1. 引言
对于钢筋混凝土工程,结构安全健康监测是工程安全的重要保证,对结构的安全、维护和耐久性都有重要意义 [1] 。用于识别混凝土内部或表面是否存在空洞、裂缝等缺陷的传统手段包括超声波、X射线、红外线传感器等,这些技术本质上是点式传感器,很难一次性测量出大范围信息,测量效率较低 [2] [3] [4] 。
近年来,分布式光纤应变传感技术广泛应用于工程结构健康监测,具有传感距离大、稳定性好和耐久性强等优势。基于布里渊光时域分析技术(BOTDA, Brillouin Optical Time Domain Analysis)的光纤传感器能够以厘米级的空间分辨率进行几公里以上的分布式应变测量,可用于桥梁表面裂缝检测 [5] [6] 。
受此启发,本文提出用高分辨率分布式光纤应变传感技术预测混凝土内部缺陷,采用深度学习方法进行缺陷样本训练和识别,以人工神经网络自动提取缺陷样本特征,通过多层网络堆叠提高网络的表达能力,采用Dropout技术避免过拟合。通过缺陷模拟实验对缺陷预测方法进行验证。
2. 原理
2.1. 分布式光纤应变监测技术简介
布里渊散射是光在光纤内传输引起的一种散射现象,布里渊散射光的中心频率变化与散射位置光纤的应变和温度成线性关系,因此可以用来进行应变或温度测量。基于受激布里渊散射机理的测量系统称为BOTDA。本文研究采用公司自研的一款分布式光纤应变解调仪,应变按测量精度为5 με,空间分辨率为10 cm,数据采样间隔为5 cm。
2.2. 缺陷监测算法原理
1) 算法基本原理
基于分布式光纤应变信号的缺陷检测技术主要目的是判断对于一定范围的建筑结构体是否存在缺陷。考虑到建筑体对光缆的应力作用,当存在缺陷时,在光缆固定方式、建筑体类型、缺陷深度和大小等诸多因素会导致作用在光缆上的空间局部信号存在差异,反应在应变信号上也很难用建模的方式去探寻规律。
本文的缺陷方法是基于深度学习的原理实现,通过采集大量的缺陷信号和无缺陷信号,让计算机通过训练自主去寻找缺陷信号本身存在的特征,这样当样本信号足够多时,就能够训练出足够好的模型去预测是否存在缺陷。
采用Tensorflow 2.0深度学习框架进行模型的训练和识别。TensorFlow是Google于2015年发布的深度学习框架。目前来看,TensorFlow和PyTorch框架是业界使用最为广泛的两个深度学习框架,TensorFlow 在工业界拥有完备的解决方案和用户基础,又能无缝部署网络模型至工业系统。本文以TensorFlow 2.0版本作为主要框架,实现深度学习算法。
深度学习的算法包括数据预处理、神经网络结构、分类器、模型训练与验证几个部分,分述如下。
2) 数据预处理
分布式光纤应变传感得到的是与建筑结构物位置相关的应力分布序列信号,缺陷信号反应在局部信号与其他范围信号存在一定差异,因此要对应变序列信号进行加窗,对有限空间范围的数据进行分析。实际数据处理时采用固定长度的滑动窗口对数据进行截取,作为输入样本数据。滑动窗口有两个作用,一是提高样本的多样性,即通过窗口的滑动在不同位置截取局部样本,提高了样本数量;二是更好的提取信号本身的特征,窗口的滑动可以有效提取出那些平移不变的信号特征,从而进一步有利于信号的分类识别,避免手动操作截取样本的偏差。
对于直接截取的样本数据,进一步采用分类识别中常用的maxmin归一化方法,把截取的数据归一化到[0,1]的范围,有利于模型训练的加速收敛。
3) 神经网络结构
采用三层全连接神经网络用于模型训练和识别,在tensorflow中的网络结构如图1所示:

Figure 1. Neural network structure in Tensorflow
图1. Tensorflow中的神经网络结构
训练网络共有54,338个参数,其中dense、dense_1和dense_2为三层全连接网络。为了解决神经网络的过拟合问题,在网络结构中加入了Dropout层,即dropout、dropout_1和dropout_2。2012年,Hinton 等人最早提出了使用Dropout方法来提高模型性能 [7] 。Dropout通过随机断开神经网络的连接,减少每次训练时实际参与计算的模型的参数量;但是在测试时,Dropout会恢复所有的连接,保证模型测试时获得最好的性能。
每一层网络的激活函数采用ReLU函数。ReLU函数非常简单,在y = x的基础上面截去了x < 0的部分,可以直观地理解为ReLU函数仅保留正的输入部份,清零负的输入,具有单边抑制特性。虽然简单,ReLU函数却有优良的非线性特性,而且梯度计算简单,训练稳定,是深度学习模型使用最广泛的激活函数之一。
4) Softmax分类器
神经网络的主要功能是从大量样本信息中提取关键特征,分类识别还需要增加分类器。本文在神经网络结构后面增加一个Softmax分类器。Softmax是一个基于概率的多类分类器,基本原理如下。
数据集
中共包含M个样本,分为K个类别,对于给定的输入样本zm,Softmax分类器会基于下面的表达式判断属于每一类别的概率,输出一个分类标签ym。
(1)
其中,om是输入zm的输出类别;
是模型的参数,需要通过训练数据来优化。表达式是按照分布进行归一化,使得所有类别的概率和为1。
5) 模型训练与验证
模型训练与验证采用Tensorflow中的keras库函数。keras提供了一系列高层的神经网络相关类和函数,如经典数据集加载函数、网络层类、模型容器、损失函数类、优化器类、经典模型类等。采用keras库函数可以快速实现模型训练与验证。
3. 实验
3.1. 缺陷模拟
缺陷模拟的方式是通过在光纤局部增加应变信号来实现,通过控制应变大小和应力作用范围得到不同的缺陷模拟信号,作为缺陷检测的正样本。对于没有施加应变的光纤,通过随机采样获得无缺陷负样本。通过深度学习自动提炼缺陷样本特征,从而以二分类方式对缺陷进行预测。
对光纤进行缺陷模拟的实验图2所示,采用单模裸光纤作为传感单元,应变变化通过调节光纤位移实现,采用的调节装置是精密位移手动调节平台,最大行程200 mm。调节手轮通过旋转带动滚珠丝杠的平移,实现位移的精确控制。手轮上有刻度,旋转一周共有20个大格,对应行程5 mm,每个大格有10个小格,每个小格对应的位移为0.025 mm。光纤固定采用胶带黏贴结合金属块压紧方式进行固定,能够实现光纤的可靠固定并进行多次重复实验而不破坏光纤。
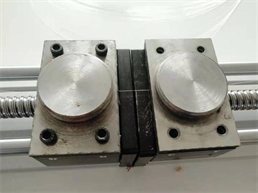
Figure 2. Defect simulation experiment device
图2. 缺陷模拟实验装置
模拟实验采用2个位移调节器固定在实验平台上,保证两个调节器的中心轴在同一直线上。实验过程中,将其中1个位移调节器的位移台固定,通过调节另外一台位移调节器的手轮来调整光纤的位置和应变变化,从而实现缺陷信号的模拟。
为了采集丰富的缺陷模拟信号,调整光纤位置和光纤上的应力进行状态组合,位移台距离分别为20、30、40、50 mm,对每个位置采用5种不同的光纤拉伸应变进行数据采集。而对于不同的光纤拉伸长度,每个拉伸长度共进行20次测量数据,应变加载值如表1所示。总计进行4 × 5 × 20 = 400组实验。

