1. 引言
H∞控制是在H∞空间 [1] [2] (Hardy空间)通过对某些无穷范数优化而获得具有鲁棒性能的控制器的一种理论。其目的为当名义模型存在不确定性时,如何利用名义模型来设计控制器,使所设计的控制器在能控制被控对象的同时,使某一目标函数的范数H∞为最小。也就是使控制器具有较好的鲁棒性。H∞就是现代控制理论中的设计多变量输入输出(MIMO)鲁棒控制系统的一种方法。由于工作状况变动、外部干扰以及建模误差的缘故,实际工业过程的精确模型很难得到,而系统的各种故障也将导致模型的不确定性,因此可以说模型的不确定性在控制系统中广泛存在。如何设计一个固定的控制器,使具有不确定性的对象满足控制品质,也就是鲁棒控制,成为国内外科研人员的研究课题。1981年Zames利用H∞范数作为性能指标,提出最小灵敏度控制问题——H∞控制问题 [3];1988年Zhou获得H∞控制问题的状态反馈控制解 [4];1989年Doyle等发表著名的DGKF论文,获得H∞控制问题的输出反馈控制解——H∞控制理论形成 [5]。然而H∞控制器设计却较难求解。在Matlab语言函数中也没有合适的求解函数来求解Ricatti方程,即反馈增益方程。本文采用Matlab中基于内点法 [6] 求解凸优化问题的LMI (Linear Matrix Inequality)工具箱提出了一个控制方法,并以一栋实际的结构为例,计算LMI控制算法下的地震动力反应并分析其减震效果验证其有效性。
2. LMI控制器的基本原理
系统的状态空间模型 [7] 为:
(1)
其中x是状态向量,u是控制输入,A和B分别是恰当维数的已知的常数矩阵。若采用状态反馈,则有:
。设计LMI控制器的目的就是使闭环系统
具有渐进稳定性,同时控制器具有鲁棒性。
考虑Lyapunov函数 [7]
,根据Lyapunov稳定性理论 [7] 可知,当且仅当以下不等式有可行解P > 0时,上述的闭环系统是渐近稳定的:
(2)
且
。
对(2)式两端各乘以
,得:
(3)
令
,
,
得:
(4)
因此,根据Schusr补引理 [8] 若以下矩阵不等式成立,则上式即能成立,
(5)
即上述的闭环系统是稳定的,由于(5)式是一个线性矩阵不等式 [8],可以用Matlab中的LMI求解器feasp求取可行解(X, Y),则状态反馈控制力即为
,可通过调节参数调节LMI控制器的减震效果,将其代入到有外扰(地震作用)运动方程得:
(6)
就可求得LMI控制下的运动方程的地震动力反应,检验所设计的LMI控制器的效果。
因此,求取LMI控制算法可行解的过程如下:
setlmis([]); %初始化一个不等式系统
X = lmivar(1,[2 1]); %定义矩阵变量
Y = lmivar(2,[1 2]); %定义矩阵变量
lmiterm([1 1 1 X],A,1,’s’); %描述线性矩阵不等式
lmiterm([1 1 1 Y],B,1,’s’); %描述线性矩阵不等式
lmiterm([1 2 2 X],-1,1); %描述线性矩阵不等式
lmis = getlmis; %完成写线性矩阵不等式
[tmin,xfeas] = feasp(lmis,[0,0,10,0,0],-1)%求取可行解
x = dec2mat(lmis,xfeas,X) %得到可行矩阵变量值
y = dec2mat(lmis,xfeas,Y)
K = y*inv(x) %求状态反馈控制器增益
对于被控结构的地震动力反应计算预测,则可采用的数值预测方法有Newmark法、经典四阶Runge-Kuta法等。
3. 计算实例与结果
为评价LMI算法对建筑结构的减震效果,在这里为节约评价成本采用数值预测的方法 [9],采用经典四阶Runge-Kuta法来预测建筑结构运动方程动力反应,以评价LMI算法的减震效率,为确保数值预测结果准确性采用Nmewmark法、Runge-Kuta法同时进行数值模拟,若数值结果相同则数值预测有效。

