摘要: 针对传统服务机器人功能单一,无法适应多场景应用的现状,设计了一种模块化、一体化的多用途机器人。首先论证了多功能机器人框架结构与功能;其次紧密结合实际需要,研究了轮椅、拖地、扫地、消杀等四个功能模块的结构特征及工作原理;最后基于磁吸自主替换原理,设计了底部磁吸盘设备,利用磁吸原理与不同箱体嵌合,创新性实现了爬楼机器人箱体自主替换。多用途机器人的研制必将有效提高人们的生活质量,对服务机器人发展也将起到积极的促进作用。
Abstract:
Aiming at the current situation that the traditional service robot has a single function and cannot adapt to multi-scenario applications, a modular and integrated multi-purpose robot is designed. Firstly, the frame structure and function of multi-purpose robot are demonstrated; Secondly, the structural characteristics and working principles of four functional modules, namely wheelchair, mopping, sweeping and disinfection and sterilization, are studied in close combination with the actual needs; Finally, based on the principle of independent replacement of magnetic suction, the bottom magnetic suction device is designed, and the independent replacement of the climbing robot box is innovatively realized by using the principle of magnetic suction and embedding different boxes. The development of multi-purpose robots will effectively improve people’s quality of life, and will also play a positive role in promoting the development of service robots.
1. 引言
2021年以来全球服务型机器人国内外市场渗透率提升趋势明晰,人工智能领域技术创新与科研成果转化进展迅速,服务机器人已走进了人们的日常生活 [1] [2] 。通过服务型机器人代替人类进行一些基础服务,成为有效提开域市服务业竞争力、降低居民生活成本,并进一步提升国家城市化管理的有效手段,业外,5G、物联网、云计算、语义识别、人工智能等技术的成熟,让服务型机器人一直以来的痛点——不够智能、效率不足等问题得到逐步解决 [3] [4] 。疫情背景下无接触服务需求快速上升,使得服务机器人需求量大大增加。资料表明,继2020年的年销量增长24%之后,服务机器人销量将在2021年加速增长31%。
