摘要: 车载三维激光扫描系统作为一个多传感器集成的新兴测绘设备,被广泛应用在公路改扩建、城市信息化等项目中。在工程实践方面,点云的精度是影响成果质量的关键所在,本文从数据采集效率和成本核算出发,以传统高精度测绘手段获取的标靶点三维坐标作为真值,与点云数据中的同名特征点进行分析,针对不同车速状况下车载激光扫描系统获取的点云数据进行了精度评价。从统计结果看,Trimble MX2车载三维激光扫描系统的平面误差在±0.10 m左右和高程在±0.06 m左右,车速对点云精度影响较小,不同车速点云精度略有不同,但基本能够满足中小比例尺城市道路测量及城市部件普查工作的基本要求。
Abstract:
The vehicle-mounted 3D laser scanning system, as an emerging multi-sensor integrated surveying and mapping equipment, is widely used in projects such as highway reconstruction and expansion, urban informatization, etc. In terms of engineering practice, the accuracy of point clouds is the key factor affecting the quality of results. Starting from the efficiency of data collection and cost ac-counting, this article takes the three-dimensional coordinates of the target point obtained by tradi-tional high-precision surveying methods as the true value, analyzes the same-named feature points in point cloud data, and evaluates the accuracy of point cloud data obtained by the vehicle-mounted laser scanning system under different vehicle speed conditions. From the statistical results, it can be seen that the planar error of the Trimble MX2 vehicle-mounted 3D laser scanning system is around ±0.10 m and the elevation is around ±0.06 m. The influence of vehicle speed on point cloud accuracy is relatively small, and the accuracy of point clouds varies slightly with different vehicle speeds. However, it can basically meet the basic requirements of small and medium-sized urban road measurement and urban component survey work.
1. 引言
车载三维激光扫描系统作为快速、高效和集成度高的海量点云数据采集设备,已经成功应用于数字城市信息化建设中,它也将是未来测绘与地理信息技术的一个重要发展方向 [1] 。随着地理信息产业的软硬件的飞速发展,车载三维激光扫描系统的硬件配置也在不断提升,以全景相机为例,经过近年来的发展,其像素已经从百万级别提高到千万级别,点云数据采集精度也得到了很大的提高 [2] 。目前,关于车载三维激光扫描系统精度评定的研究已经很多,如张卡等根据误差传播定律,推导了X、Y、Z 3个方向上影响坐标误差的公式 [3] 。刘梅余等针对车载三维激光扫描系统的精度,对利用控制点提高点云数据精度的过程进行了相关性分析 [4] 。周阳林等在分析了车载激光扫描系统误差来源的基础上,按照误差来源推导了车载三维激光扫描系统综合误差模型,对其中的详细理论进行了论述 [5] 。Trimble MX2车载三维激光扫描系统作为一个高度集成系统,尤其是GNSS接收设备、IMU、车轮传感器等组成的定位定姿系统,任何一个传感器的微小误差都会引起整个系统的误差,最终都会表现在点云精度质量上 [6] 。
