1. 引言
近年来各国城市化进程加速推进,特大城市迅速增长已成为全球特点 [1],人们对快速和便捷的交通需求也日益增大 [2]。地铁作为缓解城市交通压力的重要工具,其成为国家基础设施建设的重点和热点之一 [3]。地铁在长期的运营过程中难免会由于各种因素导致隧道结构发生形变,从而危及城市轨道交通系统的正常运营,因此一套行之有效的变形监测方法,对保证城市轨道交通系统稳定高效运转非常必要。
传统的人工监测存在费时费力效率低、时效性差、人为误差多等弊端,因此越来越多的学者进行了地铁自动化监测相关研究。吴石军将智能型全站仪自动化监测技术应用于地铁隧道变形的实时监测,结果表明该技术能够及时、准确地为地铁工程建设或运营维护提供有效的数据支持 [4] [5]。金乐乐等将物联网技术与全站仪自动监测技术相结合,设计出物联网下基于边缘计算的全站仪自动监测总体方案,建立了基于边缘计算的全站仪自动监测系统,并对长时间监测成果进行统计分析,验证了系统的可行性 [6] [7]。
地铁自动化变形监测系统在不同项目上取得了较好地应用,具有精度高、效率高、人工成本低等优点。
某城市轨道交通既有线受外部地质钻孔施工干扰,致使盾构隧道管片受损,隧道壁出现渗漏水现象,同时有少量泥沙石进入隧道。管片破损、裂缝会降低结构的承载力,严重时导致衬彻结构失稳 [8] [9]。为确保地表和盾构隧道安全,本文采用Leica TM50对受扰动区段进行平面及竖向位移自动化变形监测,并采用改进的卡尔曼滤波算法对数据进行处理,将误差限制在一定范围,以实时准确掌握外部施工对既有地铁隧道结构产生的变形影响,为地铁维保单位提供数据支撑。
2. 地铁自动化变形监测系统
地铁自动化变形监测系统主要由数据采集、数据传输、供电及软件系统等子系统组成,典型系统框架如下(图1):
1) 数据采集系统
监测工作的主要目的是掌握变形体的变形数据,因此采集系统主要由测量机器人担当。通过提前规划好监测频次、观测测回、测点学习等等流程,测量机器人即可接收控制中心监测平台的指令按既定流程进行自动化的监测,对角度、距离等基本观测数据进行采集。
2) 数据传输系统
数据传输系统将数据采集系统所获取的角度、距离等观测值实时传输,其采用的传输通信手段主要分为基于光纤通信电缆的有线传输方式和基于微波、无线网络(GPRS)等技术的无线传输方式。
3) 供电系统
自动化监测系统的供电主要有220V市电和独立太阳能光伏供电系统。本工程位于既有线隧道内,用电方便。因此使用220V市电供电。
4) 软件系统
本工程采的软件系统主要为徕卡GeoMoS,其是一套徕卡公司推出的专门用于永久监测物体位移(如建筑物、隧道、边坡等)的自动化监测软件,包括监测模块和分析模块。该软件可以根据用户设定的限差对观测数据及结果进行比对,若发现观测数据超出设定的限差,软件系统会按照用户定义的方式告警。
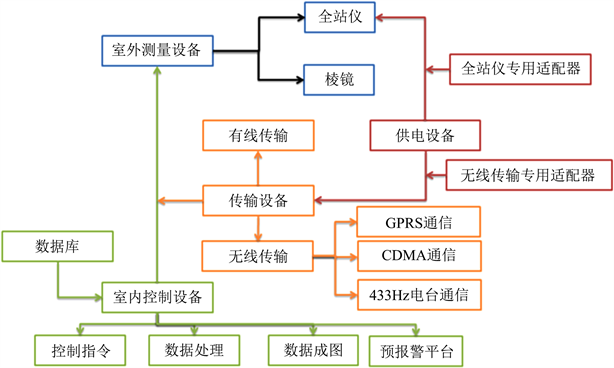
Figure 1. Construction of automatic monitoring system based on intelligent measuring robot
图1. 基于智能型测量机器人的自动化监测系统构成
3. 改进的卡尔曼滤波变形监测数据处理方法
