1. 引言
随着科技和计算机技术的高速发展,农业生产系统中广泛应用了移动机器人技术 [1]。农业生产模式和新技术的应用促进了农业机械的更新和发展。农业机器越来越受到农业人口较少的发达国家的重视,也成为国际农业装备产业技术竞争的焦点之一。目前我国与西方国家还有较大的差距,但是随着我国农业机械化的发展,以及国家对于农业机械智能化的投入力度。我国的农业机器人正向着自动化和智能化发展。农业机器人技术的前景也将十分广阔 [2]。近年来,农业机器人技术得到了国内外学者的广泛关注,而移动机构作为农业机器人的最主要的结构之一,决定着农业机器人的工作环境以及工作效率,也是国内外学者的研究热点。目前,农业机器人的移动方式分为复合式移动机构以及单一式移动机构。单一式移动机构包括轮式、履带式以及足式移动机构,而复合式移动机构包含轮履复合式、轮足复合式、履足复合式和轮履足复合式移动机构。农业机器人行走机构的研究是农业机器人发展的必经之路,汇总分析我国农业机器人移动机构发展现状以此来为我国农业机器人发展提供借鉴与参考,对我国农业机器人行走机构技术加以展望。
2. 农业机器人移动机构发展现状
2.1. 单一式行走机构
单一式行走机构是小型农业机器人的常用移动机构,根据应用环境和操作方式主要分为轮式移动机构、履带式移动机构以及足式移动机构。
2.1.1. 轮式移动机构
轮式移动机构是目前机器人研究与开发的常用结构之一,主要运用于较为平坦的工作环境,具有较高的移动速度,且相对于其他移动方式,轮式移动机构控制方式较简单,因此被广泛应用于农业、家庭、娱乐等相关领域。
轮式移动机器人按照车轮数目可分为单轮滚动机器人、双轮移动机器人、四轮移动机器人、多轮移动机器人 [3]。其中最常用的机构包括由主动轮与万向轮组成的三轮式移动机构和四轮驱动的四轮式移动机构。按照机械结构将其转向方式概括为3种:铰接式转向、差速转向和车轮转向。车轮转向主要包括二轮转向、四轮转向、蟹形转向和原地旋转4种转向控制方式 [4] (如图1所示)。
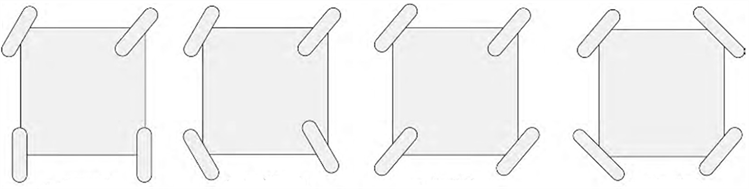 (a) 二轮转向 (b) 四轮转向 (c) 蟹型转向 (d) 原地转向
(a) 二轮转向 (b) 四轮转向 (c) 蟹型转向 (d) 原地转向
Figure 1. Common steering modes of wheeled agricultural robots [4]
图1. 轮式农业机器人常见转向方式 [4]
由于农业机器人工作环境的限制,为保持工作的平稳性,一般其轮式移动机构不选择单轮滚动式。双轮移动以及四轮移动结构被广泛应用到农业机器人的移动机构中来。双轮移动机构可分为自行车式以及两轮对称式移动 [5]。自行车移动结构通常具有窄小的车体,结构较简单,运动较灵活,如图2所示日本东京工业大学M. Yamakita与Utano研制了具有平衡质量调节器的自行车式机器人。而两轮移动机器人的灵活性较强,在机器人领域中两轮移动机器人的控制系统和理论颇受国内外高度重视。如图3所示的瑞士联邦工学院的双足机器人便是双轮对称式移动结构。

Figure 3. Biped robot from the Swiss Federal Institute of Technology [6]
图3. 瑞士联邦工学院的双足机器人 [6]
四轮的机器人较双轮式,其承载能力和机构稳定性有了很大的提高。但是四轮式的机器人在坑洼的路面上移动会很颠簸。四轮式的机器人适合在负载要求大、移速要求高,但路面较平整的情况下工作,其应用范围最为广泛 [6]。如图4所示为华南理工大学所研究的四轮电动轮式机器人和图5所示的德国Bosch公司的四轮除草机器人。

Figure 4. Four wheeled electromotive force robot [4]
图4. 四轮电动势机器人 [4]