本文拟基于以前专家学者的研究,以工程实践应用为基础,设计一套合理且科学的实验流程,介绍Trimble MX2车载三维激光扫描系统不同车速下点云精度问题,通过对同名特征点三维坐标信息的统计分析,评价Trimble MX2车载激光扫描系统的点云数据的精度问题,为后续点云数据的有效利用提供可靠的数据来源。
2. 研究区域与方案
2.1. 研究区域介绍
本次实验路段位于太原市东霞街,该路段为近期新建路段,路面长度1.5 km,宽度30 m,路面视野宽阔,行人车辆较少,两侧为基本农田,有少许构筑物,作为本次点云精度检校场地较为合理。由于车载三维激光扫描系统多用于城市要素(如电杆、树木)信息提取和道路改扩建工程,本文精度验证主要以道路两旁目标物和道路路面特征点信息为研究对象,因此本次实验设计的点位分为目标标靶(以B开头)和路面标靶(以N、S、A开头)两种,其中目标标靶30个,为了验证道路两侧目标特征点精度,路面标靶33个,为了验证道路路面特征点精度。其具体布设情况如图1所示。

Figure 1. Experimental route and target distribution map
图1. 实验路线及标靶分布图
2.2. 研究方案
Trimble MX2车载三维激光扫描系统的主要优势在于道路及其附属物的三维空间坐标信息获取,但三维激光扫描仪具有一定的目标扫描盲目性,所以需要借助特定目标的标靶来获取相应的误差精度。本次点云精度检验分为路面标靶精度检验和目标标靶精度检验,所有标靶均采用A4纸打印的“宝马标”(20 cm × 20 cm)。路面标靶均匀分布在道路中心线上和中心线两侧,精度检验利用GNSS_RTK和水准仪获取其平面和高程信息;由于该型号车载三维激光扫描射程为250 m,为保证目标信息点云密度,目标标靶固定在离道路中线左右两侧50米处,其位置信息均通过全站仪获取。
在大量工程实践中,数据采集效率是整个项目成本核算的重要部分,车载三维激光扫描系统主要优势在于对城市道路和高速公路等公路设施及其附属物进行三维空间信息的获取。在道路点云数据采集过程中,GPS接收机误差、惯导系统误差、扫描仪的扫描频率、全景相机的曝光时间等内嵌式软硬件设备是在实验过程中可控性较小,且车速对于数据采集效率的影响最直接。所以,在基于大量工程实践数据采集效率和成本核算需要,本次点云精度检验验证了车速对其点云精度质量的影响。按照Trimble官方技术要求,Trimble MX2车载三维激光扫描系统无论是在城市道路还是高速公路作业区域,车速一般不建议超过60 km/h,且如果车速超过60 km/h,由于该设备扫描仪作业扫描频率等硬件限制,点云密度较为稀疏,对于实际工程生产和目标标靶点位的客观选取具有一定的局限性,所以本次点云精度检验实验主要设计了20 km/h、40 km/h、60 km/h几种不同车速的数据采集方案。
3. 数据采集与处理
3.1. 标靶数据采集
按照实验方案设计要求,移动测绘车在数据采集过程中沿道路中心线匀速行驶,为了验证路面点云密度对精度的影响,路面标靶信息布设中心线标靶和中心线两侧路面标靶两种情况,中心线两侧标靶布置在离中心线10 m附近。中心线(A开头,A30~A03)标靶坐标的获取利用Hebei-CORS_RTK进行采集,每个标靶观测4测回,每测回10个历元,每测回误差不超过0.05 m,其观测过程符合《城市测量规范》一级控制技术要求。因为中心线两侧标靶分布在中心线两侧,由于道路绿化带遮挡,其主要作为补充精度的特征点,采用较为图根测量这种较为简单的坐标采集模式。目标标靶坐标使用2''全站仪中的极坐标形式获取,测量过程中以路面中心线标靶点位坐标作为定向已知点进行测量作业。
路面标靶的高程通过二等水准的方式获得,其中水准路线的计算以固定A30作为起算点。如图2所示,本次水准路线形成3个闭合环路,其中A11~N3闭合环的闭合差为−0.01 mm,A001~N6方向闭合环路的闭合差为0.67 mm,A00~S5方向闭合环路的闭合差为0.29 mm,其中最弱点位A03的精度为0.2 mm,其结果均符合相应测量规范要求。
3.2. 激光点云数据采集
