1. 引言
对于极区的定义,不同国家、不同地区对极区定义不同。如美国联邦航空管理局(FAA)定义北纬78˚以北为北极地区,而波音公司进入84˚以北或南纬84˚以南定义为极区飞行,进入北纬83.5˚以南或南纬83.5度以北定义为穿出极区,MD-11客机以北纬85˚和南纬85˚作为进入和穿出极区的分界线。极区惯性导航技术作为一门惯性导航技术专门研究,是因为在传统的以指北方位作为导航坐标系的惯性导航系统中,经纬度地理坐标和方位角解算机械编排是关于纬度的余弦和正切的三角函数,解算误差会随纬度的升高呈指数倍变大,纬度接近或通过极点时将会导致惯导系统解算奇异。相对于传统惯导系统解算方案只适用于低纬度导航的局限性,研究的极区惯性导航方案可使惯导系统工作于全纬度范围,实现舰艇全球海域作战任务的需求 [1] [2]。
2. 半解析式惯导工作原理
2.1. 半解析式惯导系统平台结构及功能
惯性平台导航系统由装有陀螺仪和加速度计的台体及框架系统组成。由于载体具有三个转动的自由度,所以平台系统至少要有三个环,才能保证将台体与载体的运动相隔离,不受运载体影响,而在惯性空间始终保持要求的姿态。作为惯性导航系统的稳定平台,一般情况下至少由三个框架和三个稳定伺服回路(纵摇、横摇及方位稳定回路)所组成。因为要实现平台轴不受干扰的跟踪与地球有关的坐标系,如地理坐标系,就必须有相互垂直的三个轴。舰船三环半解析式惯性平台的一种结构形式如图1所示 [3]。
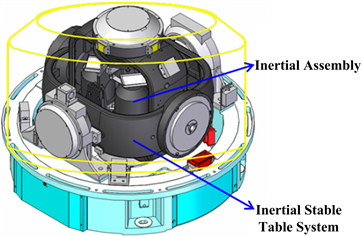
Figure 1. Schematic diagram of semi-analytical inertial navigation system
图1. 半解析式惯性系统示意图
在稳定回路和修正回路同时工作时,惯性平台能准确地模拟当地地理坐标系,给出舰船的水平角和航向角等基准信息;通过惯导计算机给出舰船的速度、位置,完成导航定位。
2.2. 平台系统伺服回路的耦合
载体的横滚、俯仰及偏航运动,三轴平台系统的框架轴实际上不是相互正交的,而且,由于台体与载体运动的隔离,框架轴与平台参考坐标系轴也是不平行的。以单自由度陀螺仪的平台系统为例,如图2所示。
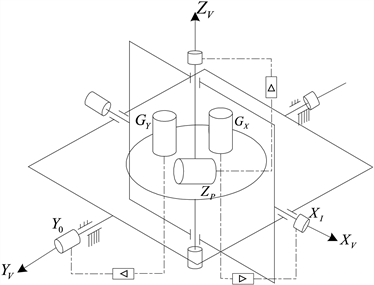
Figure 2. Schematic diagram of platform frame in neutral position
图2. 中立位置的平台框架示意图
当平台框架处于中立位置,这时若需要平台
轴以角速度
转动,须向
陀螺仪施加一定控制信号,并把其输出信号经伺服放大器输入装在
轴上的力矩电机,使平台以角速度
转动。如载体航向变化为k时,这时绕
、
轴转动的角速度分别为
、
;那么,
、
在
、
轴上的投影为
(1)
可见,载体的航向变化,使得陀螺仪输入轴和装在框架轴上的力矩电机轴不平行,因而所需平台绕陀螺仪输入轴的运动必须由绕两根框架轴的运动来保证。那么,
、
轴上的力矩电机所产生的控制角度由式(1)决定。而平台沿
、
轴的角速度如式(2)所示 [4]。
(2)
平台坐标系相对于惯性坐标系的坐标变化矩阵,由式(2)可得
(3)
3. 游移方位编排
游移方位惯性导航系统的导航坐标系为游移坐标系,仍使用n系表示。在游移方位坐标系中,在方位轴方向上只对方位陀螺施加补偿地球自转角速度垂直分量的控制力矩。惯性导航系统中的导航坐标系n系的
轴相对地球围绕
轴的角速度为零,定义
轴与真北方向的夹角为游移方位角
,且会随时间变化。如图3所示:

Figure 3. Walking azimuth inertial navigation system coordinate system
图3. 游移方位惯性导航系统的导航坐标系
