1. 引言
混凝土性能的好坏直接影响工程安全性,搅拌的均匀性可以反映混凝土的性能。因此就要求混凝土骨料在搅拌设备内的运动轨迹尽可能复杂,且尽量没有运动死区,达到搅拌均匀的效果。目前市场上使用较多的混凝土搅拌设备大致有2种,分别是立轴式和卧轴式。这两种搅拌机因其结构简单,造价不高等优点从而快速占据了市场,但由于其结构本身的特点,在搅拌过程中,搅拌缸内存在较大的搅拌低效区,导致了混凝土的搅拌均匀度不高,进而降低了混凝土的质量,越来越难以满足现代工程的需要。对于卧轴式和立轴式搅拌机,长安大学冯忠绪教授团队对其做了大量的研究,提出了利用振动搅拌技术来解决传统搅拌设备存在的搅拌低效区问题 [1] [2] [3] [4] [5]。
目前国内对于行星式混凝土搅拌机搅拌低效区的研究较少。行星式混凝土搅拌机通过其复杂行星齿轮机构的运动,使得混凝土颗粒在搅拌缸内具有复杂的运动轨迹,从而能在较短时间内使得混凝土搅拌均匀,其平均工作时间比普通卧轴式搅拌机少30~55 s,大幅提高了生产效率和经济效益。本文通过三维建模软件Pro/E对行星式混凝土搅拌机进行建模,然后导入离散元仿真软件EDEM中模拟颗粒搅拌过程,研究物料颗粒运动状况,找到搅拌低效区,进行结构优化,利用EDEM软件的后处理模块分析优化结果,为产品的研制或改进设计提供参考。
2. 行星式搅拌机结构分析
行星式搅拌机主要由搅拌缸、搅拌装置、驱动装置、行星齿轮系、刮板、卸料装置、密封装置、供水系统和机架等部分构成,其中搅拌装置由搅拌臂构成 [6]。本文为了减少仿真过程中计算机的运算量,将一些对仿真结果没有实质影响的部件简化,简化后的结构如图1所示,其驱动部件为电机,位于搅拌机的顶部。行星搅拌装置由2套搅拌臂,2个边刮臂构成。每个搅拌臂均安装1片搅拌铲板。在搅拌过程中,混凝土颗粒受到沿垂直于搅拌铲板方向的推力,铲板为斜面,使得物料颗粒在搅拌缸内作圆周运动的同时还会向搅拌缸顶部运动。由于铲板位于搅拌缸的底部,位于搅拌缸侧臂的物料无法受到铲板的搅拌作用。因此,中心架上装有边刮臂,边刮臂随着中心架作圆周运动,刮除吸附在搅拌缸侧臂的物料颗粒。
搅拌装置安装在行星齿轮系的两个行星轮上,太阳轮固定安装在机架上,驱动电机驱动中心架转动,安装在中心架上的行星轮一方面随着中心架作圆周运动,另一方面,由于行星轮与太阳轮啮合,因此行星轮同时也在沿着自身的轴线作圆周运动。安装在行星轮上的搅拌装置也因此具有较为复杂的运动轨迹,在Pro/E的机构仿真中,选取底部铲板上的部分点观察其运动轨迹(图2)。图中可以看出,该点在短时间的运动轨迹基本可以完全覆盖搅拌缸的底部,理论上提高了搅拌的效率和搅拌均匀度。
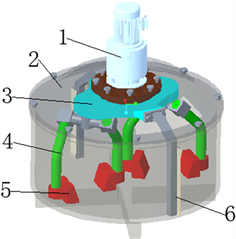 1.驱动电机 2.机架 3.行星齿轮系 4.搅拌臂 5.铲板 6.边刮臂
1.驱动电机 2.机架 3.行星齿轮系 4.搅拌臂 5.铲板 6.边刮臂
Figure 1. 3D model of planetary mixer
图1. 三维模型
3. EDEM仿真分析
3.1. EDEM简介及模型的建立
