1. 引言
中置电动助力自行车作为城市用电动助力自行车的一支,因其动力性能优异,骑行舒适而广受欢迎 [1] [2]。而减速器作为中置电动助力自行车的核心部分,其动态性能对整车性能及骑行体验的影响最为直接。
截至目前,关于中置电动助力自行车减速器的设计研究,国内外已有部分学者取得了实质性的进展。陈舒妤等 [3] 采用链轮减速器作为电动助力自行车的驱动部分,这种减速器结构紧凑,便于安装,但其结构较为复杂,极大提高了研究的成本。吴上生等 [4] 采用谐波减速器研究提出一种新型中置驱动装置,该驱动装置具有较好的传动性能,能实现更加舒适的助力骑行,但该结构易于发生疲劳破坏,散热性能差。郑红梅等 [5] 通过对渐开线少齿差行星齿轮减速器动力学仿真的研究,总结出齿轮内啮合过程中啮合力的动态变化规律。刘文吉等 [6] 采用齿廓修形改善了少齿差行星传动中的振动冲击状况。Bu Zhonghong等在行星齿轮模态特性 [7]、振动模式 [8] 方面的成果显著。
本文创新性地采用了渐开线少齿差行星齿轮减速器 [9] [10] [11] 作为中置电动助力自行车的驱动部分,主要针对减速器进行固有特性理论分析,仿真减速器固有振型,确保整车正常行驶过程中不会有共振现象发生。研究减速器振动加速度,进行振动特性仿真。并设计电动助力自行车减速器振动测试试验,搭建专属试验平台,模拟整车行驶常见工况进行分组测试,为推动中置电动助力自行车的研究提供重要参考。
2. 渐开线少齿差行星齿轮减速器
本文动力总成传动系统选用2K-H型少齿差减速器,减速器整体结构如图1所示,主要构成为:偏心轴,双联齿轮(输出端内齿轮和输入端外齿轮一体化结构)、输出轴齿、固定内齿轮。另外,设计减速比
。
渐开线少齿差行星齿轮减速器传动原理:固定齿轮4与机座相连,其中心与偏心轴的非偏心部分轴线相重合,偏心轴通过轴承与双联齿轮进行配合,且偏心轴作为行星架,与电机的输出端相连。当电机带动偏心轴旋转,偏心部分会产生偏心力,在其作用下轴承沿径向使双联齿轮作偏心运动。并且由于固定齿轮与机座相连接,无法转动,将会导致双联齿轮能绕其旋转,因此,双联齿轮既有公转,又有自转(行星运动)。2K-H型减速器齿数相差较小,因此双联齿轮将围绕输入端偏心轴的中心作反向低速自转运动。当双联外齿轮按上述运动与固定内齿圈啮合时实现了第I级传动,双联内齿轮与输出齿轮啮合时实现第II级传动 [9] [10]。
3. 减速器有限元模态分析
对该少齿差行星减速器进行有限元自由模态分析,得到了其固有频率和模态振型,为行星减速器优化系统结构与传动参数、分析振动与噪声特性,避免共振、降低噪声、改善工作性能提供参考。
在进行仿真之前,需对仿真对象进行简化,将简化后的模型以.stp的格式导入到ANSYS Workbench软件中求解模态,各主要零件的材料属性设置如表1所示。网格划分共生成125,160个节点,68,165个单元(图2)。

Table 1. Reducer material property setting table
表1. 减速器材料属性设置表
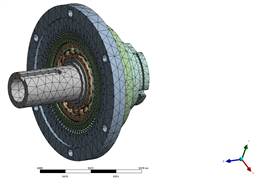
Figure 2. Reducer meshing model diagram
图2. 减速器网格划分模型图
模型创建后,需定义构件间正确连接方式,并进行合理约束。根据少齿差减速器各零件间的配合关系,现作出以下约束:约束偏心轴与等效支撑轴承内圈为转动副,即限制两者5个方向自由度,仅保留轴向转动自由度;设置双联齿轮内圈、输出轴齿内圈与等效支撑轴承的圆柱外圈为绑定约束;设置固定内齿圈为固定约束;设置齿轮接触面为摩擦约束。
