1. 引言
吸尘器是家用清洁的有利工具,能够解决绝大多数的清洁工作。2000年以来,我国家用吸尘器的出口量年平均在2800万台以上,出口量世界排行第一 [1]。
随着计算机和电子技术的发展,智能家居成为了人们关注的重点,市面上出现了大量的吸尘机器人,智能吸尘机器人成为智能化家居用品的主要类型之一 [2]。更智能更便捷是吸尘器未来的发展方向,如今的吸尘器已经有各式各样的形态,而且国内的吸尘器行业也处于蓬勃发展期 [3]。目前,吸尘器的种类从传统的卧式吸尘器和立式吸尘器逐渐向智能的无线的吸尘机器人发展。以此国内各方面学者也对于智能吸尘器的开发与应用进行了相关研究。对于智能吸尘器的研究主要为对其关键技术路径规划技术、传感器技术的研究。对于吸尘器的发展开展智能化研究是智能化发展的必经之路,符合时代发展。通过分析近年来智能吸尘器和核心技术的研究现状以此来为吸尘器智能化发展提供参考,对我国吸尘器行业的发展前景和趋势加以展望。
2. 智能吸尘器特点分析
智能吸尘器是一种将移动机器人技术与吸尘技术有机融合起来的家用服务型清洁机器人。能够实现家庭、宾馆、写字楼等室内环境的半自动或全自动清洁。自带电源,小巧轻便,操作简单,自主性强,具有很强的实用性和广阔的市场前景。
在最初的智能吸尘机器人市场中,将电子元件作为机器人设计的基础元件,将小型的机器人作为依托,同时在其中加入自动控制系统、机电一体化系统,最终形成智能吸尘器 [4]。目前对智能吸尘器的设计一方面致力于提高低成本传感器下的清洁机器人的定位精度,同时为了避免清洁机器人的盲目清扫和重复清扫,对全覆盖的路径规划技术进行研究。这是一项充满挑战且意义重大的项目,对于清洁机器人的完全普及具有重要的意义。
智能吸尘器的工作首先通过采集传感器收集的各种信号开始,一般由充电处出发,检测点电量是否充足后进行路径规划和避障处理后来完成一系列清洁工作。如图1所示是智能吸尘器的工作流程。
3. 智能吸尘器关键技术
智能吸尘器能够实现智能化清洁主要依靠传感器技术、路径规划技术的配合来实现吸尘器的全自动清洁工作。目前国内外对于智能化吸尘器的研究方向颇多,通过汇总分析其关键技术的研究以此来为我国智能化家居生活的发展提供借鉴与参考。目前对于智能吸尘器的研究主要放在传感器、路径规划技术等领域。
3.1. 传感器技术
传感器技术是各类智能化设施的重要组成部分,是机器人的感觉器官,负责采集外界环境和自身状态的信息。传感器作为模仿人类感知功能的核心基础元件,一般可以分为视觉传感器、听觉传感器、力觉传感器、触觉传感器、运动觉传感器、位姿传感器、嗅觉传感器、味觉传感器、距离传感器等多种传感器 [5]。
将传感器运用到吸尘器设备中是吸尘器智能化发展的必要条件,现目前智能化吸尘器所涉及到的传感器多为触觉传感器、视觉传感器、距离传感器等。通过各类型传感器相互结合工作来为智能化吸尘器反馈其工作环境。
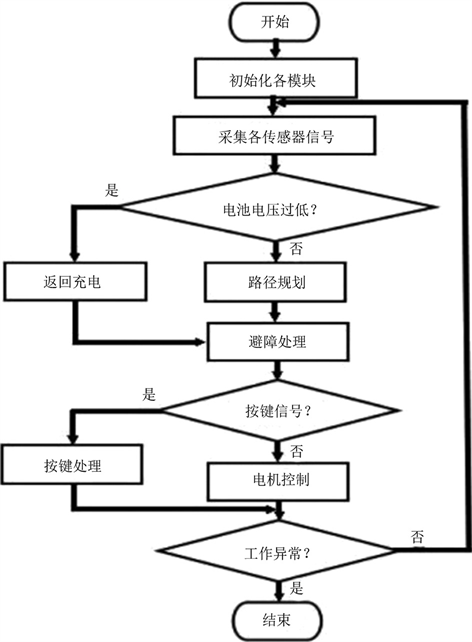
Figure 1. Workflow of intelligent vacuum cleaner
图1. 智能吸尘器工作流程
3.1.1. 多传感器融合技术
随着移动机器人拥有越来越高度感知能力和强大的信息处理能力,使它具有越来越多的功能并且可以完成不同的任务。移动机器人的感知能力类似于人体的感官系统,为了准确地感知事物,必须多个器官相互配合,才能完整地感知整个环境信息。因此,智能吸尘器感知环境也需要多个或多种传感器才能更完整地感知环境 [6]。多传感器信息融合的具体过程(如图2所示)主要包括五个步骤:数据采集,数模转换,数据校验,信息分类和融合处理。