Figure 5. A four wheeled weeding robot [7]
图5. 四轮除草机器人 [7]
目前,轮式移动机器人的研究主要是对于动力、机构和运动控制三个方面的内容。如辽宁工程技术大学研究对于农业轮式移动机器人轨迹跟踪控制的研究 [7]、山东农业大学研究的玉米收获机割台高度自动调控系统 [8]、中国农业大学设计的温室黄瓜采摘机器人系统 [9]、宁夏大学对葡萄园拖拉机自动导航系统的设计与试验 [10] 等。轮式移动机器人由于车轮布置形式以及车身结构的不同,对地形的适应能力以及动力学特性也有着很大的不同。因此,在设计轮式移动机器人时,要综合考虑考虑工作环境、控制精度、灵活性、运动学和动力学特性。
2.1.2. 履带式移动机构
常用的履带式移动机构有单节双履式、双节四履式以及三节六履式移动机构(如图6所示)。不同的履带节数,其运动机构的控制与功能都大不相同 [11]。
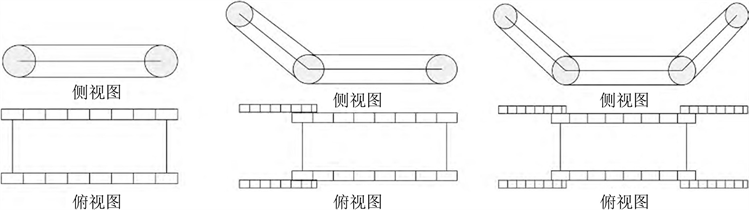 (a) 单节双履式 (b) 双节四履式 (c) 三节六履式
(a) 单节双履式 (b) 双节四履式 (c) 三节六履式
Figure 6. Common mechanisms of tracked agricultural robots [4]
图6. 履带式农业机器人常见机构 [4]
履带式移动机构转向很不灵活,在运动过程中受空间的限制,目前在进行果蔬采摘任务使用的是这种结构的机器人,它结构简单并且易于操作。如图7所示为桂林理工大学冯国亮等 [12] 设计的桃子采摘机器人模型图。
履带式行走机构适合于松软或泥泞场地工作,这是由于其接地面积大,对地面压强小、下陷幅度低,因此对路况具有较强的适应性。与轮式机构相比,履带式结构具有接触面积大、依附地面能力强的特点,可以减少对土壤的破坏,并且对地面适应性较强,可以在地形比较复杂的环境上进行农耕作业。单履带式机器人运动机构相对简单,驱动控制也较为简便。相比于轮式机构,单节履带式机构越野能力有显著

Figure 7. A model of a peach picking robot [12]
图7. 桃子采摘机器人模型图 [12]
提高。双节履带式移动机构其驱动控制方面相对复杂,要控制两个履带的运行以及在两个履带的连接处增加控制模块。在控制方面比较复杂,但该结构由于对环境的良好适应性具有良好的发展前景。
履带式农业机器人的缺点也十分明显,主要包括:移动速度慢、消耗能量大、行驶机构容易磨损、对履带的材质和构型要求高、其本身的质量大导致与地面摩擦阻力过大,容易对平整的农田造成不必要的损坏,甚至会对农作物造成伤害。履带型机器人最常出现在耕作范围广,地面泥土较为松软的地方,如扬州大学徐勇等 [13] 研究了国内外施药设施,以温室篱架型黄瓜为例,对其种植特点与生长特性进行了实地调研后,设计开发了一种履带式智能施药车,满足篱架型蔬菜施药作业的高效化、无人化和智能化的需求,同时为设施农业中智能化施药作业提供了技术和装备支撑。
2.1.3. 足式移动结构
与轮式和履带式移动机构相比,足式移动的机器人在针对崎岖复杂路况行走及承受较大负载作业等方面具有明显的优势。它们主要以陆生足式动物作为参考对象,并模仿其结构和运动特点,且具有十分明显的非连续支撑特点。虽然在运动控制方面较为复杂,但对各种极端地形有着很好的适应性,这也使足式移动机器人成为众多研究学者热衷的研究领域 [14]。常见的足式机器人可分为双足、四足以及六足机器人,目前研究最多的就是仿人型的双足机器人以及仿爬行类四组机器人结构。
双足行走机器人典型特点是机器人的下肢以刚性构件通过转动副联接,模仿人类的腿及髋关节、膝关节和踝关节。并以执行装置代替肌肉,实现对身体的支撑及连续地协调运动,各关节之间可以有一定角度的相对转动 [15]。目前仿人双足机器人的研究在世界上普遍受到关注,其中法国Aldebaran是一家致力于商用机器人研制和生产的公司,在双足机器人方面有着重要的影响。具有代表意义的NAO更是作为机器人国际杯Robo Cup Soccer的规范(如图8所示),已经有相当多的大学及研究机构选用NAO作为研究对象 [16]。日本在该领域的研究一直处于领先地位。本田公司于1993年开始推出P系列双足机器人。最近所研制的ASIMO系列机器人更被认为是仿人双足机器人系列的代表之作(如图9所示)。该系列机器人是迄今为止世界上最先进的双足机器人之一 [17]。
四足机器人具有像四足动物那样灵活运动的潜在能力,既有比双足机器人更好的稳定性,又有比六足机器人更简单的机构,是一种实用、有广阔应用前景的移动机器人。目前四足机器人的运动性能与真正的四足动物相比仍有较大差距,但也取得了很多可喜的成果 [18]。国内对四足农业机器人的相关研究具有代表性的为昆明理工大学戈振扬团队研制的四足除草机器人。如图10所示为四足除草机器人的模型 [19]。
由于足式农业机器人的较小的负重能力、能量消耗高,工作效率低等缺点,研究者对纯腿式的农业机器人研究比较少,而更倾向于研究轮腿、履腿等复合式机器人。