当前市场上的服务机器人应用场景较为单一,功能局限性较大,如扫地、拖地或者轮椅功能各自独立。随着传感器技术以及移动攀升机器人技术的迅速发展,模块化楼梯攀升机器人控制系统的研制与开发已具备了坚实的基础和良好的市场发展前景,为提高服务机器人的便利性与使用效率,多功能、智能化、一体化的机器人设计成为未来服务机器人发展的必然趋势。基于上述背景,本文基于“集成创新”发展理念,融合四个模块、不同箱体的切换性能、提升爬楼稳定性等多方面优势,以爬楼机器人为基础模块,设计了一种可自动替换的一体化机器人,有效提高服务机器人的服务效率,对开拓此类机器人市场占有率也有积极的促进作用。
2. 多用途机器人框架结构
爬楼机器人是多用途机器人的基础框架,框架结构配备了四个万向轮,两个普通轮,四个普通实心
橡胶轮并各带一个电机,两个旋转台,运用了四根丝杆一个电推杆实现升降结构;前中后方各有两个万向轮,前方的比中间的高一个台阶的高度并组成一个抬升架,两个普通轮在后方做支撑架,并配有电机和推杆,其可搭配各模块同时完成不同的工作。框架结构由钢材作为主要框架,如图1所示。
框架结构工作过程中借助智能监控设备与底部实心橡胶轮,云端实时监测障碍物。实现爬楼机器人自主避障与不同方位自由驱动与智能提示;借助红外测距设备,实时传送云端楼梯测算高度,实现爬楼机器人自主调节爬升纵距。
框架结构采用框架爬升原理,提升了机器人爬楼稳定性,在实现爬升双箱体运作的同时,使爬楼机器适应各种不同的应用场景。
3. 模块化一体机设计
3.1. 轮椅模块结构设计
针对居住在无电梯和老旧城区的残障人士上下楼的问题,轮椅模块作为多用途机器人的重要组成部分 [5] ,兼顾了爬楼轮椅的重要作用。轮椅模块由履带、可替换椅架、坐垫组成,轮椅模块结构如图2所示。在基础模块的左右两侧加入履带,换上座椅框架,在上楼梯时,框架微微抬起履带进行运作,履带通过电动推杆伸缩贴合楼梯的坡度,与其形成一定的角度,履带的驱动靠内置的电机进行。履带可减轻重量的分配,保证上楼的安全性。框架在轮椅结构起到支撑和转向作用,同时底部的磁力吸盘若检测到轮椅有倒下的风险,将会有紧急贴地功能,从而保障轮椅安全性。
履带结构由电动推杠控制抬升高度,以适应不同坡度的楼梯,使其在楼梯上时,其座椅与地面保持水平上升。前置轮由电机作为驱动装置,带动整台轮椅的运作。履带的平稳性搭配框架的灵活度使得轮椅不管在平地还是楼梯都能运转自如。如图3所示。
框架底部配备德式玻璃吸盘,电动推杆加装于吸盘推拉处,以实现自动控制其吸盘吸附地面。当机器人达到一定的倾斜程度,机器人将会自动报警并由电动推杆放下吸盘,吸附地面,防止过渡倾斜带来的危险隐患。
基于人机工程原理设计了靠垫及脚踏板的可调节功能,确保靠垫的最舒适角度。可拆卸功能也方便机器人拆装下后清洗工作的进行,更好的便民利民。
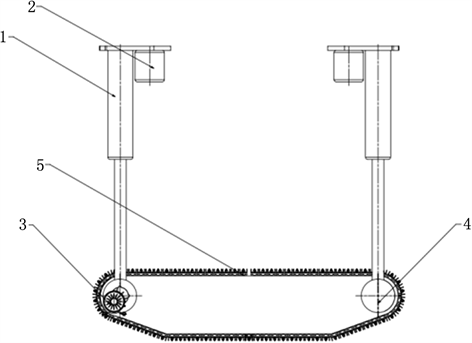 1-电动推杆2-电动推杆电机3-驱动电机4-固定轴5-履带
1-电动推杆2-电动推杆电机3-驱动电机4-固定轴5-履带
Figure 3. Track structure
图3. 履带结构
3.2. 拖地模块结构设计
传统的拖地机器人多需要回到基站进行拖把清洗,且效率低,无法达到清洁多层阶梯的作用 [6] 。基于此我们设计了一款自带水箱海绵刷可自动进行清洗的拖地机器人。由双出轴电机、海绵、电动推杆、海绵内轴组成,拖地模块高度为380 mm,宽度为650 mm,水箱能容纳约10 L水,双出轴电机通过联轴器,连接海绵内轴,海绵固定在内轴外,电机驱动内轴,从而带动海绵转动,转数为180转/分。海绵刷可自动调节向下压力,最大压力为12 N,从而达到拖把对不同材质地面的清洁。电动推杆用作伸缩拖把,以便后续进行对拖把的清洗。海绵刷两端采用是全面平均分布的微小凸起设计,目的为了能对楼梯的表面的缝隙进行有效的清理。拖地模块结构置如图4所示。