据模态分析理论,低阶频率范围容易和外界条件耦合,即低阶振型对结构振动及动力学特性影响相对较大,因此提取前8阶固有频率及模态振型情况如表2所示。该模态振型表明,主要的振动变形发生在双联齿轮内齿轮和输出轴齿上,对双联齿轮:1~4阶振型为整体平移,5~8阶振型为整体摆动及扭转变形;对输出轴齿:1~3阶无明显变形,4~8阶为整体摆动及扭转变形。可由于固定齿轮和偏心轴被完全约束,除高阶有微小振动变形外,低阶基本无变形。
减速器在给定工况下运转,主要考虑其内部激励,即内部参量激励的轮齿啮合动力激励,运用公式 [12] 进行渐开线少齿差行星齿轮减速器的内部激励频率计算。根据计算结果,针对电动助力自行车最高设计时速25 km/h,此时电机输入转速为2600 r/min,啮合频率为3380 Hz,该齿轮系统前8阶固有频率与其均无接近频率,因此正常运转下不会出现转动频率或啮合频率与固有频率合拍而发生共振的现象(图3、图4)。
Table 2. The 1st to 8th modes of planetary gear reducer
表2. 行星齿轮减速器第1~8阶模态
4. 减速器振动特性仿真分析
选取电动助力自行车两种常见工况即负载为60 N∙m的前提下,输入转速分别为2000、2600 r/min,分别选取减速器固定齿轮节点9235、双联齿轮外齿轮节点106,569、双联齿轮内齿轮节点11,597、输出齿轮节点71,934,使用ANSYS Workbench软件的迭代求解。减速器水平径向和垂直径向振动加速度值由重力导致且较为接近,轴向加速度较小不能直接反应减速器振动情况,因此本文选择测试3向综合加速度研究减速器振动。
 (a) 固定齿轮振动加速度
(a) 固定齿轮振动加速度  (b) 双联齿轮外齿轮振动加速度
(b) 双联齿轮外齿轮振动加速度 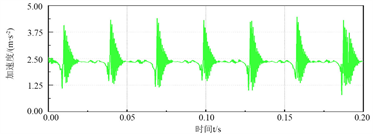 (c) 双联齿轮内齿轮振动加速度
(c) 双联齿轮内齿轮振动加速度  (d) 输出齿轮振动加速度
(d) 输出齿轮振动加速度
Figure 5. 2000 r/min, 60 N∙m fixed gear, double gear external gear, double gear internal gear, output gear vibration acceleration
图5. 2000 r/min,60 N∙m固定齿轮、双联齿轮外齿轮、双联齿轮内齿轮、输出齿轮振动加速度
结合图5可知,固定齿轮振动加速度幅值为2.2 m∙s−2,双联齿轮外内齿轮幅值分别为4.8、4.5 m·s−2,输出齿轮振动加速度幅值为1.9 m∙s−2。双联齿轮外、内齿轮振动加速度均值分别为2.39、2.36m∙s−2,双联齿轮因齿数相同且为一个整体,因此振动情况相似。固定齿轮振动加速度均值为0.32 m∙s−2,因其固定,故仅在轮齿啮合时产生较小振动加速度。输出齿轮振动加速度均值为0.3 m∙s−2,振动较为稳定。
 (a) 固定齿轮振动加速度
(a) 固定齿轮振动加速度  (b) 双联齿轮外齿轮振动加速度
(b) 双联齿轮外齿轮振动加速度 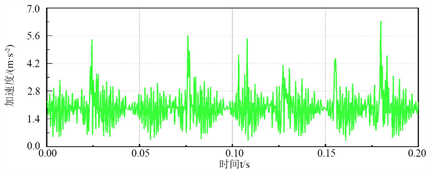 (c) 双联齿轮内齿轮振动加速度
(c) 双联齿轮内齿轮振动加速度  (d) 输出齿轮振动加速度
(d) 输出齿轮振动加速度
