1. 引言
中国制造是和传感器紧密相关,例如智能制造里有传感器九条龙,诸如轨道交通传感器一条龙,新能源汽车传感器一条龙等。传感器属于基础零部件的一部分,传感器非常重要,王大珩先生有个著名的论断:传感器是工业的基石、性能的关键和发展的瓶颈。随着产品的不断升级和下游行业的持续增长,传感器行业未来的发展前景十分广阔。人类每天都通过皮肤的触觉与世界进行互动,皮肤作为人体最大的器官,可感知压力、应变、温度和湿度等信息类似于人体皮肤的这些功能,触觉传感器通过多种传感器的集成,可以给触觉受损的人们提供物体的触觉反馈,帮助人们感知到材料物性、运动与相对位置及环境温度与湿度等信息,有助于智能装备行为的控制,在物联网和大数据等领域有广泛的应用。触觉传感器通常由压力传感器及应变传感器为主组成为了确保与非平整、粗糙和动态的皮肤表面的牢固贴合接触而又不妨碍日常活动,柔性视觉传感器应具有低弹性模量、高拉伸性能及良好的耐磨性,此外柔性视觉传感器还应具有高灵敏度、轻便、低成本和低功耗的特点。为了实现这些功能,具有更大的表面积和出色的材料特性以及与低成本制造工艺兼容的纳米材料被广泛用于开发柔性触觉传感器。中国制造大而不强,主要瓶颈实际上是传感器 [1]。
早在二十世纪七十年代,国际上就已开始对电子皮肤的探索与研究。近年来,经过各国科研人员的不断努力,电子皮肤的设计与开发取得了显著的进步。目前,电子皮肤种类繁多,本文主要针对本领域中的部分典型研究工作进行介绍与分析。2004年,东京大学Takao Someye等人研发了一种视觉传感器阵列,可包裹于半径2 mm的圆柱之上,并保持正常工作。2005年,Takao Someya课题组又引入渔网结构,使传感器的柔性大大增加。2011年,ZhenanBao题组将碳纳米管涂于POMS基底制作了电容式触觉传感器阵列,具有高弹性。2013年北京科技大学曹建国等利用银纳米线与PDMS复合材料设计制作了高柔弹性触觉传感器阵列,基于多孔PDMS结构,达到了触觉传感器的高柔弹性。这种触觉传感器阵列可与结肠镜集成,感知内外压力,为触觉传感器在医疗设备等复杂三维表面上的应用奠定了基础。2014年,Bao课题组利用具有空心球微结构制作了锯齿状压阻式触觉传感器阵列,可测量微小压力,灵敏度超高。2014年,意大利理工学院的Lucie Viry题组开发了一种基于电容原理的全柔性三轴力触觉传感器 [2],此传感器基于导电织物电极和高弹性材料,便于制造,加工成本低,具有良好的顺应性、鲁棒性和稳定性。这种特有的电介质多层结构和独创的材料组合方式,使传感器表现出了卓越的性能,国内学者对触觉传感器的研究也取得了很大进展。2014年,中科院张廷等人制作了电容式压力触觉传感器阵列该传感器基于单壁碳纳米管和超薄的PDMS薄膜,借助丝绸模具得到与丝缆织物微观表面反相的纹理。其制作方法简单,成本低,且灵敏度超高,稳定性好,可用于监测人体生理信号,作为疾病诊断和健康评估的重要依据。2018年合肥工业大学的黄英等人基于压敏导电橡胶制作了触觉传感器阵列可检测三维压力,并针对导电橡胶的压阻效应设计了不同的结构,其制作工艺简单,制造成本低,应用前景广阔。