离散元方法是一种研究非连续介质的数值方法模型。主要是通过考虑颗粒的力学和惯性属性,其中包括颗粒间的相互作用和颗粒与机械设备间的作用,同时还考虑了颗粒间的质量、动量和能量交换。EDEM软件就是将这种数值方法模型应用于工程中,在一个时间步内,计算粒子的加速度和速度,进行位置的更新,通过时间步的循环迭代,完成对一个体系内的每个颗粒单体进行动力学模拟。EDEM软件后处理模块可以将仿真的过程生成动画,直观的观测颗粒的运动状况,并且能将仿真结果的数据提取与导出 [7]。
本文中的三维虚拟样机结构和尺寸参数是根据某企业已经量产的设备所建立的。设置搅拌臂的个数为4个,每只搅拌臂底部装有两个铲板。行星式混凝土搅拌机虚拟样机的模型采用Pro/E创建。
3.2. 仿真参数的设置
由于EDEM中无法直接添加水成分,在物料投放完毕后,颗粒间的接触采用Hertz-Mindlin with JKR接触模型。该模型考虑了颗粒间的粘结力,可以模拟水分和颗粒间的粘附作用对于搅拌过程的影响。当两颗粒相互接触时,所损失的表面能为U:
(1)
颗粒发生相互接触后的表面的自由能γ为:
(2)
式中:γ1为颗粒1的表面能;γ2为颗粒2的表面能;γ12为颗粒1和2之间的界面能。颗粒间的法向弹性接触力 [8] 可由下式得出:
(3)
(4)
式中:E*为等效弹性模量;α为接触面半径;R为等效接触半径;δ为法向重叠量。其中:
(5)
(6)
式中:E1、E2、v1、v2、R1、R2分别为颗粒1和颗粒2的弹性模量、泊松比及半径。

Table 1. Material property parameter setting
表1. 材料属性参数设置
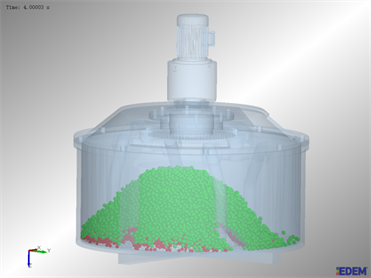
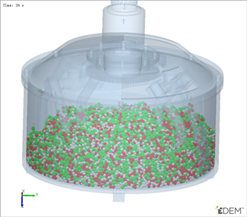
Figure 3. Mixture status at the end of feeding
图3. 投料结束混合料状态
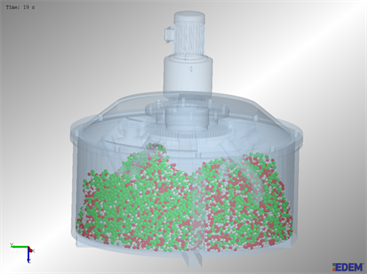
Figure 4. Mixture states after 19 s of mixing
图4. 搅拌19 s混合料状态
仿真过程中共投放3种颗粒,分别用来模拟混凝土中的水泥、沙和石。水泥颗粒的半径设为13 mm,共计投放10,000颗。沙子的颗粒半径设为15 mm,共计投放8000颗。石子的颗粒直径设为18 mm,共计投放8000颗。在EDEM中设置材料属性参数如表1、表2所示,表面能值取颗粒直径的两倍。需要指出的是,为了降低计算机的计算量,采用球型颗粒来模拟混凝土骨料颗粒,并对颗粒粒径进行了放大,因此EDEM中的材料特性参数是通过实验标定获得,以表示真实的材料特性。依次按照石、沙、水泥的顺序投料。如图3所示。投料时间为4 s,4 s后搅拌机开始运动,设置搅拌仿真时间为36 s。如图4所示,当搅拌19 s时,相较于图3,混合料已基本接近均匀分布状态,说明其均匀度受时间影响较大。
3.3. 颗粒混合均匀度分析
对于简根据仿真初始时投放的颗粒个数可知每种颗粒占总颗粒的个数之比。该比例可作为评定搅拌均匀性的理想值。在仿真结束后,在EDEM后处理模块对仿真的区域进行空间网格划分,然后将每个网格内三种颗粒的个数进行数据导出。在Excel表格中,进行数据处理,可以得到每个网格内三种颗粒的个数占网格内总颗粒个数之比,将此数值与搅拌均匀的理想值之比用来表示搅拌均匀的偏离程度 。用离散系数Cv表示搅拌的均匀程度,Cv数值越小表示搅拌的越均匀。