Figure 6. 2600 r/min, 60 N∙m fixed gear, double gear external gear, double gear internal gear, output gear vibration acceleration
图6. 2600 r/min,60 N∙m固定齿轮、双联齿轮外齿轮、双联齿轮内齿轮、输出齿轮振动加速度
结合图6可知,固定齿轮振动加速度幅值为3.5 m∙s−2,双联齿轮外内齿轮幅值分别为5.9、6.3 m∙s−2,输出齿轮振动加速度幅值为5.4 m∙s−2。固定齿轮振动幅度随转速增加而加大,频率变快,振动较为稳定且呈现周期性;双联齿轮外齿轮随转速增加振动波动较大,主要因为偏心轴对轮齿啮合冲击随着转速增大而加剧;双联齿轮内齿轮振动情况与双联齿轮外齿轮较为接近;输出齿轮振动出现较大波动。输入转速接近峰值,减速器整体波动增幅较大。
仿真结果表明,在某些时间出现较大加速度响应幅值,且呈现周期性,这是由于偏心轴偏心运动后,轮齿和轴承产生啮合冲击和滚珠冲击。通过2种常见工况振动加速度对比,可知随着输入转速增加,固定齿轮,双联齿轮振动幅度增加,且振动频率加快。由于大传动比,输出齿轮振动加速度幅值在正常工况下变化不大,接近输入转速峰值时振动加剧,振动特性由较为稳定表达转向更为明显的啮合冲击。综上所述,减速器振动情况受转速影响较大,偏心轴对轮齿啮合冲击,滚珠冲击随转速增加而增大,导致减速器振动加剧,冲击幅值增大。
5. 减速器振动实验验证
5.1. 实验方案
根据国家标准《齿轮装置的验收规范第2部分:验收实验中齿轮装置机械振动的测定》,依据需要测定的数据设计减速器振动测试试验方案,渐开线少齿差行星齿轮减速器振动实验台如图7所示,振动测试实验中选用的传感器为IEPE压电式加速度传感器布置如图8所示。本文提供一种新的思路进行振动测试,采用蓄电池作为驱动源、骑行台提供阻力模拟的中置电动助力自行车真实行驶振动情况。
5.2. 实验结果与分析
选用江苏东华测试技术有限公司的DH5922型动态信号采集仪对采集到的加速度信号进一步处理和分析,得到实验结果如图9所示。通过对中置电动助力自行车两种常见工况即输入转速分别为2000、2600 r/min时不同驱动方式振动加速度的测量,研究不同驱动方式对减速器的振动影响。
1) 直流电源驱动下2000、2600 r/min时减速器振动加速度时域响应及幅值谱曲线图如图9所示

Figure 7. Reducer vibration test bench
图7. 减速器振动测试实验台
 (a) 2000 r/min振动加速度时域响应
(a) 2000 r/min振动加速度时域响应 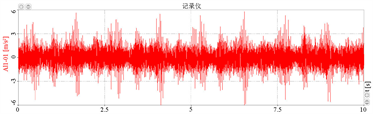 (b) 2600 r/min振动加速度时域响应
(b) 2600 r/min振动加速度时域响应 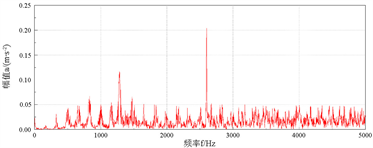 (c) 2000 r/min振动加速度幅值谱
(c) 2000 r/min振动加速度幅值谱 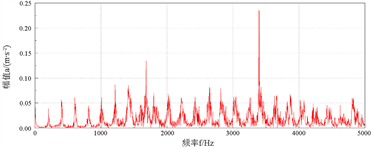 (d) 2600 r/min振动加速度幅值谱
(d) 2600 r/min振动加速度幅值谱
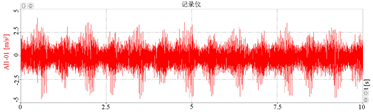
Figure 9. Time-domain response and amplitude spectrum curve of reducer vibration acceleration at 2000 and 2600 r/min driven by DC power