触觉传感器已被使用在各式各样的机器人应用上,用以藉由操控与侦测所接触的物体。对于下一个世代而言,这是非常重要的元件对于机器人手臂用以应用于操作或抓取目标物,并且能够测量及与调整以最适当的力量来进行。当目标物体的表面碰触到机器手臂上的触觉传感器时,此传感器不仅可以侦测由压力引起的应变,还可解析力量的强度与施予的位置,藉由测量的结果来分析受负载的分布与情况 [3] [4]。
在另一方面应用目的上,大面积且可挠性的压阻式传感器已被快速发展,并整合应用于人工电子皮肤上用以侦测所接触的物体,与其表面上所受压力的强度与位置 [5]。压阻式力量传感器可感测出被施加的负载力量,其藉由测量电阻值上的变化得知。基于其各式的优点,如开发制造的可行性高、低成本,以及容易收集所侦测到的输出信号等,压阻式力量感测器(或应变规则)已被熟知与广泛应用 [6]。此外,高分子材料混合导电粉末所制备出的复合材料可被用作于感测层材料,并应用至力量侦测上。如某些高分子复合材料具有电阻器的物理特性 [7],当其用于力量感测时,能够进行机械上的负载与电讯号间的转换。
可挠性拉伸式传感器利用此C-PDMS纳米复合材料制作与应用的可行性已于先前研究验证过 [8],因此本研究将延伸此设计概念并达成具良好分散性与附着性的C-PDMS、金属膜与高分子基材,另外将更进一步制备3D微结构镶埋至可拉伸的基材内。此外,晶圆级大面积高分子铸模成型与键结接合程序将被用来实行在压阻式纳米复合材料橡胶弹性体与可挠式触觉感测等的应用。
2. 基本原理
2.1. 设计概念
可挠式触觉传感器的元件设计概念与结构组成如图1所示。此压阻式纳米复合橡胶弹性体由4个独立的感测层材料C-PDMS压敏电阻器组成如图1(a)中所示,其整体结构由绕折式图案微结构的C-PDMS (19,000 × 500 × 75 μm3)、金属薄膜(200 nm)用作电性连接与电极、PDMS触觉凸块(7.5 × 7.5 × 1 mm3)作为力量集中与传递的媒介,而弹性基材作为支撑结构(18 × 18 × 1 mm3)所共同组成。本研究设计内嵌镶埋的压敏电阻微结构于此传感器元件中,其针对所施加压力于PDMS触觉凸块上,进而造成相应的应变量来进行感测,侧向剖面结构图如图1(b)所示。
2.2. 工作原理
压阻效应及触觉感测的工作原理与机制如图2所示。当元件受到外力负载导致变形时(如:弯曲、拉伸等),此C-PDMS纳米复合材料可被用来测量电阻值的变化,藉由其高分子内部的导电路径改变,如图2(a)所示。简单来说,此C-PDMS于元件中用来当作感测材料层,其电的物理特征相当于一电阻器的特性。此元件的优点为扩展利用大面积多层铸造与堆栈程序,将压阻纳米复合材料均匀且无界面地与基材键合,制作镶埋于可挠性高分子基材中,因此可整合PDMS各方面特性的优点,如各分子间的附着、键合与交联,以及于固、液相间的单分子具有良好的同质界面交联接合等。当外加压力施予触觉凸块上,透过凸块将力量集中与传递至传感器元件上,此外力将造成感测元件产生形变,进而使C-PDMS的电阻特性改变(即C-PDMS压敏电阻的压阻效应),如图2(b)所示。
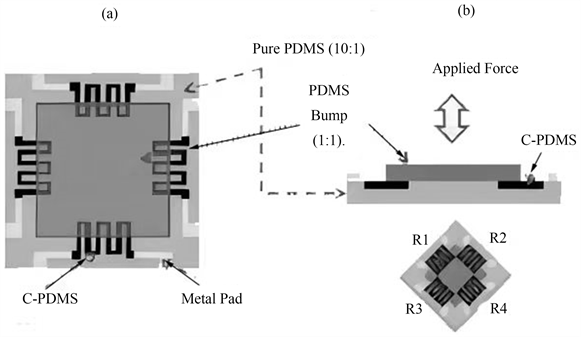
Figure 1. Tactile sensor’s structure design
图1. 触觉传感器的结构设计
本研究将呈现实行高感测灵敏度与可挠曲压阻材料的设计制造与流程,于此提出的压阻式C-PDMS橡胶弹性体可被快速整合并应用于轻巧、柔软、具弹性以及高灵敏度的机电传感器,期望用于各式微机电MEMS传感器与应用等领域。本研究提出的可挠式触觉传感器后续将制造与测量进而证明其应用的可行性。