格卡尔曼滤波基本思想是在一个处于动态变化的系统中,先利用模式获取模型状态的先验估计,再将外界的影响因素作为观测值对模型状态进行重新估计,获取误差方差最小的模型状态的后验估计。
假设模型是线性的,模型状态的先验估计和观测误差符合高斯分布,通过卡尔曼滤波可以获取模型状态的后验估计。卡尔曼滤波在滤波过程中执行模型状态预测和更新两个步骤,模型状态预测的计算如下:
(1)
其中
表示在
时刻预测的模型状态向量;
表示t时刻的后验估计模型状态向量;W表示算子;
表示模型预测误差,其满足均值为0,协方差为q的高斯分布。现在我们有了一个预测矩阵来表示下个时刻的状态向量,再引入误差协方差的更新过程如下:
(2)
其中
表示
时刻预测状态误差协方差;
表示t时刻后验估计的状态误差协方差。
此时已经完成了模型预测,接下来导入外部因素(观测值),对模型预测进行修正。利用观测值修正模型状态的方程如下:
(3)
其中
表示观测向量,
表示模型状态向量与观测值之间的转换矩阵;
作为观测误差协方差满足均值为0,方差为r的高斯分布。
(4)
其中
表示卡尔曼增益,用于平衡观测值和预测值间的权重,减少更新状态向量的不确定性。
可用以下公式表示:
(5)
时刻的后验估计的状态误差协方差
的计算方法如下公式所示:
(6)
其中I表示单位矩阵。
在本文中,为了检验卡尔曼滤波中所使用的指定误差标准差的适用性,我们使用归一化创新(Normalized Innovation, NI)序列。假设所有的误差都是相互独立且满足高斯分布(这可能是真的,也可能不是真的),如果滤波在最小方差意义下是最优的,NI序列应该满足均值为零,标准差为1的标准高斯分布 [10]。如果这些假设没有完全被实现,那么利用集合平均估计
,计算测量值在t时刻的平均NI序列可以表示为:
(7)
式中,分子是表示观测值yt与预测观测值
之差,分母是观测预测误差协方差(背景误差)与观测误差协方差组合的平方根。然后,利用观测平均NI序列计算NI的时间平均值(
)和时间标准差(
)。最后选择平均值最接近于0,标准差最接近于1的观测预测误差协方差作为状态更新过程中使用的观测误差协方差
。
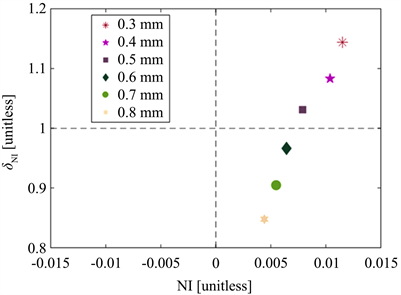
Figure 2. NI sequence statistics of transverse displacement Kalman filter for subway. Different marks represent different standard deviation of observation error (0.3 mm~0.8 mm)
图2. 地铁横向位移卡尔曼滤波NI序列统计图。不同标记表示不同的观测误差标准偏差(0.3 mm~0.8 mm)
对卡尔曼滤波状态更新过程中观测误差标准差的不同值(从0.3 mm到0.8 mm)进行测试,计算横向位移的
和
。如图2所示,采用不同观测误差标准差计算得到的值均大于零。这表明相对于观测值预测值存在偏差,随着测量误差标准差的增大,
有减小的趋势而且趋进于零。也就是说,在状态更新的过程中,由于测量值存在噪声,降低测量值的权重,可以得到更准确的估值。例如,在图2中,当标准差为0.5 mm或0.6 mm时,测量数据在状态更新过程中可以占有适当的权重,从而获得更准确的滤波结果,本文中选择0.6 mm作为卡尔曼滤波更新过程中的标准差。
4. 监测实例
4.1. 监测目的