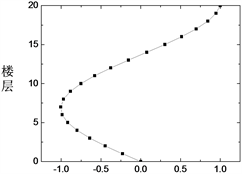
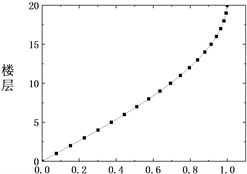 第1振型(T1 = 0.83 s) 第2振型(T2 = 0.28 s) 第3振型(T3 = 0.17 s)
第1振型(T1 = 0.83 s) 第2振型(T2 = 0.28 s) 第3振型(T3 = 0.17 s)
Figure 2. 1st, 2nd and 3rd for modal structural
图2. 前三阶振型图
建立一栋20层建筑结构模型,其模型平面图如图1所示,为方便数值模拟将其简化为20个集中质量的多自由度体系。结构每个集中质量mi = 2933 t,每层层间侧移刚度ki = 28,950,000 kN/m,其一、二、三阶振型如图2所示。阻尼矩阵采用振型阻尼比为0.05时的Rayleigh阻尼的形式 [10]。以El-Centro波为受控建筑结构外部干扰输入,并使其峰值为4.0 m/s2以检验建筑结构在8级地震下的控制效果。
从图3、图4可以看出,当
时,LMI控制算法减振效果显著。通过调节系数
可以达到调节目标减震效果的效果,随着调节系数
相应的位移、层间位移、速度、加速度减震效果也随之增加,反之,随着调节系数
的减小,相应的控制效果也随之减弱,在实际工程设计中,可根据目标建筑结构抗震设防等级选取相应级别的地震波以通过不断调节参数试算以确定其参数
。
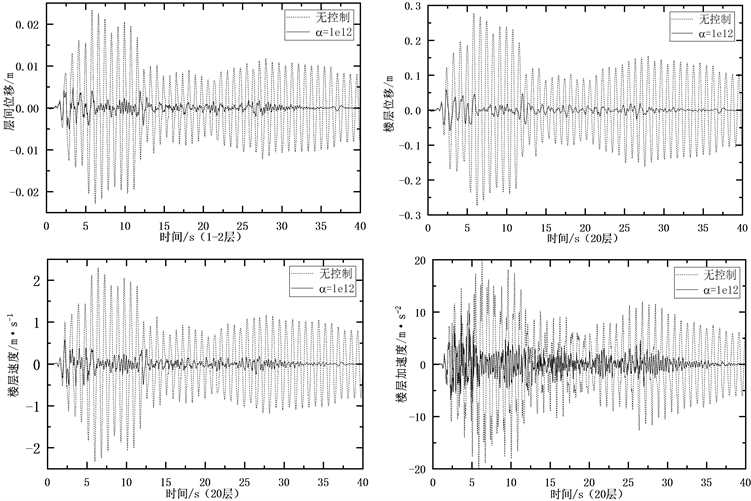
Figure 3. Time histories of structural seismic dynamic response
图3. 结构地震动力反应时程
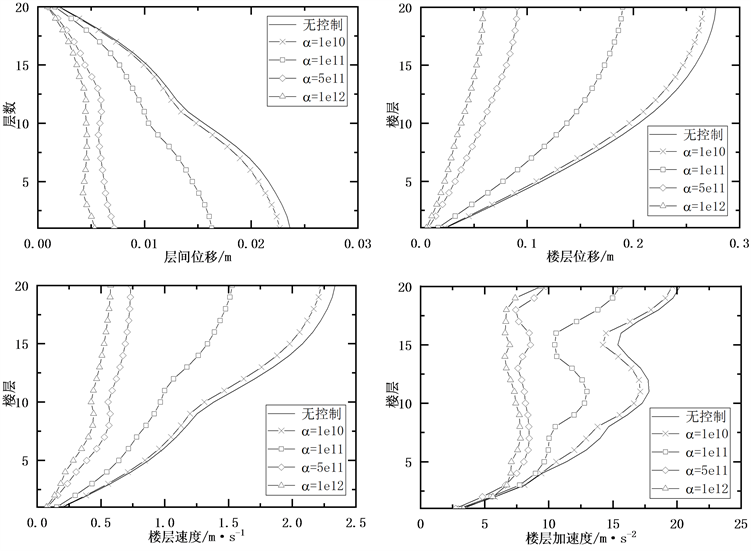
Figure 4.
vs structural seismic dynamic response
图4. 调节系数
值与结构地震动力反应最大值

Table 1. Control mode vs seismic dynamic response
表1. 控制方式与地震动力反应
注:某一控制方案的减震效率是指相对于无控制方案而言。
结合表1及图4可以看出,采用LMI控制后,随着调节系数
的增大,楼层加速度减震效果也随之增加,但底部结构的减震效果较不明显甚至出现增加建筑结构楼层加速度的情况,且在相同设计参数
,从而能够在一定程度上降低工程试算难度;在统一设计参数
下,作动器控制成本随着楼层的提高而提高,因此,最大作动器控制力在顶层,取
时,顶层控制力的幅值达到8000 kN左右,为本层楼面重量(或等效重力荷载代表值)的27.8%。
从图5可以看出,随着设计参数的增大(控制效果越好),每一楼层的作动器控制力也随之增加即意味着控制成本的增加;与LQR、IOC等经典控制算法相比,LMI算法只有一个设计参数,从而能够在一定程度上降低工程试算难度;在统一设计参数下,作动器控制成本随着楼层的提高而提高,因此,最大作动器控制力在顶层,取时,顶层控制力的幅值达到8000 kN左右,为本层楼面重量(或等效重力荷载代表值)的27.8%。
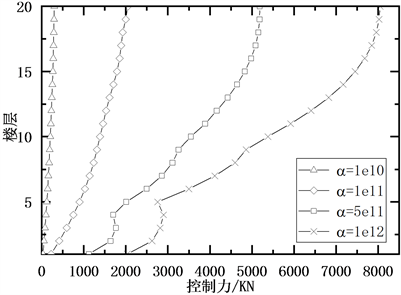
Figure 5.
vs structural seismic dynamic response
图5. 调节系数
值与楼层控制力幅值
4. 结论
1) LMI控制有显著减振效果,调节系数
越大,控制效果越好,控制成本越高,调节系数
越小,控制效果越差,控制成本越低。
2) LMI控制,顶层控制力最大,当
时减振效果较好时,顶层控制力幅值为楼面重力荷载27.8%。
参考文献