Table 1. Distributed optical fiber strain defect simulation data packet collection
表1. 分布式光纤应变缺陷模拟数据分组采集
典型的缺陷模拟信号如图3所示,图中截取了应变加载位置附近的一段数据。
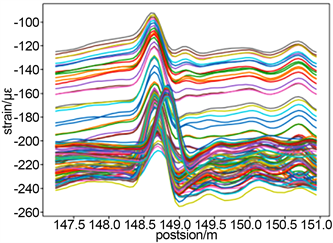 (a) 位移台距离20 mm
(a) 位移台距离20 mm 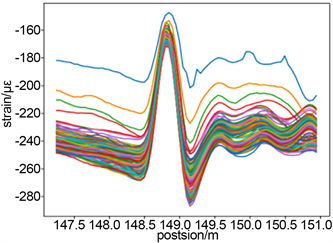 (b) 位移台距离30 mm
(b) 位移台距离30 mm 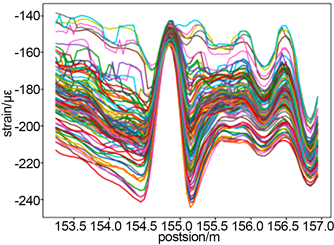 (c) 位移台距离40 mm
(c) 位移台距离40 mm 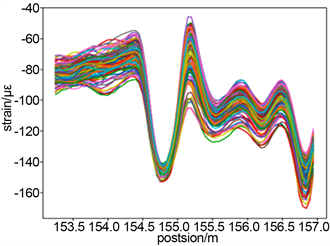 (d) 位移台距离50 mm
(d) 位移台距离50 mm
Figure 3. Strain distribution data at typical simulated defects
图3. 典型模拟缺陷处的应变分布数据
3.2. 数据处理
在缺陷模拟信号数据中,每一组数据在缺陷位置附近进行滑动加窗样本截取,从而获得缺陷样本数据集。在远离缺陷的区域进行滑动加窗,从而获得无缺陷的负样本,即没有产生缺陷的样本。对于每组实验数据,滑动窗口长度50点,每次滑动1个采样点,每个缺陷位置截取25个样本,因此总共有25 × 400 = 10,000个模拟缺陷正样本。同样在远离应变加载的区域采用同样的滑动窗口长度,每次滑动50个点,总共获得10,000个负样本。
神经网络在训练过程中,随机打散样本顺序,选取80%样本用于训练,剩余20%样本用于训练模型验证。采用分组训练增加收敛速度,batch size = 512,迭代500次,在测试集上的精度和损失变化如图4和图5所示,识别精度为99.55%,模型损失函数值为0.0352。实验表明针对模拟的缺陷信号可实现较准确的预测。
在实验过程中忽略了温度的影响。不同温度会导致局部光纤范围上散射频率的整体变化,反应在测量应变信号中对应测量值的整体漂移。由于在数据预处理过程中对信号进行了maxmin归一化,因此这种整体漂移对信号分类识别没有影响。同样的道理,当光纤上存在不同大小的初始应变时,对分类识别也没有影响。

Figure 4. Simulated defect detection classification and recognition accuracy
图4. 模拟缺陷检测分类识别精度
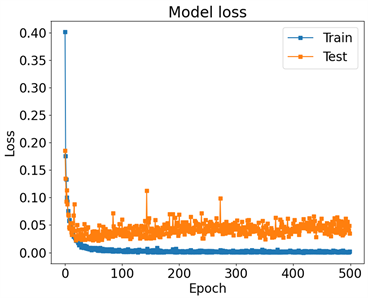
Figure 5. Simulate defect detection classification recognition loss function
图5. 模拟缺陷检测分类识别损失函数
4. 结论
本文提出了一种基于分布式光纤应变传感和深度学习的混凝土缺陷预测方法,这种方法无需对缺陷信号进行建模,可通过对样本的学习自动提取特征参数。当样本数据足够多时,可以通过深度学习的训练得到较高的预测识别精度。对于实际应用,识别的准确度与样本收集密切相关。要得到比较好的预测识别效果,需要有足够多的缺陷样本,这也是本文提出的方法在实际场应用场景中能否取得良好效果的关键。
致谢
本文研究来自中化学交通建设集团有限公司2020年度科技开发项目“桥梁墩柱盖梁大型快速拼装式模型施工技术研究”的支持,特此表示感谢。