某城市轨道交通既有线工程段区内地形平坦,地面建筑物密集,段内无不良地质作用,拟建场地范围内地下水水量丰富,总体工程地质条件差 [11]。盾构隧道处顶部标准块管片受外部地质钻孔施工干扰,致使盾构隧道管片受损,加之线路范围内地下水含量丰富,隧道壁出现渗漏水现象,隧道内进入大量砂石、泥沙,渗漏水严重,受损部位位于手孔附近,受损孔洞范围大小约为140 mm × 180 mm。按照整治设计要求,在施工区域附近先进行降水,降水后在隧道顶开挖基坑进行堵漏和管片修补。为确保地表和盾构隧道安全,采用Leica TM50智能型测量机器人对受扰动区段进行平面及竖向位移自动化变形监测,以实时掌握外部施工对既有地铁隧道结构产生的变形影响,利用自动化监测数据指导现场施工,及时采取紧急措施,遏制事态恶化,保障地铁运营安全 [8]。
4.2. 自动化位移监测实施
1) 监测断面及监测点布设
在重点监测里程范围内按照5 m间距布设监测断面,总共4个断面,断面编号分别为C03、C04、C05和C06。如图3所示每个断面布设5个监测点,分别布设在拱顶、拱腰和轨道板两侧。根据现场踏勘及结合理论计算,将测量机器人架设在监测范围外隧道侧壁稳定处,监测点棱镜朝向小里程端,保证上行列车运行时无棱镜反光影响。监测点直接在隧道结构上打孔,采用膨胀螺栓将L型棱镜固定在每个测点上。
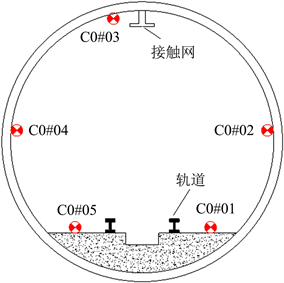
Figure 3. Schematic diagram of location layout of monitoring points
图3. 监测点位布设示意图
2) 监测基准点布设
地铁隧道结构的变形监测主要关注的是被监测区间相对区间两侧的水平和竖向位移,因此将工作基点设置在施工影响范围外或病害段之外(约60米)的隧道侧壁,为了保证变形监测网的稳定性,在监测段落外的稳定区域共布设6个基准点,分别布置于远离变形区的大里程方向和小里程方向各3个。为了保证变形监测控制网的可靠性,各个基准点分散交错一定的角度及距离。基准点需埋设稳固,保证在整个监测过程中不被破坏,为监测系统提供稳定的参考系。
3) 全站仪布设
全站仪观测站、工作基点是整个系统的原始基准,点位布设需稳定可靠,以防止点位变形;点位周围无遮挡及干扰。测站是自动化监测的工作基点,其安装的稳定性也至关重要。在监测环境中根据现场情况进行合理布设,且不能超出车辆限界。
4) 监测数据采集、传输与分析
本次自动化监测利用无线网络(GPRS)传输模式进行数据传输,自动化监测数据采集、传输与分析示意图如图4所示,当外部施工影响监测对象产生位移时,测量机器人可以及时捕捉监测点的位移变化,并通过无线网络将监测数据发送至服务器,GeoMos软件实时对监测数据进行处理分析,输出监测成果曲线。
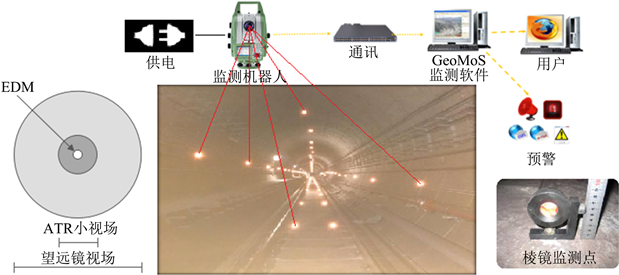
Figure 4. Schematic diagram of automatic monitoring data acquisition, transmission and analysis
图4. 自动化监测数据采集、传输与分析示意图
4.3. 预警及对策