多传感器融合在结构上按其在融合系统中信息处理的抽象程度,主要划分为三个层次:数据层融合、特征层融合和决策层融合。数据层融合是最低级别的融合,具体过程为将传感器测量的原始数据可以精确到单个值。特征层融合是中间级别的融合,该方法同时考虑了数据级融合和决策级融合,因此在抗干扰和细节保存方面取得了良好的效果。决策层融合是最高级别的融合,该方法对传感器性能的依赖性较小,抗干扰能力强,但会造成严重的信息丢失,无法获取详细信息,融合前需要进行大量的数据预处理。
多传感器融合技术被广泛应用到移动机器人的定位、路径规划、环境建模等工作中去,如浙江大学潘杨杰等 [7] 作围绕着复杂室内环境下的机器人定位技术展开,提出了一种多传感器融合的视觉定位方案。

Figure 2. The concrete process of multi-sensor information fusion
图2. 多传感器信息融合具体过程
该方法。利用EKF算法融合了机器人轮式里程计和IMU的位姿信息辅助视觉里程计作为SLAM算法的前端部分以此来弥补了传统视觉SLAM算法过于依赖图像信息的不足的问题。
3.1.2. 传感器技术研究现状及分析
针对于智能吸尘器中传感器的设计研究,我国学者近年来提出了新的构思与设计。如浙江大学沈明琪等 [8] 开展了基于多超声波传感器的移动机器人目标定位新方法研究。中国科学院大学徐颖蕾等 [9] 提出了一种基于贝叶斯估计的栅格地图融合方案,并进行全局路径规划,使用动态窗口法完成局部避障。沈阳理工大学杨小菊等 [10] 开展基于多传感器信息融合技术的移动机器人避障算法的研究。
在目前现有的传感器技术的研究中,绝大多数为对于多传感器融合技术的研究。其中不难看出,单一类型的传感器由于其信息收集与反馈的局限性,对环境信息的把控不精确,现如今很难支持智能化移动机器人的工作需要。而多传感器融合技术通过搜集各种类型传感器所搜集到的信息反馈来对周围环境进行建模得到的数据就尤为精确,因此,在智能吸尘器未来的研究中,多传感器融合技术已成为主流的研究方向。
3.2. 路径规划技术
路径规划的研究始于七十年代,八十年代启发式和近似方法被应用于路径规划中。九十年代开始,各种智能算法被广泛应用于路径规划中 [11]。移动机器人路径规划问题可以描述为移动机器人在有障碍的环境中,寻找一定指标下(如距离、时间、能量等)尽可能优化的路径。其主要解决的问题包括:使移动机器人从起始点到达目标点;避开障碍物且经过必须经过的点。
在智能吸尘器工作时,其工作的路径是十分重要的。吸尘器能按照这个路径实现自动清洁工作。在路径规划时分为动态路径和静态路径。动态路径是指在清扫过程中原定的路径会出现某些障碍物,例如人和宠物等,此时需要重新规范清洁路径。而静态路径是指清扫路径与预定的路径是相同的。一般情况下,在路径发生改变时,需要考虑预定区域是否需要重新清扫 [12]。
3.2.1. 路径规划技术分类
目前路径规划的种类很多,按照不同的分类标准可以划分不同的路径规划。根据移动目标的不同可以分为点到点的路径规划和全覆盖路径规划方法。根据不同的环境信息可以分为已知环境下的全局路径规划和未知环境下的局部路径规划 [13]。
在已知环境中,机器人依据当前的环境信息反馈采用适当的建模方法对当前的环境信息进行建模,并采用已有的成熟的路径规划算法规划出一条最优路径。该虽然规划方法比较成熟,但需准确的知道当前的环境信息,计算量比较大,且实时性差。在未知环境中以及环境信息部分了解的情况下,机器人需利用自身的传感器探索并认知环境信息后规划出路径规划。该规划方法具有机器发现、机器学习等智能行为,又称智能优化路径规划方法。
3.2.2. 路径规划技术研究现状
在智能吸尘器路径规划的研究中南京工程学院周冬冬等 [14] 采用蚁群算法对清扫机器人进行路径规划设计。通过分析蚁群算法原理,并结合家庭中清扫时清扫机器人所遇到的障碍物,通过环境建模实现清扫机器人的路径规划。武汉科技大学陈超勇 [15] 等针对公共场所的环境特点,重点研究了清洁机器人的路径规划技术,以提高其覆盖效率。王新武等 [16] 研究了基于已知环境图栅格化描述的清洗机器人全覆盖路径规划算法、对未清扫区域和障碍区域分别进行标记记录区域清扫次数,利用不同的优先准则。常州大学信息科学与工程学院马正华等 [17] 通过实验验证了提出的全覆盖遍历路径规划,并较为详细地分析了该算法的实现过程。