图9. 直流电源驱动下2000、2600 r/min时减速器振动加速度时域响应及幅值谱曲线图
使用直流电源驱动时,2000、2600 r/min时最大振动加速度分别为3.9、5.9 m/s−2,平均振动加速度分别为1.3、1.6 m/s−2,可见随输入转速的增加减速器振动情况加剧。
由图9可知,响应结果表现为在某一频率出现冲击性幅值。两啮合齿对齿数相差不大,因此同转速下啮合频率相差不大,当输入转速为2000、2600 r/min时,齿对转频分别为33、43 Hz,啮合频率分别为2600、3380 Hz。对于图示振动加速度幅值谱,在1/2倍啮合频率(1283、1700 Hz)处出现较小峰值,在1倍啮合频率处(2600、3400 Hz)处出现峰峰值,峰值以33、43 Hz为边频带左右出现较小峰值,与啮合频率计算结果基本相符,减速器振动情况较为稳定。
2) 蓄电池驱动下2000、2600 r/min时减速器振动加速度时域响应及幅值谱曲线图如图10所示
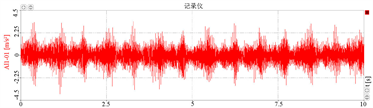 (a) 2000 r/min振动加速度时域响应
(a) 2000 r/min振动加速度时域响应  (b) 2600 r/min振动加速度时域响应
(b) 2600 r/min振动加速度时域响应  (c) 2000 r/min振动加速度幅值谱
(c) 2000 r/min振动加速度幅值谱  (d) 2600 r/min振动加速度幅值谱
(d) 2600 r/min振动加速度幅值谱
Figure 10. Time-domain response and amplitude spectrum curve of reducer vibration acceleration under battery drive at 2000 and 2600 r/min
图10. 蓄电池驱动下2000、2600 r/min时减速器振动加速度时域响应及幅值谱曲线图
使用蓄电池驱动时,2000、2600 r/min时最大振动加速度分别为3.4、4.8 m/s−2,平均振动加速度分别为1.2、1.4 m/s−2,可见随输入转速的增加减速器振动情况加剧。
由图10可知,使用锂电池作为驱动源时,2种工况下减速器振动加速度幅值略微减小,同时在1/2倍啮合频率(1306、1695 Hz)处出现较小峰值,在1倍啮合频率处(2608、3390 Hz)处出现峰峰值,系统振动情况呈现规律性,整体较为稳定。
综合上述两种驱动方式下减速器振动情况,可知使用蓄电池驱动时减速器振动幅度小于使用直流电源驱动,蓄电池作为动力源时电流、电压均较小,输入较为稳定,减小了减速器的振动情况,可见使用蓄电池作为驱动电源研究减速器振动更符合实际情况。
6. 结论
本文以中置电动助力自行车减速器为研究对象,对其动态特性、振动进行仿真分析,最后对振动特性进行测试。得出如下结论:
1) 建立减速器虚拟样机模型,对减速器固有特性、振动特性仿真。仿真结果显示,在常见工况下,减速器固有频率和两齿对啮合频率无接近数值,即不会发生共振现象,可以判断减速器具有良好的结构动态特性。
2) 开展了减速器振动测试。按照2常见工况对不同驱动方式下其进行测试,振动幅度随转速的增加逐渐加大,2种工况下,使用蓄电池驱动振动幅度均小于直流电源驱动,说明蓄电池电流、电压较小且稳定,对振动有抑制作用。且减速器振动加速器仿真与实验结果基本一致,随着转速的增大,振动幅度逐渐增加。
NOTES
*通讯作者。