挤水装置内搭载大扭矩电机,电机轴与齿轮进行固定后,通过齿轮齿条传动方式,驱动挤水装置两边的挤水板,清洗后的拖把置于挤水板与水箱内壁中间,挤水板向外挤压,电动推杆上方装配了一个转动装置,通过舵机驱动,可以实现拖把的90度旋转。挤水装置如图5所示。
转动装置与水箱顶板的传送带进行固定,水箱顶板中间装有一个齿轮,电机驱动齿轮,齿轮与传送带啮合,使传送带顺时针转动,把拖把送进水箱内,待拖把清洗干净后,齿轮逆向转动,把拖把转移至水箱外。顶部传输装置如图6所示。
3.3. 消毒模块结构设计
智能消毒机器人的使用,不仅可以实现防疫消杀的高效快捷,而且还能实现无人员直接接触,有效避免操作人员在危险环境中的感染风险。因此我们设计了专用消杀模块。如图7所示。
消杀模块主要由消毒液箱、消毒喷头、警示灯和消毒灯组成。市面上一般而言,人工消毒一般用液体喷洒的方式消毒,但用这种方法喷洒出的消毒液很快沉降到地面,对悬浮在空气中的微生物作用时间极短,达不到空气消毒作用消杀功能方面,基于此我们采用了雾化消毒,两个雾化喷头同时喷出消毒液,配合消毒罩可做到360°无死角消毒。该机器人能够容纳约7 L消毒液(过氧化氢,次氯酸,二氧化氯等),具备强劲的干雾消毒模式,雾量为3000 ml/h,喷雾粒径2~5 μm,消毒罩为9喷口设计,实现喷射范围内的无死角覆盖,消毒液一次性喷洒面积覆盖面积约15平米,机器人可利用消毒模块进行框架的自我消毒,以保证模块替换的时候病毒病菌不会残留。该机器人还配备紫外线消毒功能,消毒灯采用ABS材质可耐热耐冲击,辐射照度高达1200 μW/cm²,一次性可消毒40 cm²的地方,消毒灯可采用有臭氧型和无臭氧型,都可使得除螨率与杀菌率都接近100%。
3.4. 扫地模块结构设计
针对大多数扫地机器人存在的诸多问题,比如频繁倒尘盒、不够智能、清扫不彻底等等,因此我们设计了一款扫地模块如图8所示。由吸尘器,吸尘管,尘盒,旋转毛刷,滚刷,有刷电机组成。扫地部分开始时,底下的旋转毛刷将底部的小型垃圾和尘扬起并配合吸尘器将垃圾吸入尘盒之中,旋转毛刷可根据任务自动调节转速,清扫干净的同时避免把垃圾打飞,在地面清扫时转速为130转/分,当清理墙角的时候转速为350转/分。与滚刷配合能对死角位进行清洁。吸尘器可选择三挡吸力,最大吸力可达3000 pa,足以满足家中常见地面垃圾的清扫,吸尘器使用静音无刷电机和静音流体设计,工作时可降低分贝,给用户更好的体验。
吸尘管采用一根主管连接两根分管的结构,避免垃圾过多堵塞在一根管子和提升吸尘的效率,吸尘管如图9所示。
4. 自动替换装置及实现
为确保多用途机器人的服务效率,提高各功能模块的快速替换,我们设计了用于各模块快速替换的专门装置,自动替换装置由履带和电磁铁组成,如图10所示。
根据图10所示,自动替换装置采用磁吸自主替换原理,依靠底部磁吸盘设备,利用磁吸原理与不同箱体嵌合,从而实现爬楼机器人箱体自主替换。在各功能模块替换过程中,将功能模块提前放置在自动替换装置上,功能模块可在自动替换装置上进行充电,当框架结构停留于自动替换装置隔壁时,电磁铁将会配合履带将功能模块放置于框架结构上面,同理可将功能模块从框架结构放置回自动替换装置,全过程全自动替换。
5. 结论
针对服务机器人的不足与局限性,设计了一种多用途一体化机器人。利用框架结构的前端与后端相互交替实现楼梯的攀爬,依靠底部的万向节轮组实现原地转向和平移,框架结构的前端与后端均可根据任务的需求放置相应模块。多模块机器人的技术创新在于其自由变化的构型和灵活的运动方式,同时各个功能模块都有着相对独立的感知能力和运动能力。我们下一步将在复杂地形场景下完成各类任务的过程中,重点解决各模块间的运动协调一致性。
基金项目
本文得到了广东省教育厅重点领域专项(2020ZDZX2032)、广东省大学生创业实践项目(S202113684014S, S202113684015S)资助。
参考文献