由图3可知从地理坐标系t系到导航坐标系n系的方向余弦矩阵可以表示为:
(4)
导航坐标系n系与地球坐标系e系之间存在转换关系如下:
(5)
式(5)中,
为由e系到n系的方向余弦矩阵,且具体表达式为:
(6)
式(6)中包含可以确定载体位置的纬度L、经度
的信息与游移方位角
的函数,所以由该式进行解算可以得到载体纬度L、经度
和游移方位角
的主值:
(7)
(8)
此外,根据导航坐标系n系和地理坐标系t系之间的关系可知载体的水平速度分量在n系和t系上的投影之间的关系为:
(9)
其中,
、
为载体在游移方位坐标系中的水平速度 [5]。
则数学平台的旋转角速度
为:
(10)
根据式(9)、(10)可以进一步得到惯性导航系统的平台指令角速度
为:
(11)
位置矩阵
的方向余弦矩阵的微分方程为:
(12)
利用式(10)可以对位置矩阵进行即时的更新,然后通过式(11)得到载体的位置信息和游移方位角信息。
在游移方位机械编排中,惯性导航系统的导航解算方程可以写为:
(13)
利用
可以获得载体的横摇角
、纵摇角
及航向角
,但是航向角
是b系的
轴和n系的
轴之间的夹角,中间还有一个游移方位角
,所以真正的航向角为:
(17)
游移方位角的数学模型如下:
(18)
由式(18)可以看出,当载体只存在北向速度或静止时,游移方位角
保持不变;只有当载体存在东向速度时,游移方位角才会变化(赤道除外) [6]。
综上所述,可以得到游移方位惯性导航系统的机械编排框图如图4所示。
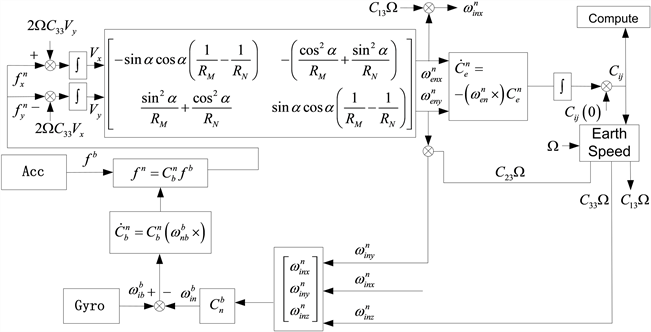
Figure 4. Mechanical layout block diagram of walking azimuth inertial navigation system
图4. 游移方位惯性导航系统机械编排框图
根据游移方位惯性导航系统的工作原理可知,游移方位惯性导航系统的机械编排由于方位轴陀螺不需要施矩,所以可以解决当地水平指北方位惯性导航系统在高纬度地区工作时遇到的部分问题中。但是在地理极点处,没有了北向基准,所以游移方位角失去意义。当纬度接近90˚时游移方位角在极点处的变化率趋于无穷大,所以游移方位机械编排惯性导航系统与当地水平指北系统一样不能在地理极点附近使用 [6] [7]。
4. 基于惯性平台调制的高纬度工作方案
旋转调制技术在捷联惯导方案中已经使用较为广泛,通过惯性平台的旋转调制实现惯性元件的自补偿。在一般的捷联惯导系统中,对水平陀螺进行旋转调制需要在平台增加转动结构和测角机构,使其满足平台调制的旋转功能。在半解析式系统中,由于已经具有了隔离载体的物理惯性平台,因此在增加垂直轴调制作用时,仅仅需要对机械编排的方案机械更改,通过对垂向陀螺增加一个附加角速度的控制来完成。
与捷联惯导系统的旋转调制不同在于,捷联惯导系统的旋转调制通常采用“正反停”调制方案,以减少由于光学陀螺标度带来的影响;但是在半解析式惯导系统中,由于采用的是机械陀螺,若采用与捷联惯导类似的调制方案,将导致机械陀螺在“转停”切换过程中,引起陀螺转速失衡,极大影响机械陀螺漂移稳定性。因此在半解析式惯导系统的水平陀螺调制技术中,采用的是绕垂直轴匀速旋转的调制方案,考虑到机械陀螺对惯性平台的施矩承受能力,采用60˚/小时的匀速调制方案,即惯性平台6小时调制一周。具有平台调制功能的半解析式惯性导航系统的机械编排方案如图5所示。
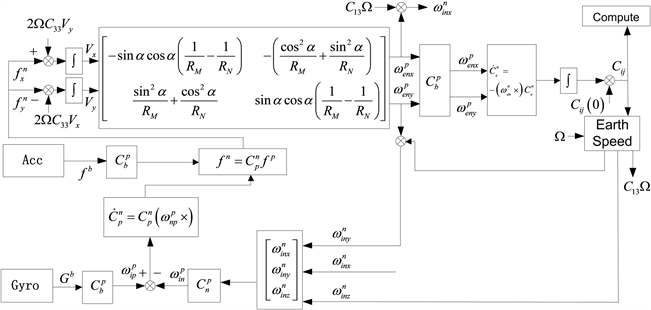
Figure 5. Semi-analytical high latitude mechanical arrangement of inertial navigation with rotation modulation of inertial platform