Figure 9. Honda ASIMO series robot [17]
图9. 本田ASIMO系列机器人 [17]

Figure 10. Kunming University of Science and Technology [19]
图10. 昆明理工大学四足除草机器人 [19]
2.2. 单一式移动机构性能分析及优缺点对比
在单一式移动机构中,根据前述内容将农业机器人各种单一式移动机构的主要特性做成表格进行比较,如表1所示。从表1中可以看出,在能源利用率方面,轮式消耗能源最少,足式最多,履带式居中;工作表效率方面,轮式工作效率最高,足式最低,履带式居中;跨越障碍方面,轮式越障能力最弱,足式最强,履带式居中;控制复杂度方面,履带式最容易,足式最难,轮式其次。

Table 1. Comprehensive comparison of single mobile mechanism
表1. 各单一式移动机构综合对比
单一式移动结构中的各个结构都具有一定的优势及缺点,如表2所示为轮式、履带式以及足式结构各优缺点汇总分析,进行对比,以此来发现各结构之间的优劣关系,使得其移动结构能够正确运用到农业机器人设计上。不同的农业机器人所适用的场合有所不同,如轮式移动机构适合在平坦的路面进行工作,能够发挥出最大的效率;而履带式机器人常用于松软或泥泞的田间来进行工作,其宽大的履带使得移动机构不容易陷入泥土中;足式机器人对工作环境的要求相对较小,能够适用于各种复杂的工作环境,但其效率并不如轮式移动机构和履带式移动机构。
Table 2. Comparison of advantages and disadvantages of single type mobile mechanism
表2. 单一式移动机构优缺点对比
2.3. 复合式移动机构
复合式移动机器人相较于单一移动方式的机器人,其综合性能更好,它是在同一机器人上综合各类不同的移动机构,使其具备多种移动方式,兼具多种移动机器人的优点。复合式移动机器人主要可分为:履腿复合、轮履复合、轮腿复合和轮腿履复合四类 [20]。轮腿履复合式移动机器人具有三种运动模式,兼具三类移动机器人的优点但结构较复杂且控制难度较大,目前相关研究进展较少。
履腿复合移动机器人兼具足式机器人的高越障性与履带式机器人的高通过性,大多数采用的是类足结构,该种结构的特点是承载能力好、越障能力强。如图11为中科院沈阳自动化研究所研制的履腿复合式移动机器人 [21],该机器人可搭载多种传感器或者机械臂用于不同目标的实验与研究。移动机器人的两条主履带分别由两个直流有刷电机驱动,通过等速控制移动机器人在水平面内进行前进或者后退,通过差动控制移动机器人实现任意半径内的转弯。
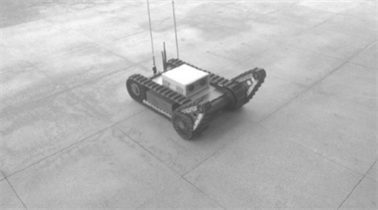
Figure 11. Walking-leg compound mobile robot [21]
图11. 履腿复合式移动机器人 [21]
轮履复合式移动机器人有轮、履两种运动模式,兼具轮式机器人的快速移动能力与履带式机器人的地面适应能力。如图12所示为华南农业大学曾山等 [22] 设计的一种水田高地隙喷雾机轮履复合动力底盘,采用履带行走装置,可提高水田行走通过性,能够减少对作物的压伤;配合轮式行走装置,在水田转向将更灵活。
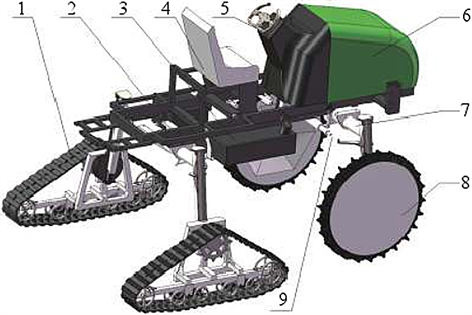 1履带行走装置;2车架及搭载平台;3油箱;4座椅;5方向盘;6发动机 7传动车桥;8轮式行走装置;9转向油缸
1履带行走装置;2车架及搭载平台;3油箱;4座椅;5方向盘;6发动机 7传动车桥;8轮式行走装置;9转向油缸
Figure 12. Wheel-track composite power chassis of high clearance sprayer in paddy field [22]
图12. 水田高地隙喷雾机轮履复合动力底盘 [22]
轮腿复合式移动机器人有轮、腿两种运动模式,同时具备了轮式机器人的快速移动性和腿式机器人的高越障性。目前,轮腿式移动机器人在结构设计上分为:轮腿串联式;轮腿分离式;轮腿变形式。对于轮腿式机器人的研究,我国实行高校与企业联合设计的方案,极大的推动了轮腿式机器人大发展速度,扩展了轮腿式机器人的应用领域。如图13所示为北京理工大学启动“北理哪吒”项目,以六自由度并联机构为基础,经过长期的设计与改进,最终设计制造出轮腿复合式机器人北理哪吒 [23]。