3. 实验步骤与方法
3.1. 材料制备
溶剂润湿法制备C-PDMS纳米复合材料的工艺如图3所示。于图3(a)~(b)中,将30 wt%的纳米碳黑粉末以及PDMSbasepolymer分别与特定重量百分比的正己烷(n-Hexane)进行混合2小时。于图3(c)中,将经先前步骤各别混合的C/n-Hexane及PDMS/n-Hexane尔后彼此再进行混合1小时,的后进行加热步骤至隔夜并使溶剂挥发完全。最后,将混合完毕准备完成的C-PDMS纳米复合高分子随即加入PDMS固化剂(混合比例10:1),即完成制备C-PDMS纳米复合材料,如图3(d)~(e)中所示。
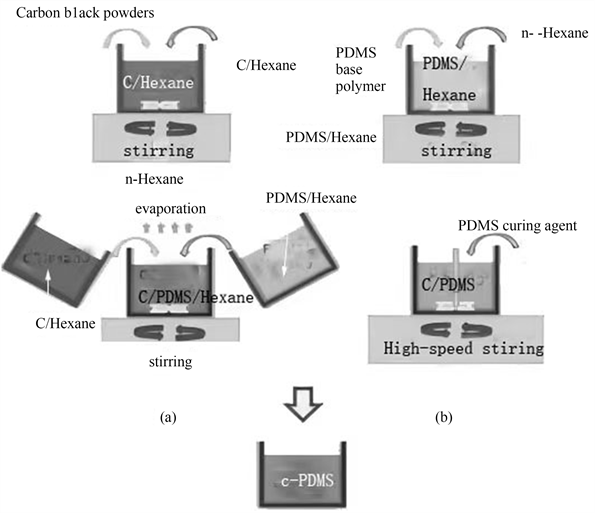
Figure 3. The preparation of nanocomposites
图3. 纳米复合材料的制备
3.2. 元件制作
微制造技术与组装程序实行传感器元件制造的流程如图4所示。首先,将抗沾黏单分子层材料1H,1H,2H, 2H-perfluorooctyltrichlorosilane (PFOTS)沉积于硅晶圆基材上,其后将先前完成制备的C-PDMS纳米复合材料藉由硬式蒸镀屏蔽(ShadowMask)搭配网版印刷技术工艺沉积于经表面处理完毕的硅基材上,如图4(a)~(c)所示。尔后,将一层膜厚的PDMS高分子材料铸造于已沉积C-PDMS纳米复合材料的硅基材上。进行移除底下的硅晶圆基材,即可将C-PDMS纳米复合材料转移至PDMS基材上,如图4(d)~(e)所示。于图4(f)~(g)中所示,再透过硬式蒸镀屏蔽将3-mercaptopropyltrimethoxysilane PDMS触觉凸块(混合比例1:1)接合于PDMS基材上,即完成整体触觉传感器元件的制造,如图4所示。于此,其他3D微结构亦可藉由多层铸模与多层堆栈程序来达成。
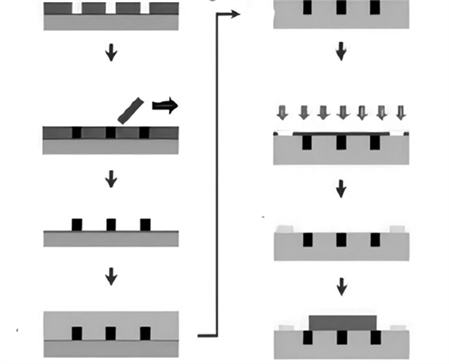
Figure 4. Technological process of the tactile sensor element
图4. 触觉传感器元件的工艺流程
 (a) C-PDMS传感器材料沉积于硅晶圆上;(b) 多层铸模与堆栈并转移至弹性基材支撑结构上;(c) 金属薄膜沉积于高分子基材上;(d) 制备完成的可挠性传感器元件
(a) C-PDMS传感器材料沉积于硅晶圆上;(b) 多层铸模与堆栈并转移至弹性基材支撑结构上;(c) 金属薄膜沉积于高分子基材上;(d) 制备完成的可挠性传感器元件
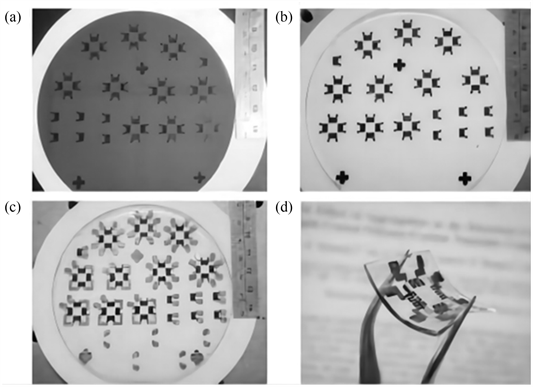
Figure 5. Large wafer level components manufacturing
图5. 大面积晶圆级元件制造
4. 结果与讨论
4.1. 表面形貌特征