将GNSS基站架设在已知控制点上,在测区附近寻找开阔的区域进行系统静态初始化,该系统静态初始化后,可以保证在数据采集过程中系统运行不受道路交通的影响,即使长时间停车仍能保证POS系统的高精度。静态初始化结束后开始点云数据采集,数据采集结束后,选择开阔的区域再进行系统静态结束化。
3.3. 点云数据处理
POS数据采用后处理方式进行,在数据采集过程中基准站和车载流动站之间没有数据的关联性,需要使用Trimble配备的后处理软件POSPac进行GNSS数据和IMU数据及车轮传感器等数据的融合差分处理。使用点云处理软件Trident对激光点云数据进行预处理,将采集的全景影像进行纠正,完成点云和影像数据融合,获取彩色三维点云数据。
4. 点云精度分析
4.1. 精度评定方法
本文精度评定利用经过行车轨迹数据和激光扫描仪数据融合处理后的点云数据,与已知特征点的坐标数据进行比较,通过计算点位的中误差进行相应的精度评价。
(1)
式(1)中,
为标靶点激光点云数据的三维坐标,
为标靶点的实测坐标,
分别为高程和平面方向的中误差。
4.2. 精度评定结果
本次实验精度评价结果分为路面标靶精度评价结果和目标标靶精度评价结果两部分,其中路面标靶和目标标靶评定结果按照车速分为20 km/h、40 km/h和60 km/h三种情况。如图3所示。

 (a) (b)
(a) (b)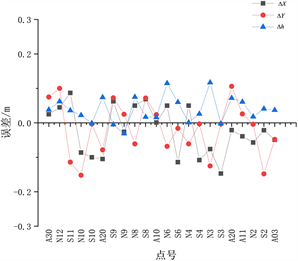 (c)
(c)
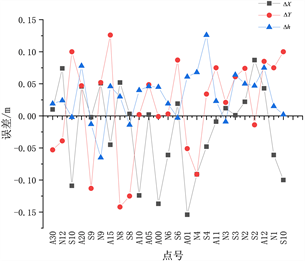
Figure 3. Evaluation of accuracy of target location at different speeds: (a) Speed of 20 km/h; (b) Speed of 40 km/h; (c) Speed of 60 km/h
图3. 不同时速目标标靶点位精度评价:(a) 时速20 km/h;(b) 时速40 km/h;(c) 时速60 km/h
从图3不同时速布设目标靶点的点位误差分布图上来看,点位误差基本分布在±0.10 m的区间之内,且速度对平面或高程的点位精度影响都较小。
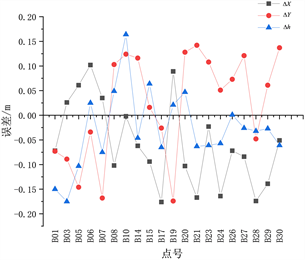
图4为路面点标靶不同车速情况下点云精度统计。
从图4路面标靶的精度检验结果来看,其误差分布规律和目标标靶坐标精度的分布规律相似。其点位精度基本在±0.10 m的合理区间内。表1为精度统计结果。

 (a) (b)
(a) (b) (c)
(c)
Figure 4. Evaluation of accuracy of point marking and target location on different speed road surfaces: (a) Speed of 20 km/h; (b) Speed of 40 km/h; (c) Speed of 60 km/h
图4. 不同时速路面点标靶点位精度评价:(a) 时速20 km/h;(b) 时速40 km/h;(c) 时速60 km/h

Table 1. Accuracy test results of target coordinate points
表1. 标靶坐标点位精度检验结果
本文在统计目标标靶和路面标靶两种特征点精度时,由于不同车速导致采集的点云密度降低,会剔除一些不能准确获取其坐标信息的特征点。从表1统计来看,路面特征点精度总体要高于目标特征点的精度。由于车载移动测量系统其扫描测程是固定的,距离扫描仪的距离越远,点云密度越稀疏,导致目标标靶特征点的数据剔除率较地面特征点的稍高一些,但是无论是路面标靶,还是目标标靶特征点,其点位精度相差无几。
5. 结束语
本文以车载三维激光扫描系统工程实践应用为目的,针对工程实践应用中道路两侧目标物提取精度和道路路面特征点精度问题,设计了一套针对不同车速的点云精度验证流程,从本文统计的结果来看,可得出以下结论:
1) Trimble MX2车载三维激光扫描系统其点位精度受车速影响较小,从统计数据结果来看,不同时速的点云采集结果的精度略有不同,可能是由于车速导致点云密度的稀疏,导致不能准确获得地面或者目标标靶特征点的点位信息所致。
2) Trimble MX2车载三维激光扫描系统采集的点云,其精度随着车速的增加,特征点的坐标精度并未受到较大的影响,基本分布在一个较为合理的区间之内,能够满足中小比例尺城市道路测量及城市部件普查工作的基本要求。