Figure 13. Wheel-legged compound robot [23]
图13. 轮腿复合式机器人 [23]
3. 农业机器人移动机构关键技术及应用实例
3.1. 驱动系统
目前农业机器人驱动方式主要有电动驱动,液压驱动、气压驱动等方式。一般体型较小的机器人采用电机驱动,体型较大的农业机器人采用电控液压驱动或电控气压驱动。
液压驱动技术是一种比较成熟的驱动技术。它具有动力大、快速响应高、易于实现直接驱动等优点。适于在承载能力大,惯量大等机器人中被应用。但液压系统需进行能量转换(电能转换成液压能),速度控制一般采用节流调速,效率低于电动驱动技术。气动驱动技术适于在中、小负荷的机器人中采用,具有速度快、系统结构简单,维修方便、价格低等优点。但因实现伺服控制较为困难,多用于程序控制的机械中。电动驱动技术由于低惯量,大转矩交、直流伺服电机及其配套的伺服驱动器的广泛采用,这类驱动系统在机器人中被大量选用。这类系统不需能量转换,使用方便,控制灵活。因此在农业机器人中被广泛的选用。
3.2. 转向系统
在农业机器人转向系统中,轮式转向机构使用最广,其转向方式的选择分为以下几种:前轮转向、前后轮同时反向偏转、后轮转向、前后轮同时同向偏转、多桥转向、铰链转向、半挂车转向 [24]。履带移动机构转向原理不同于轮式,它需要专门的转向机构改变两侧履带卷绕速度大小或方向使车辆转向。履带车辆应用的转向机构依据功率流向可分为单功率流和双功率流传动。
4. 存在的问题及解决方案
根据研究现状可以发现,农业机器人移动机构的发展趋近成熟,目前研究的主要方向为轮式以及履带式移动机构,对于足式和复合式移动机构研究较少。主要原因在于轮式和履带式移动机构控制系统较为简单,而足式和复合式移动机构由于其过高的自由度导致其控制算法相对较难,找到一种合适的控制算法是当下足式和复合式移动机构的发展方向。其次,制约农业机器人移动机构的主要因素包括制造成本高,能量利用率低;二是智能化程度低,不足以在各种复杂环境下工作。
对目前农业机器人移动机构中存在的问题首先要做的就是改进其机械结构,使其制造成本降低并且降低移动机构自由度,提高资源利用率。采用多传感器融合技术来应对复杂环境下的信息收集,增强农业机器人的智能化程度。因此,在改进机械结构的同时,还需要对传感器、软件和控制算法进行改进。
5. 未来展望与总结
文章综述了农业机器人的常见移动机构,得出目前农业机器人中的轮式以及履带式移动机构,能够完成普通工作环境下的大部分工作,且控制较为简单,是目前常用的农业机器人移动机构,相对于足式以及复合式移动机构,对于复杂环境的适应能力以及工作效率相对较低。但足式和复合式移动机构能量利用率低下,控制相对困难,只能适用于特殊场合,因此在农业机器人移动机构中的相关研究较少,需要加大力度对其进行开发与研究,同时也要大力推广轮式和履带式移动机构的大规模应用和优化,早日实现农业移动机器人的规模化和市场化。
基金项目
高层次人才启动项目(XJGC20190927);贵州省科技计划项目(黔科合基础[2019] 1152号);国家级大学生创新创业项目(项目编号:202014440023)。