图5. 基于惯性平台旋转调制的半解析式惯导高纬度机械编排
当惯性平台调制后,取得的调制后的方位角变换如下:
(19)
其中,
的惯性平台调制周期。
调制后陀螺的水平分解为:
(20)
惯性平台调制后,附加的惯性平台施矩量为:
(21)
(22)
其中,
是平台坐标系相对于地球坐标系变化角速率
的斜对称矩阵。
则
有如下关系:
(23)
其中,
、
为惯性平台旋转调制的曲率半径,
为调制挠率。
在调制情况下,曲率半径和挠率由式(24)得到:
(24)
平台的控制指令如式(25):
(25)
速度计算由速度方程得到式(26):
(26)
基于惯性平台调制的半解析式惯导系统,在不改动硬件基础的条件下,通过对垂向陀螺施加附加力矩,以系统调制技术提高传统半解析式惯导系统在高纬度的导航精度。
5. 格网导航
无论是传统的半解析式惯导系统还是具有平台调制功能的半解析式惯导系统,在格网平面内的“显示输出”是统一的。
设P点地理纬度、经度和高度分别为L、
和h,格网坐标系和地理坐标系间的方向余弦矩阵
为:
(27)
式中:
:格网角。
载体系与格网系之间的方向余弦阵为
(28)
式中:
:地理航向;
:纵摇角;
:横摇角;
格网航向
:
(29)
在极区,
不易求,因此真北航向同样难以得到。但格网航向
容易得到,它是以格网北向作为航向参考基准的,避免了相对经线汇聚带来的定向困难,所以格网航向在极区内可以用作导航 [8]。
6. 极区导航输出
以游移方位力学编排作为执行全球导航解算的内核,惯导工作时平台(或数学平台)内的方位轴仅跟踪地球旋转,不再始终指向地理正北,解决了计算方位指令加速度时带来的计算溢出问题;将游移坐标系内的速度和方位投影到地理系内,得到常规地理真北航向和地理东北天速度;同时又将游移系内的速度和方位投影到横向坐标系内,得到横向地理坐标系下的航向、东北天速度和位置。设计进入和穿出极区的判别逻辑,根据纬度确定状态切换的判定值,在高纬度地区惯导实现地理系导航参数和横坐标系导航参数的平稳切换。
极区导航的机械编排如图6所示。在游移方位坐标系内,完成姿态余弦矩阵
、位置余弦矩阵
和游移系速度
的更新计算;由于游移坐标系内解算方位仅跟踪地球旋转,规避了地理坐标系内解算的溢出问题,因此能够进行全球解算更新。完成游移坐标系内的导航解算更新后,进行坐标变换,得到地理系和横向坐标系的姿态、速度和位置,最后根据纬度进行判断,在极区时,输出横向地理坐标系的导航参数,否则输出常规地理坐标系的导航参数 [9] [10]。
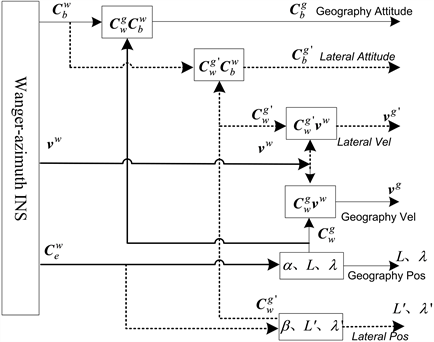
Figure 6. Polar navigation mechanical layout
图6. 极区导航机械编排
为比较基于平台调制的半解析式惯导系统与传统半解析式惯导系统在高纬度工作的导航性能,设定仿真条件如下:初始位置
,以
匀速向北极航行,其中陀螺常值漂移
,
,加速度计零偏
,则在两套系统在纬度变换的过程中,航向误差仿真结果如表1所示。
从仿真对比可以看出,基于惯性平台调制技术半解析式惯导系统利用系统技调制术,在一定能程度补偿了陀螺及加速度计的常值误差,这种补偿效果同样适用于高纬度的情况,较大程度地提高半解析式惯导系统高纬度航向精度,提升了半解析式惯导系统的高纬度工作性能。
7. 结论
本文以基于垂直轴调制的半解析式惯导系统为研究对象,分析了高纬度惯导系统的工作特点以及高纬度极区导航算法,开展了基于平台调制的半解析式惯导系统技术研究,提出了具有平台调制功能的半解析惯导系统在高纬度导航方法,对比传统的半解析式惯导系统在高纬度工作模式,通过仿真分析了基于惯性平台调制下半解析式惯导系统与传统半解析式惯导系统在高纬度的航向精度,验证了其在高纬度工作性能的优势。