图5(a)~(c)分别呈现传感器元件制作过程的结果,其结果图片可各别对应到图4(c)、图4(e)及图4(g)的工艺结果。图5(a)为C-PDMS纳米复合材料使用硬式蒸镀屏蔽搭配网版印刷技术,经图型设计与制作沉积于硅晶圆基材上的工艺结果图。图5(b)为已沉积C-PDMS纳米复合材料进行移除底下的硅基材后转移至PDMS基材上。而随后,经大面积晶圆级蒸镀(PVD)将金薄膜沉积于PDMS基材上,以定义及制备金属走线与电极,如图5(c)所示。图5(d)为最后制作完成的可挠式感测元件,其后续将进行各式受力负载与挠曲的测试。图6为电子显微镜SEM的图片,其进一步放大倍率显示镶埋于PDMS高分子基材的C-PDMS纳米复合材料的压敏电阻。藉由使用多层铸模与多层堆栈程序,可实行将纳米复合材料直接且均匀地制备于可挠性高分子基材中,经高分子聚合最终可呈现随后可将C-PDMS纳米复合材料的压敏电阻镶埋至PDMS基材中,侧视剖面图如图6(a)所示。经加热处理以进行高分子聚合程序,最后,完成感测材料与元件固化键合后的上视图如图6(b)所示。
 (a) 侧视剖面图
(a) 侧视剖面图  (b) 上视图
(b) 上视图
Figure 6. C-PDMS varistor embedded in SEM polymer base material
图6. C-PDMS压敏电阻镶埋于高分子基材的SEM
4.2. 电的物理特性
图7为制备完成C-PDMS纳米复合材料的电阻特性与欧姆电流–伏特(OhmicI-V)特征曲线测量结果。实验测量结果如图7(a)所示,C-PDMS压敏电阻的电阻特性藉由不同样本数量进行测量与统计,其平均电阻值为~0.95 MΩ (计算后相对应的电阻率(ρ)为~1.88 Ω-m)。图7(b)为施加一直流偏压用以测量C-PDMS纳米复合材料的电流值。
 (a) 电阻特性
(a) 电阻特性 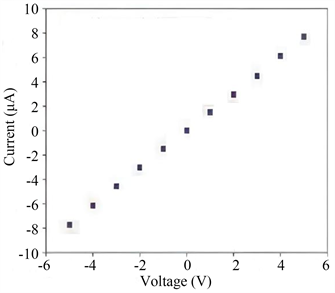 (b) 欧姆电流–伏特曲线
(b) 欧姆电流–伏特曲线
Figure 7. Volt-ampere characteristic measurement results
图7. 伏安特性测量结果
由于此C-PDMS纳米复合材料具导电特性,故可藉由一供电源(Keithley2400)施加一直流偏压于待测试的元件上,以测量其输出电流值得到相对应的电流–伏特特性。于图7(b)测量数据图在线的斜率即为C-PDMS压敏电阻的相对应欧姆电流–伏特特性,其经测量所得到的对应值为~1.53 μA/V。
4.3. 传感器性能
触觉感测元件测试与相对应的电阻变化分率(fractional Changein Electrical Resistance, ΔR/R0)测量结果如图8所示。透过一推拉力计(ForceGauge, FSH-5N, YOTEC)用作指定施加与监控于元件上施以力量负载,此推拉力计的探测头的直径尺寸为~5 mm,直接接触待测元件上的触觉凸块,而施加的力量负载则透过触觉凸块将力量集中并传递到感测元件上,元件测量的输出讯号则藉由一商用数字源表(Source Meter, Keithley 2400)进行讯号收集与记录。
 (a) 贴附于平坦表面上
(a) 贴附于平坦表面上 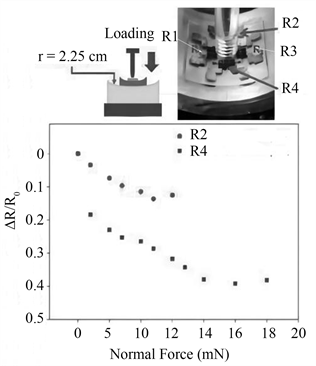 (b) 于弯曲表面上(r = 2.25 cm)
(b) 于弯曲表面上(r = 2.25 cm)
Figure 8. Positive stress load test measurement results