(7)
式中:
。
划分后的网格如图5所示,共计500个网格。网格大小的划分要适当,在保证每个网格都具有局部代表性的前提下,网格尺寸划分的越小越能表征颗粒的整体均匀度。
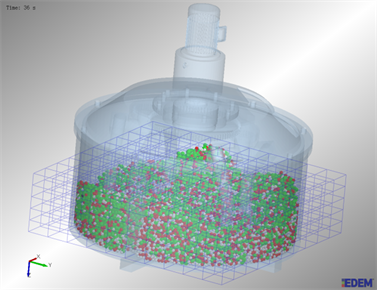
Figure 5. Mesh generation of simulation analysis
图5. 仿真分析网格划分
3.4. 搅拌过程分析
搅拌完成后,通过后处理可得到三种颗粒在不同搅拌时间的均匀度如表3所示,将表3中数据整理。
Table 3. Variation of particle mixing uniformity with time before structure optimization
表3. 结构优化前颗粒混合均匀度随时间变化关系
可得均匀度随时间变化关系,如图6所示。由表3和图6可知,三种颗粒在搅拌前期的混合均匀度提升较快,搅拌至12 s时,颗粒的离散系数分别由0.92、1.36、0.92降低至0.21、0.46、0.40,这一阶段颗粒在搅拌装置的作用下迅速达到宏观均匀。12~20 s时间段内,颗粒混合均匀度的提升速度降低,颗粒混合由宏观均匀向微观均匀状态过渡。搅拌至20 s时,此后颗粒混合均匀度基本达到稳定。图7为仿真结束时搅拌缸内的物料颗粒分布状态,显示在搅拌缸的侧臂位置有较多相同颜色的颗粒团聚在一起,混合效果不佳,形成搅拌低效区。在搅拌效果不佳的搅拌缸内壁区域选取编号为18058的颗粒,观察其运动轨迹,如图8所示。发现搅拌进行19 s时,该颗粒运动至搅拌缸内壁,此后便贴着搅拌缸内壁运动。由于边刮臂的形状为平面,且边刮臂的圆周运动方向与位于搅拌缸内壁的颗粒运动方向相同,导致这部分颗粒一直做圆周运动,不同颗粒间相对流动较差。同时,由于边刮臂与搅拌缸内壁存在一定距离,也会导致部分颗粒无法充分搅拌。
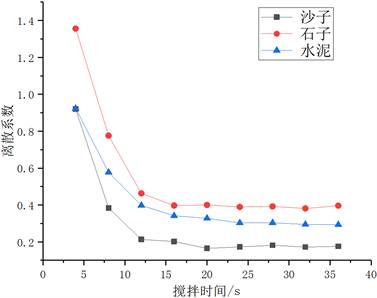
Figure 6. Change of particle mixing uniformity during stirring
图6. 搅拌过程颗粒混合均匀度变化
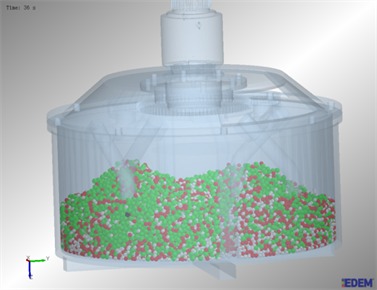
Figure 7. Mixing state at the end of mixing
图7. 搅拌结束混合料状态
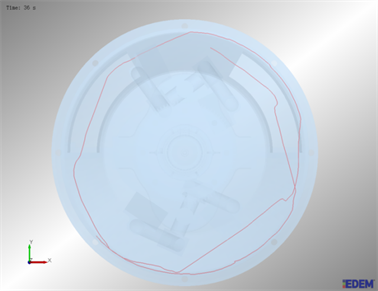
Figure 8. Trajectory of labeled particles
图8. 标记颗粒运动轨迹
4. 结构优化
4.1. 边刮臂的结构优化
通过分析,对边刮臂作以下两点结构上的改进。一是减小边刮臂与搅拌缸内壁的距离,使得所有颗粒均能受到搅拌作用。二是将边刮臂的形状由平面改为曲面,使得搅拌缸内壁处的混凝土颗粒同时具有圆周方向和竖直方向的运动轨迹。边刮臂的形状由平面改为曲面后,在搅拌过程中,搅拌缸内壁的颗粒受到边刮臂下圆弧曲面的作用,会向搅拌缸中心处流动,受到边刮臂上圆弧曲面的作用,会向搅拌缸顶部流动。图9和图10所示分别为结构优化前和优化后的边刮臂。