现有的路径规划技术常常用于智能吸尘器的避障系统,通过对于工作环境的建模来为智能吸尘器的工作及逆行路径规划、避免障碍物的碰撞,以此来实现全自动的清洁工作。
4. 智能吸尘器发展动态
早在20世纪80年代SANYO公司就正式开始进行自主吸尘机器人的研发工作,总的来看,自主吸尘机器人的研究还刚刚起步,在自主能力和工作效率上还有待提高。目前在欧美、日本等西方发达国家,已经开发出面向市场的实用智能吸尘机器人。世界上第一款量产的智能扫地机器人 [18] (如图3所示)家由电巨头莱克斯于2001年推出,并将其命名为“三叶虫”。继瑞典发明三叶虫扫地机器人之后,在2003年,美国的iRobot Proscenic公司联合研发出了Roomba系列的扫地机器人产品 [19],如图4所示。它采用iAdapt技术,主要是随时监测工作环境,采取三段式清扫模式,使地面清扫更便利,更干净。同时采用红外传感器制成虚拟的阻隔边界,防止跌落。日本日立公司于2003年5月宣布成功开发出家用清洁机器人,这是一种能够在房间中自由行走并打扫卫生的清洁机器人。

Figure 3. Trilobite intelligent floor sweeper
图3. 三叶虫智能扫地机器人
英国、法国和澳大利亚也都推出过清洁机器人产品。在国内,哈尔滨工业大学、华南理工大学、上海交通大学等单位也对清洁机器人进行了大量的研究并取得了一些成果。
国内在智能扫地机器人领域的起步较晚,但近年也取得了显著的研究进展。苏州益节科技的地贝、苏州怡凯电器旗下的科沃斯、深圳智宝科技等已经达到与Roomba水品相近的程度,其产品线包含了超声波式、非接触式、磁铁、遥控器、阻挡器、红外式等关键技术。哈尔滨工业大学也开发研究成功了智能型清洁机器人,由哈尔滨工业大学洪炳镕教授负责的黑龙江省科技攻关项目“家庭机器人及嵌入式智能控制系统”。重庆大学智能科学技术研究所与宁波波郎电器有限公司合作开发的室内清洁机器人,能够沿墙壁行走清扫地面。海尔集团公司也开发了一种智能吸尘器,它包括吸尘器外壳、支架、吸尘部分、电源,使吸尘器自主行走的行走装置、用于检测障碍的传感器以及相应的控制部分。
从国际市场来讲,我国是世界上最大的吸尘器生产基地。吸尘器出口在所有的白色家电中位列前三位,年出口量达到了万台以上。加上我国香港、台湾等地的企业,出口数量达到了万台。主要出口到欧洲、美国和日本等发达国家。但与国际市场相差较大的是,国内的吸尘器年消费总量却只有万台左右,远远少于电磁炉、微波炉等这样的家居小家电。从20世界90年代中后期开始,中国吸尘器的销量每年以38%的速度上升。如今吸尘器不但功能越来越多,外观日趋美化,其价格也越来越便宜,受到了不少市民的喜爱。中国吸尘器市场主流品牌主要有海尔、飞利浦、伊莱克斯、龙的、美的等 [20]。
5. 未来展望
智能吸尘器作为家庭服务型机器人具有巨大的市场前景和发展潜力,能够给人们带来很大的舒适和生活的便利。但目前智能吸尘器关键技术发展不成熟,极大的限制了智能吸尘器的智能化发展,其次昂贵的价格也是影响推广智能吸尘器的主要因素之一。通过对于关键技术的发展现状分析,智能吸尘器的智能化程度很大一部分上取决于其对于外界信息的获取于感知,通过对于传感器技术、路径规划系统等的研发,以此来提高吸尘器的智能化。在此基础上,智能吸尘器将来的发展趋势可以向着高度智能化、多功能集成、低成本的方向发展。
基金项目
高层次人才启动项目(XJGC20190927);贵州省科技计划项目(黔科合基础[2019] 1152号);国家级大学生创新创业项目(项目编号:202014440004)。
参考文献