图8. 正向受力负载测试的测量结果
首先,本研究先进行传感器元件贴附于一平坦表面上的触觉力量负载测量,所贴附的平台表面为一平坦的金属刚体结构,其测量实际架构图如图8(a)所示。图8(a)所示的实验测试为测量电阻值变化ΔR/R0与所施加正向力负载间的关系,此C-PDMS压敏电阻元件(R1~R4)的触觉感测灵敏度平均分别为~4.3%、~2.92%、~4.36%及~4.45% (ΔR/R0/mN),其于有效的测量范围为0~15 mN。
此外,本研究也进行可挠式传感器元件贴附于一弯曲表面上的触觉力量负载测量,当进行挠曲传感器测量时,所贴附的平台为一具弯曲表面的金属材料刚体,其弯曲的曲率半径为r = 2.25 cm。测量结果如图8(b)所示,为C-PDMS压敏电阻元件(R2与R4)的电阻变化分率ΔR/R0与所施加正向力负载间的关系,其触觉感测灵敏度的测量结果平均分别下降至~0.98%及~0.92% (ΔR/R0/mN),其有效的测量范围为0~15 mN。有鉴于此,当传感器贴附使用于一具弯曲的表面上,此可挠性传感器的感测敏灵度可能会显著地下降好几倍。造成此结果可能原因为C-PDMS压敏电阻R2/R4与R1/R3分别被对齐排列于不同方向上,如图1所示,其当进行正向力负载并透过触觉凸块借以传递力量分布进行测量时,各C-PDMS压敏电阻其主要的形变方式为纵向方向的延长拉伸,但已经过预变形的传感器基材,其将分别产生各式不同复杂的形变状况影响于R2/R4与R1/R3压敏电阻上,于此议题未来将会更深入进行研究与探讨。综合以上所述,本研究已证实此可挠性压阻式纳米复合橡胶弹性体可应用于侦测力量的触觉感测,其测量结果显示出此元件能被应用于可折叠、变形、弯曲、拉伸与穿戴式装置等方面,甚至可整合与实行至触碰感应于机器人与义肢等应用领域上。
5. 结论
本研究呈现一压阻式纳米复合橡胶弹性体的触觉感测器,其由Carbon-black (26 nm)填充至PDMS (Sylgard184)高分子材料,经由溶剂n-Hexane改善其均匀度与分散性,藉此形成导电高分子纳米复合材料,其具有电的物理特性。此元件具有以下特性与优点:1) 使用多层铸模与多层堆栈程序实行纳米复合材料直接且均匀地制备于可挠性高分子基材中;2) 可快速成型且制备时间短;3) 可大面积生产与低成本制造,并且验证其功能特性与触觉感测的应用。于实验验证中,藉由施以一外力造成应变来测量电阻变化分率,其测量的项目包含弯曲形变与正向受力的测试。经由测量的30 wt% C-PDMS纳米复合材料其电阻率(ρ) 为~1.88 (Ω-m)。于正向力负载测量中,此感测元件贴附于平坦表面上其测量灵敏度(R1~R4)分别为~4.3%、~2.92%、~4.36%及~4.45% (ΔR/R0/mN);于弯曲表面上(r = 2.25 cm)其测量灵敏度(R2与R4)变为~0.98%、~0.92% (ΔR/R0/mN)。本研究利用晶圆级聚合物铸模成型与键合工艺,实现大面积制造的压阻式纳米复合橡胶弹性体于可挠曲电子的应用,其元件的刚性可藉由调整高分子材料的交联混合比例进行调整。简而言之,本研究提出的压阻式纳米复合橡胶弹性体可应用于挠曲式电子与微机电触觉感测元件,并可实现与整合用于人体皮肤贴附、机器人与义肢等方面的力量感测与触控等应用领域。
致谢
浙江省教育厅项目(Y202148008)给予资助。