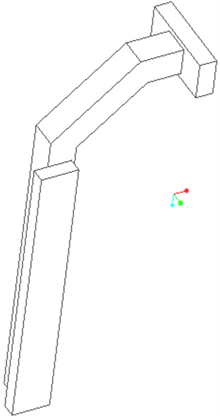
Figure 9. Edge scraper arm before structure optimization
图9. 边刮臂结构优化前
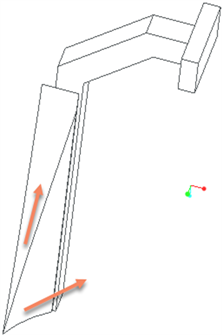
Figure 10. Edge scraper arm after structure optimization
图10. 边刮臂结构优化后
4.2. 搅拌结果对比
在其他参数相同的情况下,仅改变边刮臂的结构,重复仿真过程。观察搅拌缸内壁的颗粒分布状态,对比边刮臂结构改进前,发现结构改进后,搅拌缸内壁处的颗粒分布明显更加均匀,如图7与图11(a)所示。同样选取搅拌结束后位于搅拌缸内壁的颗粒,观察其运动轨迹。如图11(b)和图11(c)所示,颗粒的运动轨迹复杂,水平方向与铲板的运动轨迹类似,在搅拌臂的公转作用下做大范围圆周运动,同时还在搅拌臂的自转作用下做小范围的圆周运动,颗粒运动到搅拌缸内壁处时,在改进后的边刮臂的作用下,很快向搅拌缸中心运动,如图11(b)所示。竖直方向上,颗粒呈现出上下的相对运动,如图11(c)所示。
对比分析结构改进前后的颗粒混合均匀度,由图12可以看出,当搅拌20 s左右时,改进前后的三种颗粒基本达到混合均匀,且改进后的三种颗粒混合均匀度都要优于改进前,但均匀度没有大幅提高。这是由于对边刮臂的结构优化,重点是针对位于搅拌缸内壁处颗粒混合不佳的问题,而搅拌的整体均匀度仍然是由搅拌缸内部的颗粒混合程度所反映,因此该结果是合理的。
 (a) 结构改进后搅拌效果
(a) 结构改进后搅拌效果 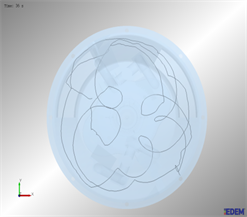 (b) 俯视图
(b) 俯视图 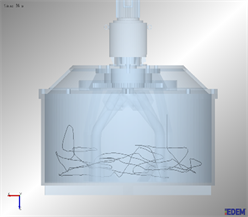 (c) 主视图
(c) 主视图
Figure 11. Trajectory of labeled particles
图11. 颗粒运动轨迹
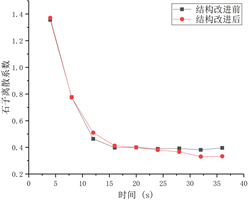 (a) 石子离散系数
(a) 石子离散系数 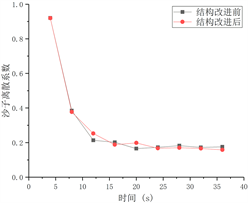 (b) 沙子离散系数
(b) 沙子离散系数 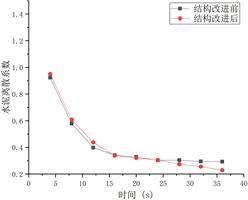 (c) 水泥离散系数
(c) 水泥离散系数
Figure 12. Comparison of mixing uniformity results
图12. 搅拌均匀度结果对比
5. 结论
通过离散元仿真分析发现,行星式混凝土搅拌机整体搅拌效果较好,但搅拌缸内壁处存在局部搅拌不均匀的现象。本文针对搅拌机边刮臂进行了结构优化,减小了边刮臂与搅拌缸内壁的距离,并将边刮臂的工作表面由平面改进为曲面。重复仿真发现,搅拌均匀度具有明显提升。仿真模拟结果可为实际产品的改进提供一定的参考,在产品的研发设计阶段发现设计中所存在的不足之处,能够有效地减少研发成本,提高经济效益。