通过对自动化监测数据进行处理和分析,当监测结果显示变形值或变化速率达到或超过预警值时,及时向各相关部门、相关单位报告,以指导地铁的运营及破损管片维修作业。根据《城市轨道交通结构安全保护技术规范》(CJJ/T202-2013),结合本项目外部作业影响等级,确定水平及竖向变形监测预警限值如下表1所示:

Table 1. Deformation monitoring and warning limits
表1. 变形监测预警限值
当某些监测点监测结果达到或超过警戒值时,应对变形原因进行分析,并按照表2中对应措施第一时间进行处置。
Table 2. Early warning countermeasure table
表2. 预警对策表
5. 监测结果分析
5.1. 测点位移精度分析
基于试验原始观测数据,利用GeoMos自动化监测数据处理系统进行数据处理,解算出各周期的监测成果。分别选取水平位移方向测项、垂直位移方向测项对0.5 TM50的监测点成果数据进行统计分析,分别计算出水平位移方向及垂直位移方向监测成果精度。将监测成果进行分析,以距离为横轴、中误差为纵轴作中误差随监测点到工作基点的距离变化关系的曲线图,如图5所示。
由图5的结果可知,采用0.5 TM50全站仪的水平位移测量中误差区间为0.31~0.47 mm,垂直位移测量中误差区间为0.30~0.68 mm,全站仪监测成果精度均比较稳定,且都能保证百米1 mm的监测精度要求;同时,水平方向上的成果精度明显高于垂直方向。

Figure 5. Relation between displacement accuracy and distance of 0.5 TM50 monitoring point
图5. 0.5 TM50监测点位移精度与距离关系
5.2. 测点位移监测结果分析
5.2.1. 水平位移监测结果分析
水平位移监测结果按线路方向分为纵向和横向位移进行分析,横向位移为正表示监测点往大里程方向右侧移动,纵向位移为正表示监测点往大里程方向移动。采用自动化监测系统获取的监测断面C03至监测断面C06的监测结果,2021年5月30日至2021年7月22日的累积纵向及横向位移如图6和图7所示。图6中显示最大纵向位移位于C05断面的5号点,最大位移为−0.8 mm;其余点的纵向位移较小,都在−0.8~0.2 mm,均在预警值(6 mm)以内。图7中显示最大横向位移位于C05断面的5号点,最大位移为−0.8 mm;其他点的横向位移均较小,均在预警值以内。此外,C03至C06断面的横向位移在六月上旬有较为显著的变化(原因分析见4.3),但变形值远小于预警值。因此,因外部违规地质钻孔导致管片受损引发的隧道结构纵向变形处于安全可控范围。
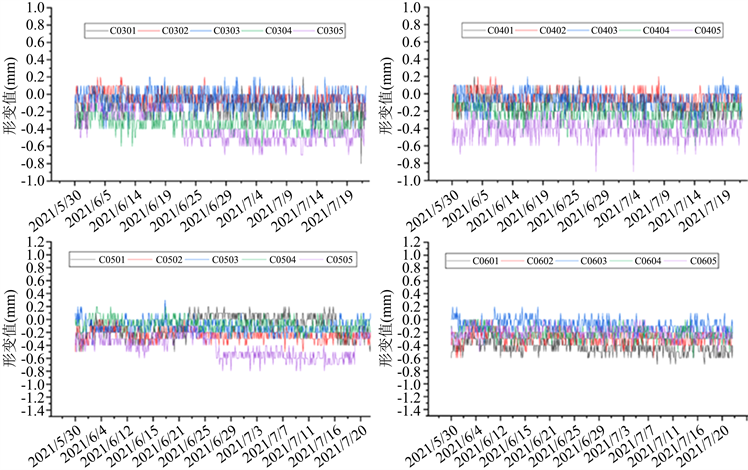
Figure 6. Cumulative longitudinal displacement from section C03 to section C06
图6. C03断面至C06断面累积纵向位移

Figure 7. Cumulative transverse displacement from section C03 to section C06
图7. C03断面至C06断面累积横向位移
5.2.2. 竖向位移监测结果分析
