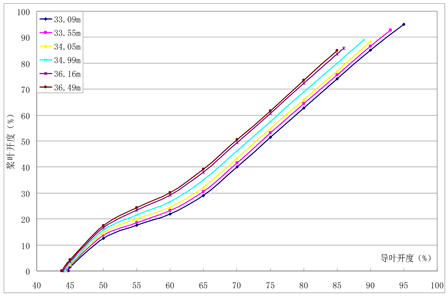
Figure 4. Final optimization curve of a hydropower station hydraulic unit
图4. 某水电站水利机组最终优化曲线
由图4某水电站水利机组最终优化曲线可以看出:优化后的协联曲线与图1的原曲线相比各个水头下曲线趋势近似一致,桨叶随动开度更小,水头切换跳动幅度小,机组运行更加稳定。
7. 结论
本文主要对某水电站水力机组协联曲线做出优化方案,并在水电站现场进行了验证。通过本次优化结果可以发现,本试验方案中采用的相对效率试验法和蜗壳测流法是轴流转桨式水轮机协联优化试验中行之有效的方法,优化出的协联曲线与某水电站的机组工况相匹配,协联关系趋势变化平缓,桨叶随动开度明显减小,机组高效率区宽阔清晰,达到了某水电站开展此次优化试验的目的,在电站的经济效益和安全稳定方面,产生积极影响。
基金项目
广西自然科学基金联合资助培育项目(2019GXNSFAA245019)。