C03断面至C06断面2021年5月30日至2021年7月22日的累积竖向位移如图8所示。竖向位移累积最大点位是位于5号断面的5号点,最大位移为−0.9 mm;其余点的位移较小,都在−0.9~0.3 mm,都在预警值(6 mm)以内。同一断面道床沉降差差值最大断面为5号断面、差值为−0.30 mm。因此,因外部违规地质钻孔导致管片受损引发的隧道结构竖向变形处于安全可控范围。
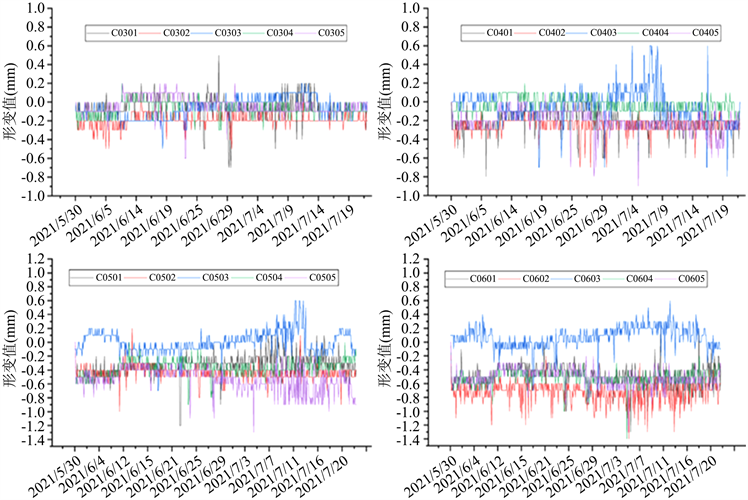
Figure 8. Cumulative vertical displacement from section C03 to section C06
图8. C03断面至C06断面累积竖向位移
5.3. 基于卡尔曼滤波的测点位移原因分析
测点位移监测结果显示C03至C06断面的横向位移在六月上旬有较为显著的变化,为了探究测点位移的原因,本文采用改进的卡尔曼滤波方法对距离隧道击穿位置最近点C0503的监测数据进行处理,分析降雨和施工对测点横向位移的影响,结果如图9所示。由卡尔曼滤波结果可以看出在整个监测期间,六月份的形变波动量较大,而六月的降水量小,因此推断降雨不是影响形变的主要因素。在基坑开挖前要对施工区域进行降水,降水坑在铁路往大里程方向的右侧,在降水期间右侧土层压力减小,因此横向位移表现出增大的趋势。在基坑开挖及堵漏阶段,C0503横向位移表现出较大的波动,完成基坑回填后横向位移逐渐稳定。
综合以上监测数据可知:本次既有轨道交通隧道受外部施工干扰,致使盾构隧道管片受损事件,未对地铁隧道结构产生明显的变形影响。4、5号断面距离钻探位置最近受施工影响较大,故4、5号断面位移幅度相对较大,但变形值远小于预警值。鉴于钻探施工已经回填,各类型的监测结果均小于控制值,变化速率稳定,结合现场巡查情况,说明该区域结构基本稳定。
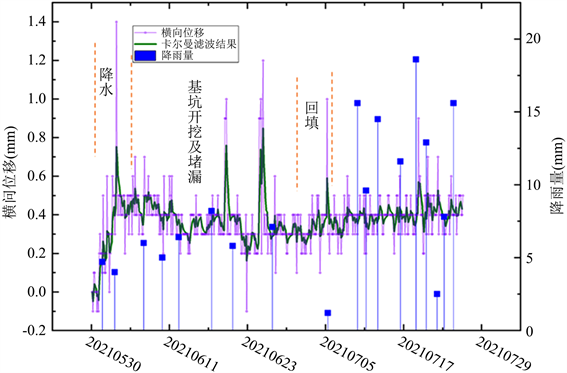
Figure 9. Lateral displacement data processing of measuring points based on Kalman filter and analysis of displacement causes of measuring points
图9. 基于卡尔曼滤波测点横向位移数据处理及测点位移原因分析图
6. 结论
本文针对外部违规地质钻孔导致管片受损隧道区段,采用智能型测量机器人对隧道结构变形进行自动化监测,并利用改进的卡尔曼滤波方法对形变数据进行处理,分析了监测点位移的原因。结果表明采用改进后的卡尔曼滤波通过引入NI序列,可以更好地确定测量数据在滤波过程中的权重,滤波结果可以较好的反映监测点位移变化,有利于对监测点位移的分析。另外本次监测结果表明监测区域内地铁隧道结构纵向、横向、竖向位移幅度小,变化速率稳定,均小于预警值,以实测数据证明了本次外部违规地质钻孔导致管片受损事件未对隧道结构安全造成实质影响。通过实际案例应用表明,为确保地表和盾构隧道安全,采用智能型测量机器人对受扰动区段进行平面及竖向位移自动化变形监测,以实时掌握外部施工对既有地铁隧道结构产生的变形影响,利用自动化监测数据指导现场施工,及时采取紧急措施,遏制事态恶化,为地铁运营的科学决策提供了数据支撑,有效地保障了地铁的安全运营。同时,为类似工程项目积累经验,解决运营期地铁隧道安全监测难题,是一种有效监测手段。
基金项目
铁路智能化勘测成套技术的研究(KSNQ201019)。